一种便携式跨平台TOFD扫查系统
一种便携式跨平台tofd扫查系统
技术领域
1.本发明主要涉及无损检测领域,尤其是一种用于焊缝缺陷定位、缺陷大小测量的便携式跨平台tofd扫查系统。
背景技术:
2.tofd无损检测于上世纪70年代提出,经过多年的发展已经成为无损检测领域十分重要的一种方法。tofd中文名为“超声衍射时差法”,主要利用了衍射原理:一个探头进行超声波的发射,另外一个探头用来接收回波,利用超声波传递过程中是否出现衍射波来确定待测材料是否存在缺陷,通过接收缺陷上下端点产生的衍射波的时间差来定位缺陷和测量缺陷的深度和缺陷的具体尺寸。发射探头发射超声纵波在检测工件中传播,接收探头会依次接收到直通波和底面反射波,如果检测工件中存在缺陷,在缺陷的两端会出现衍射现象,那么在直通波和底面反射波之间还会出现相位相反的衍射波。
3.对于大型金属制品,例如大型输油管、大型输气管、压力容器,在制造过程中不可避免地要使用焊接结构,焊接过程可能出现的焊接缺陷难以通过肉眼检查和分辨出来。同时这些大型金属制品随着使用次数的增加,出现焊缝缺陷的概率也会大大提升,严重危害工业生产安全。tofd检测方法可以准确、快速地定位缺陷并获得缺陷详细尺寸,同时不破坏金属材料自身物理化学性质,也不影响金属材料正常使用,因此在工业无损检测领域十分流行。
4.a扫图像表示的是tofd实时静态扫查信号,是tofd探头位于工件的固定位置时,接收探头以恒定时间间隔采集检测工件内部的衍射波或反射波形成的一维图像。从a扫图像中我们可以获得缺陷的波形特征和相位信息。d扫图像和b扫图像都是由多幅a扫图像累积而成的,可以在a扫图像的基础上,快速地定位缺陷位置,得到缺陷的长度和尺寸。实际进行检测时,把a扫、b扫、d扫配合使用,可以最大程度上提高焊缝缺陷检测的准确度。
5.市面上售卖的tofd扫查检测设备,板卡负责超声波发射和接收,大部分运算依赖上位机软件。因此采集时需要上位机控制,使用人员需要另行携带笔记本电脑连接板卡进行使用,不够方便。通常上位机软件仅能运行在windows平台,而且电脑和超声波板卡通常需要有线网络连接,限制很多。
技术实现要素:
6.本发明要解决的问题是:超声波电路系统需要依赖电脑运行上位机软件才能够正常使用,不够便携;上位机软件运行平台单一,扩展性差。为了解决上述两个技术问题,本发明将超声电路系统和主控模块整合在一起,研制了一种便携式、扩展性良好、操作交互简单的小型tofd无损检测系统。
7.本发明的技术解决方案是:
8.一种便携式跨平台tofd扫查系统,主要组成部分:手提金属箱、超声tofd纵波探头、超声tofd电路系统、主控模块、显示触控屏、编码器扫查系统、操作按钮。主控模块和超
声tofd电路系统通过usb连接,集成在金属手提箱内。用户可以通过触摸显示屏来操作设备。
9.该便携式跨平台tofd扫查系统的焊缝缺陷检测具体过程如下:
10.步骤一、将超声tofd探头、编码器扫查系统分别使用连接线连接到金属手提箱右侧的接口上,并将探头固定在编码器扫查系统上。打开设备电源,在软件中设置探头中心距离和其他扫查参数。
11.步骤二、将编码器扫查系统放置在待测工件焊缝上,确保发射探头和接收探头在焊缝两侧平行相对放置,选择合适的扫查起点,并在工件和探头上涂抹适量耦合剂。
12.步骤三、沿着工件焊缝移动编码器扫查系统,超声波纵波在焊缝内进行反射、衍射,接收探头接收到缺陷衍射波,传输到电路系统进行处理后送到主控模块。
13.步骤四、主控模块接收回波信号,由多个一维数组组成。每个数组代表不同时间的振幅数据,绘制振幅随时间变化的波形,即可得到a扫图像。探头移动时经过的每一点,都有对应的a扫图像,将a扫的每一点的振幅归一化到0到255范围,作为二维图像的一列像素值,多列累加即得到b/d扫图像,最后将扫查图像显示在屏幕上。
14.本发明还有以下技术特征:
15.1)主控模块采用i.mx 8m nano芯片,运行嵌入式arm linux系统。主控模块控制下,电路信号发射系统向换能器发射高频振动脉冲,从而换能器产生超声波,通过发射探头发射到被检材料的焊缝处,然后经过工件内部缺陷尖端的衍射,由换能器再次接收经过焊缝衍射回来的超声波,再将其变换为高频振动脉冲,由接收探头接收,然后送到超声tofd电路系统。
16.2)超声tofd探头采用纵波探头,探头和楔块通过螺纹连接,在工件传播声速高达5900m/s,探头工作频率5mhz,楔块探头折射角60
°
,楔块延迟2.85us。
17.3)扫查系统支持无线网络,可以在支持设备中运行上位机软件,通过无线网络连接操作扫查系统。
18.4)上位机软件采用模块化设计,由参数设置界面、扫查显示界面、图像处理界面、数据保存界面等组成。扫查显示界面可以根据需要显示不同类型的tofd扫查图像,数据保存页面可保存扫查数据进行离线分析处理。
19.相比较现有的tofd扫查系统,本发明具有以下明显的优势:
20.1)传统超声硬件系统需要与计算机运行的上位机软件协同使用,本发明采用了嵌入式一体化设计,将超声波硬件电路、主控核心、显示屏集成在一个设备中。
21.2)传统tofd设备上位机软件运行平台仅支持windows。本发明采用qt平台开发上位机软件,成像处理算法不依赖操作系统和第三方库,软件可以运行在嵌入式、桌面端、移动端的所有目标平台,通过无线网络连接设备进行扫查操作,扩展性优越,适用场景大大提升。
附图说明
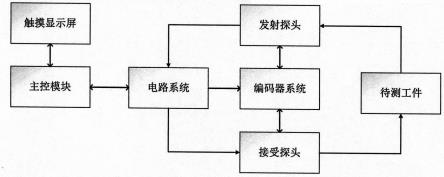
22.附图1是本公开实例的系统整体架构图。
23.附图2是本公开实例的上位机软件架构图。
24.附图3是本公开实例的tofd扫查a扫图像示意图。
25.附图4是本公开实例的超声波探头水平扫查得到b扫示意图。
26.附图5是本公开实例的超声波探头垂直扫查得到d扫示意图。
27.附图6是本公开实例的b/d扫灰度矩阵填充示意图。
28.附图7是本公开实例的a扫和b/d扫转换对应图。
具体实施方式
29.针对现有技术的不足,本发明的目的在于提供了便携式跨平台tofd扫查系统。以下结合附图,对本技术进行进一步详细说明。
30.结合图1,便携式跨平台tofd扫查系统包括主控模块、触摸显示屏、发射探头和接收探头、电路系统、编码器扫查系统。主控模块控制电路系统,电路系统控制编码器扫查系统,编码器扫查系统连接发射探头和接收探头,进行机械扫查和数据接收。扫查结果通过接收探头传输到电路系统,再到主控模块进行处理,触摸显示屏上显示生成的扫查图像。
31.结合图2,上位机软件采用qt平台开发,根据检测需求,可以通过触摸屏对上位机软件参数和扫查参数进行设置,其中包括全局参数、超声参数、闸门参数、编码器参数。上位机软件负责数据获取工作,包括超声原始数据和状态信息。在主控模块对数据进行处理并生成扫查图像后,上位机软件负责显示a扫、b扫、d扫。为了提高检测的准确性,软件内置了图像处理算法,可以实现图像预处理、噪声去除、直通波拉直、直通波取消功能。
32.实施例中支持三种成像方式,即a扫、b扫、d扫。其中a扫图像表示的tofd检测的实时静态扫查信号,是tofd探头位于工件的固定位置时,接收探头以恒定时间间隔采集检测工件内部的衍射波或反射波形成的一维图像,结合附图3,对于a扫成像,主控模块从tofd电路得到的数字信号,物理意义是不同时间的幅值数据,绘制幅值随时间变化的波形,即为a扫。
33.b/d扫均为二维图像。结合附图4,探头运动方向与超声波传播方向平行,这时候即可得到b扫图像;结合附图5探头运动方向与超声波传播方向垂直,这时候可以得到d扫图像。
34.对于b/d扫图像,均是多幅a扫图像累积生成的,把a扫图像幅值进行256级的灰度化,进行拼接就可以生成黑白两色的灰度图。a扫数据数组是一维行向量,为了生成b/d扫,需要生成一个灰度矩阵,利用a扫数据进行填充。因为灰度值范围是0到255,所以需要先对a扫数据进行范围归一化。
35.1.首先找到所有a扫数据中的最大值min和最大值max
36.2.计算范围归一化系数:
37.k=(255-0)/(max-min)
38.3.将所有振幅数据yi归一化到[0,255]范围,处理方法如下所示:
[0039]yn
=0+k*(y
i-min)
[0040]
范围归一化后,结合附图6,用行向量值来填充矩阵,即可完成b/d扫的生成。b/d扫区别仅在于探头移动方向不同,生成的方法是一致的。结合附图7,是a扫生成b/d扫对应图,可以看到b/d扫是灰度图像。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1