ADB汽车远光灯的LiDAR探测方法及装置与流程
adb汽车远光灯的lidar探测方法及装置
技术领域
1.本发明涉及汽车前照灯技术领域,具体涉及adb汽车远光灯的lidar探测方法及装置。
背景技术:
2.智能驾驶辅助功能是汽车未来发展方向,根据路况自适应变换远光光型的智能远光控制系统adb(adaptive driving beam,自适应远光系统)。激光雷达lidar(light detection and ranging,激光探测和测距),通过向外发射红外光束,通过接收投射物反射回来的光线探测物体。lidar激光雷达技术未能普及的原因主要有:工作时受天气和大气影响大,激光一般在晴朗的天气里衰减较小,传播距离较远。而在大雨、浓烟、浓雾等坏天气里,衰减急剧加大,传播距离大受影响。搜索目标困难,激光雷达的波束极窄,在空间搜索目标非常困难,直接影响对非合作目标的截获概率和探测效率,只能在较小的范围内搜索、捕获目标,因而激光雷达较少单独直接应用于战场进行目标探测和搜索。成本高,体积大。以正在测试的无人驾驶汽车为例,百度无人驾驶汽车搭载的激光雷达售价万元。目前,lidar技术还存在很大的进步空间。
3.目前,高精度激光雷达价格比较高,普遍应用的相控阵雷达、机械扫描雷达,高性能雷达价格要3~5万元,不适合推广应用,因为占汽车成本高。
技术实现要素:
4.针对现有技术中存在的技术问题,本发明提供的一种低价格、满足要求的激光雷达探测装置,制造成本低,结构简单,探测距离分段进行,安全可靠,性价比高,利于推广应用,特别是适合中低档车型,更加适合新能源汽车应用。,可以解决adb汽车远光灯的探测前方车辆的距离和行驶速度等技术问题。
5.本发明的目的至少通过如下技术方案之一实现。
6.adb汽车远光灯的lidar探测装置,包括arm控制中心、电源驱动电路、多个探测单元、信号处理电路和脉冲测距电路;
7.每个探测单元均包括一个发射单元和接收单元;多个探测单元按n行3列分布,各行的探测单元探测的距离不同,各列的探测单元探测的方向不同;
8.arm控制中心产生脉冲周期信号,并通过电源驱动电路驱动探测单元中的发射单元发射激光脉冲,激光脉冲投射到前方道路设定区域,实现周期性扫描探测;
9.激光脉冲发射的同时,arm控制中心向脉冲测距电路发送计时开始信号;
10.当激光脉冲遇到汽车时发生反射,反射光线进入接收单元产生反射信号,反射信号传输到信号处理电路,进行放大、整形处理,脉冲测距电路根据信号处理电路处理后的电信号,计算出汽车的距离信息,并将距离信息发送到arm控制中心,实现不同方向不同距离车辆的探测。
11.进一步地,发射单元包括激光器和发射透镜,接收单元包括光敏元件和接收透镜;
12.激光器发射激光脉冲经过发射透镜投射出去,激光脉冲碰到目标车辆发生反射,反射光线进入接收透镜,最后通过光敏元件接收,进而产生反射信号。
13.进一步地,发射透镜为双凹透镜结构,具有水平发射角度大、垂直发射角度小的特性;
14.接收透镜为双凹透镜结构,具有水平探测角度大、垂直探测角度小特性。
15.进一步地,各列的探测单元中,第一列的探测单元,探测汽车前方右侧道路的同方向行驶的车辆,第二列的探测单元,探测汽车正前方的同方向行驶的车辆,第三列的探测单元,探测汽车前方左侧道路的相对方向行驶的车辆。
16.进一步地,对于第n行的探测单元,n=1~n,第n行的探测单元的探测距离为n
×
h1
±
h,h1为探测单元的探测区间的间距,h为探测单元投射的探测区间的长度。
17.进一步地,汽车与前方同方向行驶的车辆的距离为h
x
,发射单元探测前方同方向行驶的车辆的水平线上方角度α,探测前方同方向行驶的车辆的水平线下方角度β,前方同方向行驶的车辆的最大高度为h。
18.进一步地,探测单元中,发射单元中激光发射的角度和接收单元探测的角度相同,包括发射单元探测前方同方向行驶的车辆的水平线上方角度α和探测前方同方向行驶的车辆的水平线下方角度β。
19.进一步地,探测单元中,发射单元发出的激光脉冲经过发射透镜后形成的探测光线的水平投射角度为90
°
,即探测光线的左右水平投射角度δ均为45
°
。
20.进一步地,探测单元中,接收单元接收反射光线的水平接收角度为90
°
。
21.adb汽车远光灯的lidar探测方法,包括以下步骤:
22.s1、arm控制中心产生脉冲周期信号,通过电源驱动电路点亮激光器,并将脉冲周期信号发送至发射单元中的激光器;
23.s2、激光器按照脉冲周期信号发射激光脉冲,同时arm控制中心向脉冲测距电路发送计时开始信号;
24.s3、激光脉冲通过发射透镜投射到前方道路设定区域,实现周期性扫描探测;
25.s4、当激光脉冲信号遇到汽车,产生反射光线,反射光线经过接收透镜进入光敏元件,光敏元件产生反射信号,并输入信号处理电路;
26.s5、信号处理电路对反射信号进行放大、整形等处理,并将处理后的电信号输入脉冲测距电路;
27.s6、脉冲测距电路根据处理后的电信号,计算出汽车的距离信息,并将汽车的距离信息发送至arm控制中心。
28.相比于现有技术,本发明的有益之处:
29.采用lidar激光雷达矩阵结构,每个发射激光器配有一个光学透镜,设计为双凹透镜结构,并且具有水平发射角度大、垂直发射角度小的特性,即激光器发射光线碰到汽车后,按照相同方向反射回来,经过收集透镜投射到光电元件,设计了收集透镜的双凹透镜结构,并且具有水平探测角度大、垂直探测角度小特性,根据探测信号决定汽车距离。创新之处是激光雷达采用三列激光发射和探测结构,分为左前方发射激光和探测、正前方发射激光和探测、右前方发射激光和探测,实现分区分段探测汽车位置功能,阵列结构激光器和光电元件按照一定角度发射和探测,避免通常情况下激光雷达探测器角度大、车辆数据判断
难度大和处理数据量大等难题。
附图说明
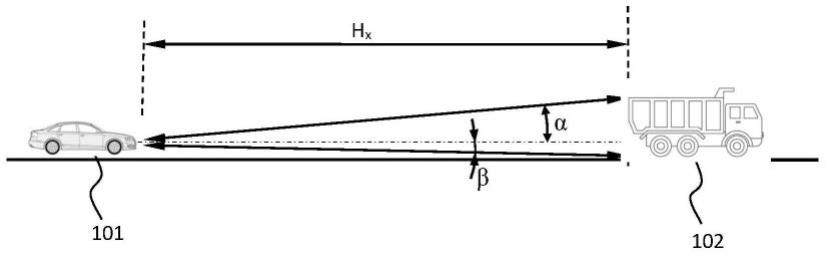
30.图1为本发明实施例中adb汽车远光灯的lidar探测装置的探测原理图;
31.图2为本发明实施例中adb汽车远光灯的lidar探测装置的探测效果图;
32.图3为本发明实施例中adb汽车远光灯的lidar探测装置的探测效果图;
33.图4为本发明实施例中adb汽车远光灯的lidar探测装置的探测单元原理图;
34.图5为本发明实施例中adb汽车远光灯的lidar探测装置的探测单元结构图;
35.图6为本发明实施例中adb汽车远光灯的lidar探测装置的发射单元的侧视结构图;
36.图7本发明实施例中adb汽车远光灯的lidar探测装置的发射单元的顶视结构图;
37.图8本发明实施例中adb汽车远光灯的lidar探测装置的接收单元的侧视结构图;
38.图9本发明实施例中adb汽车远光灯的lidar探测装置的接收单元的顶视结构图;
39.图10本发明实施例中adb汽车远光灯的lidar探测装置的结构示意图;
40.图11本发明实施例中adb汽车远光灯的lidar探测方法的步骤流程图。
具体实施方式
41.为使本发明的目的、技术方案和优点更加清楚明白,下面结合附图并举实施例,对本发明的具体实施进行详细说明。
42.实施例1:
43.adb汽车远光灯的lidar探测装置,如图4、图5和图10所示,包括arm控制中心、电源驱动电路、多个探测单元、信号处理电路和脉冲测距电路;
44.每个探测单元均包括一个发射单元和接收单元;多个探测单元按n行3列分布,各行的探测单元探测的距离不同,各列的探测单元探测的方向不同;
45.arm控制中心产生脉冲周期信号,并通过电源驱动电路驱动探测单元中的发射单元发射激光脉冲,激光脉冲投射到前方道路设定区域,实现周期性扫描探测;
46.激光脉冲发射的同时,arm控制中心向脉冲测距电路发送计时开始信号;
47.当激光脉冲遇到汽车时发生反射,反射光线进入接收单元产生反射信号,反射信号传输到信号处理电路,进行放大、整形处理,脉冲测距电路根据信号处理电路处理后的电信号,计算出汽车的距离信息,并将距离信息发送到arm控制中心,实现不同方向不同距离车辆的探测。
48.如图4、图8和图9所示,发射单元包括激光器和发射透镜,接收单元包括光敏元件和接收透镜;
49.激光器发射激光脉冲经过发射透镜投射出去,激光脉冲碰到目标车辆发生反射,反射光线进入接收透镜,最后通过光敏元件接收,进而产生反射信号。
50.进一步地,发射透镜为双凹透镜结构,具有水平发射角度大、垂直发射角度小的特性;
51.接收透镜为双凹透镜结构,具有水平探测角度大、垂直探测角度小特性。
52.如图5所示,各列的探测单元中,第一列的探测单元,探测汽车前方右侧道路的同
方向行驶的车辆,第二列的探测单元,探测汽车正前方的同方向行驶的车辆,第三列的探测单元,探测汽车前方左侧道路的相对方向行驶的车辆。
53.对于第n行的探测单元,n=1~n,第n行的探测单元的探测距离为n
×
20
±
10米,本实施例中,n=10。
54.如图1所示,汽车与前方同方向行驶的车辆的距离为h
x
,发射单元探测前方同方向行驶的车辆的水平线上方角度α,探测前方同方向行驶的车辆的水平线下方角度β,前方同方向行驶的车辆的最大高度为h。
55.如图1所示,探测单元中,发射单元中激光发射的角度和接收单元探测的角度相同,包括发射单元探测前方同方向行驶的车辆的水平线上方角度α和探测前方同方向行驶的车辆的水平线下方角度β。
56.如图2所示,lidar激光雷达探测效果图,激光雷达系统安装在主控汽车103前方,探测前方同方向行驶的车辆107,水平方向距离h1,探测相对方向行驶车辆106,水平方向距离h2。
57.如图3所示,lidar激光雷达探测效果图,主控汽车107,同方向行驶的汽车110,同方向行驶的汽车111,相对方向行驶的汽车109。
58.本实施例中,第一行有3个探测单元:探测距离为20
±
10(10~30)米,探测单元激光发射角度和探测角度相同,在探测距离为h=10米时:发射角度和探测角度均为α
10
=5.73度,β
10
=16.62度;当探测距离为h=30米时:发射角度和探测角度均为α
30
=5.73度,β
30
=1.72度,即该组探测单元仅仅探测该距离和角度的车辆信息。
59.本实施例中,第二行有3个探测单元:第探测距离为40
±
10(30~50)米,探测单元激光发射角度和探测角度相同,在探测距离为h=30米时:发射角度和探测角度均为α
30
=5.73度,β
30
=1.72度;当探测距离为h=50米时:发射角度和探测角度均为α
50
=3.44度,β
50
=1.15度,即该组探测单元仅仅探测该距离和角度的车辆信息。
60.本实施例中,第三行有3个探测单元:第探测距离为60
±
10(50~70)米,探测单元激光发射角度和探测角度相同,在探测距离为h=50米时:发射角度和探测角度均为α
50
=3.44度,β
50
=1.15度;当探测距离为h=70米时:发射角度和探测角度均为α
70
=2.29度,β
70
=0.82度,即该组探测单元仅仅探测该距离和角度的车辆信息。
61.本实施例中,第四行有3个探测单元:第探测距离为80
±
10(70~90)米,探测单元激光发射角度和探测角度相同,在探测距离为70米时:发射角度和探测角度均为α
70
=2.29度,β
70
=0.82度;当探测距离为90米时:发射角度和探测角度均为α
90
=1.72度,β
90
=0.64度,即该组探测单元仅仅探测该距离和角度的车辆信息。
62.本实施例中,第五行有3个探测单元:第探测距离为100
±
10(90~110)米,探测单元激光发射角度和探测角度相同,在探测距离为90米时:发射角度和探测角度均为α
90
=1.72度,
β90
=0.64度;当探测距离为110米时:发射角度和探测角度均为α
110
=1.56度,β
110
=0.52度,即该组探测单元仅仅探测该距离和角度的车辆信息。
63.本实施例中,第六行有3个探测单元:第探测距离为120
±
10(110~130)米,探测单元激光发射角度和探测角度相同,在探测距离为110米时:发射角度和探测角度均为α
110
=1.56度,β
110
=0.52度;当探测距离为130米时:发射角度和探测角度均为α
130
=1.32度,β
130
=0.44度,即该组探测单元仅仅探测该距离和角度的车辆信息。
64.本实施例中,第七行有3个探测单元:第探测距离为140
±
10(130~150)米,探测单元激光发射角度和探测角度相同,在探测距离为130米时:发射角度和探测角度均为α
130
=1.32度,β
130
=0.44度;当探测距离为150米时:发射角度和探测角度均为α
150
=1.15度,β
150
=0.38度,即该组探测单元仅仅探测该距离和角度的车辆信息。
65.本实施例中,第八行有3个探测单元:第探测距离为160
±
10(150~170)米,探测单元激光发射角度和探测角度相同,在探测距离为150米时:发射角度和探测角度均为α
150
=1.15度,β
150
=0.38度;当探测距离为170米时:发射角度和探测角度均为α
170
=1.01度,β
170
=0.34度,即该组探测单元仅仅探测该距离和角度的车辆信息。
66.本实施例中,第九行有3个探测单元:第探测距离为180
±
10(170~190)米,探测单元激光发射角度和探测角度相同,在探测距离为170米时:发射角度和探测角度均为α
170
=1.01度,β
170
=0.34度;当探测距离为190米时:发射角度和探测角度均为α
190
=0.9度,β
190
=0.3度,即该组探测单元仅仅探测该距离和角度的车辆信息。
67.本实施例中,第十行有3个探测单元:第探测距离为200
±
10(190~210)米,探测单元激光发射角度和探测角度相同,在探测距离为190米时:发射角度和探测角度均为α
190
=0.9度,β
190
=0.3度;当探测距离为210米时:发射角度和探测角度均为α
210
=0.82度,β
210
=0.27度,即该组探测单元仅仅探测该距离和角度的车辆信息。
68.探测单元中,发射单元发出的激光脉冲经过发射透镜后形成的探测光线的水平投射角度为90
°
,即探测光线的左右水平投射角度δ均为45
°
。
69.探测单元中,接收单元接收反射光线的水平接收角度为90
°
。
70.在图6和图7中,401是激光器,波长910
±
10nm,402是发射透镜,403是下端激光光线,404是上端激光光线,405是同方向行驶汽车,407是相对方向行驶的汽车,406是发射激光光线,408是相同方向行驶汽车。
71.在图8和图9中,501是光敏元件,502是接收透镜,503是上端反射激光光线,504是下端反射激光光线,505是同方向行驶的汽车,506是反射激光光线,507是相对方向行驶的汽车。
72.adb汽车远光灯的lidar探测方法,如图11所示,包括以下步骤:
73.s1、arm控制中心产生脉冲周期信号,通过电源驱动电路点亮激光器,并将脉冲周期信号发送至发射单元中的激光器;
74.s2、激光器按照脉冲周期信号发射激光脉冲,同时arm控制中心向脉冲测距电路发送计时开始信号;
75.s3、激光脉冲通过发射透镜投射到前方道路设定区域,实现周期性扫描探测;
76.s4、当激光脉冲信号遇到汽车,产生反射光线,反射光线经过接收透镜进入光敏元件,光敏元件产生反射信号,并输入信号处理电路;
77.s5、信号处理电路对反射信号进行放大、整形等处理,并将处理后的电信号输入脉冲测距电路;
78.s6、脉冲测距电路根据处理后的电信号,计算出汽车的距离信息,并将汽车的距离信息发送至arm控制中心。
79.实施例2:
80.本实施例中,n为11,第n行的探测单元的探测距离为n
×
25
±
12.5米
81.实施例3:
82.本实施例中,n为9,第n行的探测单元的探测距离为n
×
30
±
15米。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1