卫星导航接收机的基带时钟抖动分析方法与流程
1.本发明属于导航技术领域,具体涉及一种卫星导航接收机的基带时钟抖动分析方法。
背景技术:
2.随着经济技术的发展和人们生活水平的提高,导航技术已经广泛应用于人们的生产和生活当中,给人们的生产和生活带来了无尽的便利。因此,保障导航过程的精度,就成为了研究人员的研究重点。
3.基带时钟是导航系统的重要组成部分,基带时钟的抖动将严重影响导航系统的安全稳定运行。时钟抖动是指时钟边沿距离理想边沿位置的偏移,是衡量时钟质量的关键指标。卫星导航接收机对系统工作时钟质量有着严格要求。在卫星导航接收机基带信号处理中,工作时钟的抖动直接影响adc的信噪比与有效位数,同时也影响码环路跟踪、载波环路跟踪、抗干扰等功能,进而降低接收机整体的定位精度及系统稳定性。因此,现有的针对时钟抖动的处理方法,一般是对接收机工作时钟的抖动进行测量分析,得出现有时钟源的抖动数据指标,并在卫星导航接收机系统设计中进行优化,在一定程度上消除时钟抖动带来的影响,从而提高系统的定位精度、抗干扰性和稳定性。
4.现有的时钟抖动分析方法,一般是使用高端仪器(如具有时钟抖动测量功能的示波器、频谱分析仪、相位噪声分析仪等)在卫星导航接收机内部电路板上使用仪器探头测量时钟源的测试点,通过仪器进行时钟的采集、分析与显示。这种测量方法虽然简单,但需要依靠人工进行操作和观察,分析过程受操作者经验等因素影响较大;并且,该类高端仪器价格较为昂贵,往往超出使用者的承受范围。而且,目前卫星导航接收机具有不断小型化的趋势,内部电路板上元件密集度越来越高,留给人工操作的空间逐渐狭小,采用额外仪器进行分析操作的难度不断加大。
技术实现要素:
5.本发明的目的在于提供一种可靠性高、精确度好、易于实施且成本低廉的卫星导航接收机的基带时钟抖动分析方法。
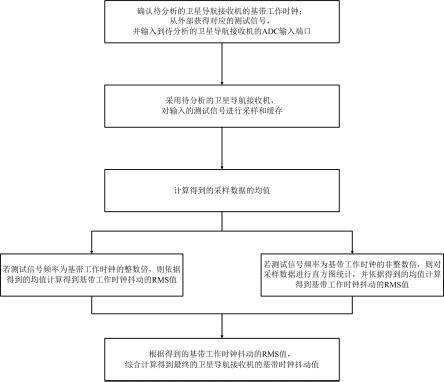
6.本发明提供的这种卫星导航接收机的基带时钟抖动分析方法,包括如下步骤:s1. 确认待分析的卫星导航接收机的基带工作时钟;从外部获得对应的测试信号,并输入到待分析的卫星导航接收机的adc输入端口;所述的测试信号包括若干种,非零且互不相同,每一种测试信号频率均为基带工作时钟的实数倍;s2. 采用待分析的卫星导航接收机,对输入的测试信号进行采样和缓存;s3. 计算步骤s2得到的采样数据的均值;s4. 若测试信号频率为基带工作时钟的整数倍,则依据步骤s3得到的均值计算得到基带工作时钟抖动的rms值;若测试信号频率为基带工作时钟的非整数倍,则对采样数据进行直方图统计,并
依据步骤s3得到的均值计算得到基带工作时钟抖动的rms值;s5. 根据步骤s4得到的基带工作时钟抖动的rms值,综合计算得到最终的卫星导航接收机的基带时钟抖动值。
7.所述的步骤s1,具体包括如下步骤:确认待分析的卫星导航接收机的基带工作时钟频率fc;采用信号发生器获取对应输出的单音正弦波测试信号,并将输出的单音正弦波测试信号通过带通滤波器后连接到待分析的卫星导航接收机的adc输入端口;测试信号的频率为f
in
,且f
in
与fc的计算关系为,式中a和b均为任意选定的正整数;一共选定n组、非零且互不相同的测试信号频率,其中第i组测试信号所对应的参数为;n为大于设定值的正整数。
8.所述的步骤s2,具体包括如下步骤:采用待分析的卫星导航接收机,对输入的测试信号进行采样和缓存;缓存时,位宽为待分析的卫星导航接收机的adc位数,数据深度为设定值m;进行采样时,对每一组输入的测试信号进行模数转换采样,当采样数据达到数据深度m时停止采样,并将采样的数据进行存储。
9.步骤s4所述的若测试信号频率为基带工作时钟的整数倍,则依据步骤s3得到的均值计算得到基带工作时钟抖动的rms值,具体包括如下步骤:a. 根据步骤s3得到的均值、输入的测试信号频率和输入测试信号的幅值,计算得到在当前输入的测试信号频率下的每个采样点的抖动值;b. 根据步骤a计算得到的每个采样点的抖动值,采用均方根计算式计算得到在当前输入的测试信号频率下的基带工作时钟抖动的rms值。
10.所述的步骤a,具体为采用如下算式计算得到在当前输入的测试信号频率下的每个采样点的抖动值:式中为当前第x个输入的测试信号频率下的第k个采样数据的值,k=1,
…
,m;为采样数据的均值;为当前第x个输入的测试信号频率;v
x
为当前第x个输入的测试信号的幅值;x=1,
…
,x,x为测试信号频率为基带工作时钟的整数倍的个数。
11.所述的步骤b,具体为采用如下算式计算得到在当前输入的测试信号频率下的基带工作时钟抖动的rms值为,式中为在当前输入的测试信
号频率下的每个采样点的抖动值,m为数据深度。
12.步骤s4所述的若测试信号为基带工作时钟的非整数倍,则对采样数据进行直方图统计,并依据步骤s3得到的均值计算得到基带工作时钟抖动的rms值,具体包括如下步骤:a. 对采样数据进行直方图统计,统计各个输出码出现的个数;b. 计算各个输出码出现的个数的累积分布;c. 采用线性插值,计算得到码密度;d. 根据步骤c得到的码密度,计算得到在当前输入的测绘信号频率下的每个采样点的抖动值;e. 根据步骤d计算得到的每个采样点的抖动值,采用均方根计算式计算得到在当前输入的测试信号频率下的基带工作时钟抖动的rms值。
13.所述的步骤a,具体为对当前第y个输入的测试信号频率下的第k个采样数据的值进行进行直方图统计,统计各个输出码j出现的个数;j为正数且,n为adc位数;y=1,2,
…
,y,y为测试信号频率为基带工作时钟的非整数倍的个数,x+y=n。
14.所述的步骤b,具体为计算各个输出码出现的个数的累计分布为;式中为各个输出码j出现的个数。
15.所述的步骤c,具体为采用如下算式计算得到码密度:式中为大于等于的最小整数;为小于等于的最大整数;为第y个输入测试信号频率下第i个相位的采样平均值;为步骤b得到的累积分布。
16.所述的步骤d,具体为采用如下算式计算得到在当前输入的测试信号频率下的每个采样点的抖动值:式中为第y个输入测试信号频率下的采样点,j=0,1,
…
,m-1;i为计算参数,
取值为j除以b的余数。
17.所述的步骤e,具体为采用如下算式计算得到在当前输入的测试信号频率下的基带工作时钟抖动的rms值:式中m为数据深度。
18.所述的步骤s5,具体为采用如下算式计算得到最终的卫星导航接收机的基带时钟抖动值tj为,式中为第x组测试信号频率为基带工作时钟的整数倍的基带工作时钟抖动的rms值;为第y组测试信号频率为基带工作时钟的非整数倍的基带工作时钟抖动的rms值。
19.本发明提供的这种卫星导航接收机的基带时钟抖动分析方法,针对现有对于接收机基带工作时钟抖动测量受人工因素影响误差大、操作不便、仪器使用成本高等不足,在不改变接收机已有的硬件电路结构情况下,利用卫星导航基带电路已有的adc进行采样分析,摆脱了人工测量因素的影响,降低了仪器成本和测量成本,提高了工作效率;而且本发明方法的实现原理简单,可操作性强,可靠性高、精确度好、易于实施且成本低廉。
附图说明
20.图1为本发明方法的方法流程示意图。
具体实施方式
21.如图1所示为本发明方法的方法流程示意图:本发明提供的这种卫星导航接收机的基带时钟抖动分析方法,包括如下步骤:s1. 确认待分析的卫星导航接收机的基带工作时钟;从外部获得对应的测试信号,并输入到待分析的卫星导航接收机的adc输入端口;所述的测试信号包括若干种,非零且互不相同,每一种测试信号频率均为基带工作时钟频率的实数倍;具体包括如下步骤:确认待分析的卫星导航接收机的基带工作时钟频率fc;采用信号发生器获取对应输出的单音正弦波测试信号,并将输出的单音正弦波测试信号通过带通滤波器后连接到待分析的卫星导航接收机的adc输入端口;测试信号的频率为f
in
,且f
in
与fc的计算关系为,式中a和b均为任意选定的正整数;一共选定n组、非零且互不相同的测试信号频率,其中第i组测试信号所对应的参数为;n为大于设
定值的正整数;s2. 采用待分析的卫星导航接收机,对输入的测试信号进行采样和缓存;具体包括如下步骤:采用待分析的卫星导航接收机,对输入的工作时钟进行采样和缓存;缓存时,位宽为待分析的卫星导航接收机的adc位数,数据深度为设定值m;进行采样时,对每一组输入的测试信号进行采样,当采样数据达到数据深度m时停止采样,并将采样的数据进行存储;具体实施时,接收机基带采样电路包括基带已有的adc、数据fifo和嵌入式处理器,采样电路的工作时钟由基带时钟源提供;正常工作模式下,adc的输入与接收机内部的射频前端输出的模拟中频信号相连;当进行时钟抖动分析时,需要将adc的输入端口通过测试点与外部信号发生器产生的单音正弦波信号相连;将卫星导航接收机基带电路配置为数据采样模式,adc采集数据由内部数据fifo进行缓存,fifo位宽为adc位数,fifo数据深度为m;s3. 计算步骤s2得到的采样数据的均值;s4. 若测试信号为基带工作时钟的整数倍,则依据步骤s3得到的均值计算得到基带工作时钟抖动的rms值;具体包括如下步骤:a. 根据步骤s3得到的均值、输入的测试信号频率和输入信号的幅值,计算得到在当前输入的测试信号频率下的每个采样点的抖动值;具体为采用如下算式计算得到在当前输入的测试信号频率下的每个采样点的抖动值:式中为当前第x个输入的测试信号频率下的第k个采样数据的值,k=1,
…
,m;为采样数据的均值;为当前第x个输入的测试信号频率;v
x
为当前第x个输入的测试信号的幅值;x=1,
…
,x,x为测试信号频率为基带工作时钟的整数倍的个数;b. 根据步骤a计算得到的每个采样点的抖动值,采用均方根计算式计算得到在当前输入的测试信号频率下的基带工作时钟抖动的rms值;具体为采用如下算式计算得到在当前输入的测试信号频率下的基带工作时钟抖动的rms值为,式中为在当前输入的测试信号频率下的每个采样点的抖动值,m为数据深度;若测试信号为基带工作时钟的非整数倍,则对采样数据进行直方图统计,并依据步骤s3得到的均值计算得到基带工作时钟抖动的rms值;具体包括如下步骤:a. 对采样数据进行直方图统计,统计各个输出码出现的个数;具体为对当前第y个输入的测试信号频率下的第k个采样数据的值进行进行直方图统计,统计各个输出码j出现的个数;j为正数且,n为adc位数;y=1,2,
…
,y,y为测试信
号频率为基带工作时钟的非整数倍的个数,x+y=n;b. 计算各个输出码出现的个数的累积分布;具体为计算各个输出码出现的个数的累计分布为;式中为各个输出码j出现的个数;c. 采用线性插值,计算得到码密度;具体为采用如下算式计算得到码密度:式中为大于等于的最小整数;为小于等于的最大整数;为第y个输入测试信号频率下第i个相位的采样平均值;为步骤b得到的累积分布;d. 根据步骤c得到的码密度,计算得到在当前输入的工作时钟频率下的每个采样点的抖动值;具体为采用如下算式计算得到在当前输入的测试信号频率下的每个采样点的抖动值:式中为第y个输入测试信号频率下的采样点,j=0,1,
…
,m-1;i为计算参数,取值为j除以b的余数;e. 根据步骤d计算得到的每个采样点的抖动值,采用均方根计算式计算得到在当前输入的测试信号频率下的基带工作时钟抖动的rms值;具体为采用如下算式计算得到在当前输入的测试信号频率下的基带工作时钟抖动的rms值:式中m为数据深度;s5. 根据步骤s4得到的基带工作时钟抖动的rms值,综合计算得到最终的卫星导航接收机的基带时钟抖动值;具体为采用如下算式计算得到最终的卫星导航接收机的基带
时钟抖动值tj为,式中为第x组测试信号频率为基带工作时钟的整数倍的基带工作时钟抖动的rms值;为第y组测试信号频率为基带工作时钟的非整数倍的基带工作时钟抖动的rms值。
22.以下以一个实施例,对本发明方法进行进一步说明:卫星导航接收机基带工作时钟频率为60mhz,基带芯片内部adc转换位数为12位。根据步骤s1,选取10组测试信号,波形为单音正弦波,输出幅值均为0.9vpp,频率分别为56.25mhz、60mhz、60.6mhz、75mhz、90mhz、115.3846mhz、120mhz、120.9375mhz、168mhz、180mhz。通过外部信号发生器依次分别产生对应频率的测试信号,经过与频率相对应的带通滤波器后连接到待分析的卫星导航接收机的adc输入端口。
23.根据步骤s2,将卫星导航接收机设置为数据采集模式,对输入的每一组测试信号通过基带工作时钟分别进行采集和缓存。采集数据位宽为12位,数据深度为8192,共采集10组数据根据步骤s3,分别计算10组测试信号的8192个采样数据的平均值根据步骤s4,输入频率为60mhz、120mhz、180mhz的测试信号,其频率为基带工作时钟的整数倍,计算得到相对应的基带工作时钟抖动rms值分别为 1.16ps、1.45ps、1.59ps输入频率为56.25mhz、60.6mhz、75mhz、90mhz、115.3846mhz、120.9375mhz、168mhz的测试信号,其频率为基带工作时钟的非整数倍,需要采用统计学方法进行计算,首先对每种频率的8192个采样值进行直方图统计,计算累积分布并求取码密度,得到每个采样点的抖动值并求取均方根,从而求取基带工作时钟抖动rms值分别为1.15ps、1.21ps、1.29ps、1.36ps、1.42ps、1.46ps、1.57ps根据步骤s5,计算得出基带时钟rms抖动值为1.37ps。使用具有测量时钟抖动功能的示波器进行测量,基带时钟测量抖动值为1.31ps,其误差在5%以内,精度和准确度没有明显下降,从而证明了本发明的有效性和准确性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1