一种仿生多功能传感器及其制备方法、应用
1.本发明涉及可穿戴传感器技术领域,具体涉及一种仿生多功能传感器及其制备方法、应用。
背景技术:
2.可穿戴设备是一种可以安装在人、动物和物品上,并能感知、传递和处理信息的设备,传感器是可穿戴设备的核心器件。可穿戴的传感器广泛应用于工业生产、医疗健康以及日常家居中,推动了人机交互、高性能机器人和健康监测等领域的迅猛发展。其中,压力、应变、温度、震动以及风速传感器等在过去十年受到广泛的关注。在提高传感器灵敏度、响应时间、测试范围和耐疲劳性的同时,如何将多种传感功能集于一体也成为了一个重要研究方向。研发良好的多功能传感设备,将极大程度的拓展对周围环境等的感知能力,同时也能降低传感设备的使用面积和制造成本。
3.近来,有文献(advanced materials,2019年,31卷,36期,1902831页)报道,利用热释电材料钛酸钡制备传感器阵列检测温度,同时也可以检测震荡的压力。也有文献(nature communications,2020年,11卷,1期,1-10页)报道了一种利用镍颗粒和pvdf-hfp混合制备的自愈合海绵,其可实现对压力和靠近的感知。另有文献(science advances,2020年,6卷,45期,eabd0202页)报道,将心电图传感器、温度传感器、声学以及运动传感器全部集成在一张自愈合弹性薄膜上,来达到对这些信号的感知。
4.但是,这些报道的传感设备中,要么检测的信号较少,仅为双功能感知,不足以满足日渐提高的需求;要么结构复杂,产生过多且密集的线路,会对数据读取时间产生更多的延迟,而且也需要更多的外接端口。因此,如何得到一种多功能感知、结构简单等综合性能更加优异的传感器,已成为该领域的研究者亟需解决的问题之一。
技术实现要素:
5.有鉴于此,本技术提供一种仿生多功能传感器及其制备方法、应用,本发明提供的多功能传感器在保证温度、压力、气流等多功能感知的同时,具有简单的结构,利于应用。
6.本发明提供一种仿生多功能传感器,包括柔性电路板和多孔热电薄膜,所述多孔热电薄膜呈条状且倾斜设置于柔性电路板上,所述多孔热电薄膜长度方向两端与柔性电路板的电路导电连接。
7.在本发明的实施例中,所述多孔热电薄膜包括:倾斜设置于柔性电路板上的柔性多孔基底薄膜,以及复合在柔性多孔基底薄膜至少一个表面上的热电薄膜;所述热电薄膜呈条状,且长度方向两端与柔性电路板的电路导电连接。
8.在本发明的实施例中,所述热电薄膜厚度为200~700nm,塞贝克因子为50~200μv/k。
9.在本发明的实施例中,所述热电薄膜长度方向至少一端连接导电薄膜,用于与柔性电路板的电路导电连接。
10.在本发明的实施例中,所述导电薄膜厚度为50~200nm。
11.在本发明的实施例中,所述热电薄膜长度方向仅一端连接导电薄膜,并与导电薄膜形成u形结构。
12.在本发明的实施例中,所述倾斜设置的多孔热电薄膜与柔性电路板之间的夹角为40~70
°
。
13.在本发明的实施例中,所述柔性电路板由柔性衬底及其表面的液态金属线路构成,所述柔性衬底上具有倾斜沟槽,用于倾斜设置多孔热电薄膜;所述液态金属线路与多孔热电薄膜长度方向两端导电连接。
14.本发明提供前文所述的仿生多功能传感器的制备方法,包括以下步骤:
15.分别提供柔性电路板、条状的多孔热电薄膜;
16.将所述多孔热电薄膜倾斜设置在柔性电路板上,并使两者导电连接,封装。
17.本发明还提供前文所述的仿生多功能传感器在制造机器人、人机交互以及健康监测中的应用。
18.本发明实施例提供了一种仿生多功能传感器,其包括柔性衬底、多孔热电薄膜以及液态金属线路;所述柔性衬底与液态金属线路形成柔性电路板,所述多孔热电薄膜呈条状且倾斜设置于柔性电路板上,其长度方向两端与电路导电连接。例如,所述的多孔热电薄膜插入柔性衬底后,其热电薄膜和导电薄膜重叠的一端(u形的闭口一端)悬于空中,且两者分别与液态金属线路连接。同时,本发明的另一目的在于提供一种简化的多功能传感器的制备方法。与现有技术相比,本发明提供的上述仿生多功能传感器,能同时感知热源靠近、温度、压力、气流以及高频震动;而且该传感器结构简单,其制备流程也非常简单,具有全自动化、机械化生产的潜力,同时对这些信号的感知具有卓越的表现。实验结果表明,采用本发明制备的仿生多功能传感器,在可探测距离25cm的40℃热源,还有-189~150℃的目标物体温度,以及1~20.4m/s的风速探测范围和1000hz的高频震动感应,这将使其在仿生机器人、智能监测以及人机界面等领域具有重要的应用前景。
附图说明
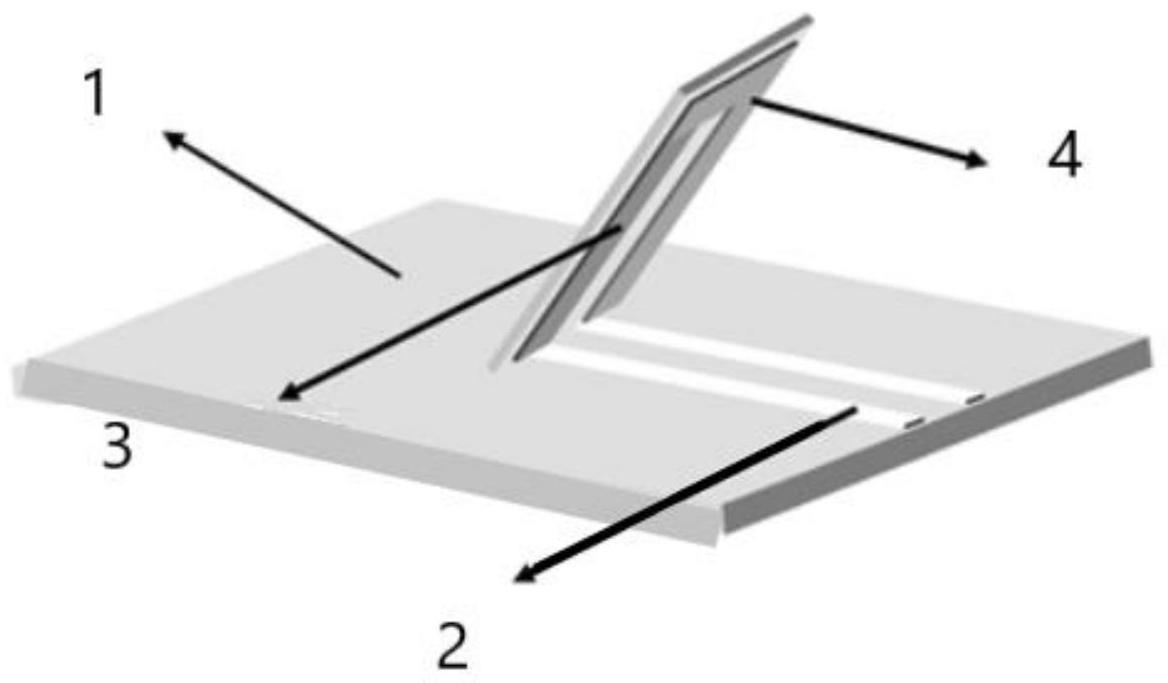
19.图1为本发明一些实施例提供的多功能传感器结构示意图;
20.图2为本发明一些实施例中的热电薄膜和铜薄膜构成的u形结构尺寸图;
21.图3为本发明实施例1制备的多功能传感器对热源靠近距离的感知曲线;
22.图4为本发明实施例1制备的多功能传感器对压力循环的电阻响应曲线;
23.图5为本发明实施例1制备的多功能传感器对目标物体温度的电压响应曲线;
24.图6为本发明实施例1制备的多功能传感器对前向风不同风速的电阻响应曲线;
25.图7为本发明实施例1制备的多功能传感器对背向风不同风速的电阻响应曲线;
26.图8为本发明实施例1制备的多功能传感器对高频震动的电流响应曲线。
具体实施方式
27.为了进一步理解本发明,下面结合实施例对本发明优选实施方案进行描述,但是应当理解,这些描述只是为了进一步说明本发明的特征和优点,而不是对发明权利要求的限制。
28.本发明提供了一种仿生多功能传感器,其包括柔性电路板和多孔热电薄膜,所述多孔热电薄膜呈条状且倾斜设置于柔性电路板上,所述多孔热电薄膜长度方向两端与柔性电路板的电路导电连接。
29.参见图1,图1为本发明一些实施例提供的多功能传感器结构示意图;其中,1为柔性衬底,2为液态金属线路,3为热电薄膜,4为铜薄膜。
30.本发明所述的仿生多功能传感器包括柔性电路板,其优选由柔性衬底1及其表面的液态金属线路2构成,主要起到支撑传感部件、导出电信号等作用。本发明对所述的柔性衬底材质种类、形状尺寸等的选择没有特别的限制,一般满足轻薄、可弯折、拉伸等变形性质的衬底即可;本发明优选的柔性衬底材质包括pdms、热塑性聚氨酯、聚酰胺以及水凝胶中的一种或多种,更优选的为pdms或热塑性聚氨酯,最优选的为pdms。pdms中文名称是聚二甲基硅氧烷,其优势包括方便易得、化学性质稳定、透明和热稳定性好等。
31.本发明优选实施例可将市售聚二甲基硅氧烷(pdms)基体和固化剂混合固化,形成较薄的柔性衬底,厚度在1~2mm之间即可;优选的,所述的pdms基体和固化剂的质量分数比为(8~12):1。pdms的基体和固化剂为本领域常见的实验用的材料,可直接购买于道康宁公司,型号为sylgard 184。在上述质量配比条件下制备衬底,强度韧性适中,且容易制备该柔性衬底。
32.在本发明的一些实施例中,所述柔性衬底1上具有倾斜沟槽,用于倾斜设置多孔热电薄膜;所述柔性衬底1表面可打印形成液态金属线路2,其与多孔热电薄膜长度方向两端导电连接。本发明实施例可利用激光加工设备在柔性衬底上刻蚀一系列倾斜的沟槽,随后将含有沟槽的pdms衬底进行亲水处理,再在所述倾斜沟槽附近打印液态金属线路,形成柔性电路板。所涉及的液态金属常见的有镓铟锡合金,线路尺寸为0.5~2mm宽均可。
33.进一步优选的,所述的倾斜沟槽其倾角为40~70
°
,长度为3.5mm,深度为0.4~1mm,宽度为0.02~0.1mm。所述的液态金属线路采用本领域常用的材质,能导出电信号即可。
34.作为优选,本发明实施例所述的多孔热电薄膜包括柔性多孔基底薄膜和热电薄膜3。所述的柔性多孔基底薄膜倾斜设置于柔性电路板上,其表面可通过掩膜板沉积形成一层热电薄膜3,使多孔热电薄膜可感知温度或热源靠近、压力和气流等多种信号。
35.本发明实施例对所述的柔性多孔基底薄膜的材质选择没有特别限制;本发明优选包括纤维素薄膜、聚四氟乙烯薄膜、聚偏氟乙烯薄膜和尼龙薄膜中的一种或多种,更优选为聚四氟乙烯薄膜和/或尼龙薄膜,最优选为尼龙薄膜。所述的柔性多孔基底薄膜的孔径优选为0.1μm,厚度100μm左右,为商业购买的材料;其孔隙率或孔径过大则材料初始电阻就随之增大,可能增大信号噪音,而厚度较厚则对小压力的感知可能不足够灵敏。所述倾斜设置的柔性多孔基底薄膜与柔性电路板之间的夹角为40~70
°
,例如40
°
、45
°
、50
°
、60
°
等。
36.本发明实施例所述的热电薄膜是热电材料形成的,具有孔隙结构且呈条状;所述热电薄膜长度方向两端与柔性电路板的电路导电连接。本发明对所述的热电材料的选择没有特别的限制,本发明优选包括碲化锑(sb2te3)、碲化铋(bi2te3)、n型碲化铋(bi2te
2.7
se
0.3
)以及p型碲化铋(bi
0.5
sb
1.5
te3)中的一种或多种碲化物热电材料,更优选的为sb2te3和bi
0.5
sb
1.5
te3中的一种或多种,最优选的为sb2te3。
37.在本发明的实施例中,所述热电薄膜厚度优选为200~700nm,塞贝克因子为50~
200μv/k。所述热电薄膜的孔隙及倾斜结构基本与柔性多孔基底薄膜一致,其长条形状类似于人的头发丝,长度远大于宽度;由于复合在倾斜设置的柔性多孔基底薄膜表面,对压力、震动等信号有一定的感应。
38.如图1所示,所述热电薄膜3长度方向一端与液态金属线路2连接,另一端通过铜薄膜4与液态金属线路连接;铜薄膜可与热电薄膜形成u形、v形等连接方式。所述的铜薄膜4起到导电连通电路的作用,还可以采用其他的金属作为导电薄膜,本发明并无特殊限制。
39.图2为本发明一些实施例中的热电薄膜和铜薄膜构成的u形结构尺寸图,热电薄膜非重叠连接的形状为长方形,宽1mm,重叠连接处1mm宽、3mm长,铜薄膜尺寸相同,总长8mm。在本发明的实施例中,所述导电薄膜厚度可为50~200nm。图2仅是尺寸形状示例,本发明所述的多孔热电薄膜结构形状并不限于此。
40.本发明实施例制备前文所述的仿生多功能传感器,先分别制备柔性电路板、条状的多孔热电薄膜;再将所述多孔热电薄膜倾斜设置在柔性电路板上,并使两者导电连接,形成所述的传感器件。
41.本发明实施例提供了一种仿生多功能传感器的制备方法,具体包括以下步骤:
42.s1)在柔性多孔基底薄膜上通过掩模板沉积一层若干条状热电薄膜(如采用碲化物热电材料);在所述的热电薄膜旁边沉积一层铜薄膜(作为铜电极),并与热电薄膜部分重叠形成u形结构;
43.s2)将pdms基体和固化剂混合固化形成较薄的柔性衬底;利用激光加工设备在柔性衬底上刻蚀一系列倾斜的槽子,并且在槽子附近打印液态金属线路(在打印之前柔性衬底先经过亲水处理),形成柔性电路板;
44.s3)将热电薄膜和铜薄膜裁剪成单个u形单元,插入柔性衬底的槽子上,并确保与液态金属线路连接良好,最后将器件封装好。
45.本发明实施例中所有原料如前所述,对其来源没有特别限制,在市场上购买的或按照本领域技术人员熟知的常规方法制备的即可。其中,所述的柔性多孔基底薄膜可选自纤维素薄膜、聚四氟乙烯薄膜、聚偏氟乙烯薄膜和尼龙薄膜中的一种或多种高分子薄膜,更优选为聚四氟乙烯薄膜或尼龙薄膜,最优选为尼龙薄膜。所述的热电薄膜材料厚度为200~700nm,塞贝克因子为50~200μv/k。
46.本发明实施例中的沉积、固化及打印均为本领域人员熟知的操作,本发明并无特殊限制。例如,沉积热电薄膜可采用磁控溅射技术。作为优选,将聚二甲基硅氧烷(pdms)基体和固化剂以质量分数8~12:1的配比混合,灌入模具中,50~70℃固化后形成较薄的柔性衬底。
47.在本发明的优选实施例中,首先在柔性多孔高分子薄膜的正面通过掩模板沉积大量热电薄膜和铜薄膜构成的u形单元,随后将柔性多孔基底膜上大量u形单元一个个裁剪下来形成热电晶须,然后利用激光刻蚀在pdms上刻蚀倾斜的槽子,并在导电的槽子周围打印好液态金属线路,最后将上述的热电晶须插入pdms衬底的槽子中,使其与打印的液态金属线路连接好并封装起来,从而得到最终的多功能的传感器。
48.本发明还提供了前文所述的仿生多功能传感器在制造机器人、人机交互以及健康监测中的应用,例如可将所述的传感器与信号收集单元、显示单元、可穿戴辅助设备等连接组装。
49.与现有技术相比,本发明提供的方法非常简单、高重复性和可全机械化生产,具有经济、耗时少的特点。同时,该柔性传感器的各方面的感知功能表现俱佳。本发明实施例制备传感器的步骤简单,自动化程度高,尽可能避免一些手动操作,使得产品重复性好。此外,本发明制备的热电薄膜和铜薄膜采用磁控溅射的方式沉积,使得热电薄膜和导电薄膜的厚度可控,还可将薄膜沉积在其他大部分衬底上,包括聚碳酸酯pc、聚酯pet、聚酰亚胺pi以及滤纸等。同时,由于其他制备过程采用了自动打印、激光刻蚀等,使得该方法可以高效、经济、环保地制备传感器,为多功能传感器的研究铺平了产业化和实用化的前提和保障。
50.为了进一步说明本发明的技术方案,下面结合实施例对本发明优选的实施方案进行说明描述,但是应当理解,这些描述只是为了进一步说明本发明的特征和优点,而不是对本发明的限制。
51.实施例1:
52.a1)如图1所示,其为本实施例的多功能传感器模型。在柔性多孔尼龙薄膜上通过磁控溅射和掩模板沉积一层碲化锑薄膜阵列,碲化锑薄膜厚度为450nm,塞贝克因子为111μv/k。
53.a2)在单个碲化锑薄膜旁边沉积一层75nm厚的铜薄膜,并与碲化锑薄膜部分重叠形成u形结构;本实施例的碲化锑热电薄膜和铜薄膜的结构尺寸如图2所示。
54.a3)将聚二甲基硅氧烷(pdms)基体和固化剂以质量分数10:1的配比混合后,灌入模具中,60℃固化4小时后形成较薄的柔性衬底。
55.a4)利用激光加工设备在柔性衬底上刻蚀一系列倾斜的槽子,槽子的长为4mm,深度为0.7mm,宽度为0.04mm,倾角为57.5
°
。
56.a5)将刻有槽子的pdms衬底放在3-氨丙基三乙氧基硅烷的乙醇溶液中,浸泡过夜,取出干燥,然后在槽子附近打印液态金属线路,形成柔性电路板;
57.a6)将碲化锑薄膜和铜薄膜阵列裁剪成单个u形单元,插入柔性衬底的槽子上,并确保与液态金属线路连接良好,最后将器件用pdms封装好。
58.衬底的厚度为2mm,尼龙薄膜的孔径0.1μm,其为商业直接购买的薄膜,液态金属质量配比为镓68.5%:铟21.5%,锡10%,固化剂为道康宁公司的硫化剂,u型单元一个传感器只有一个。
59.对所得的多功能传感器测试感知热源靠近、压力循环、目标物体温度、风速以及高频振动等方面能力,得到如图3-8所示的测试结果。
60.图3为本发明实施例1制备的多功能传感器对热源靠近距离的感知曲线;具体测试过程为:将一个40℃的平板热源从传感器“毛发”部分(u型结构悬空一端)的正上方(热源平行于传感器的衬底部分)逐渐靠近,并测量不同距离时传感器的输出电压。从图3可见,随着热源逐渐靠近传感器,感应电压逐渐上升,最远可以探测25cm的距离。
61.图4为本发明实施例1制备的多功能传感器对压力循环的电阻响应曲线;具体测试过程为:将传感器用力学疲劳机循环压缩传感器的“毛发”尖端部分,同样力学试验机的力学平板,平行于衬底部分向下压,压缩距离为3mm。从图4可知,该传感器压缩循环25万次后,初始电阻变化很小,电阻变化幅度也很小,说明性能基本不变。
62.图5为本发明实施例1制备的多功能传感器对目标物体温度的电压响应曲线;具体测试过程为:将不同温度的物体刚好贴在传感器“毛发”部分的尖端,收集传感器产生的电
压信号。从图5可知,其探测范围为-189~150℃。
63.图6为本发明实施例1制备的多功能传感器对前向风不同风速的电阻响应曲线;具体测试过程为:将鼓风机放在传感器前方不同距离,来测试不同风速下传感器的电阻变化情况。从图6可知,该方向上的探测范围为2~20.4m/s。
64.图7为本发明实施例1制备的多功能传感器对背向风不同风速的电阻响应曲线;具体测试过程为:将鼓风机放在传感器后方不同距离,来测试不同风速下传感器的电阻变化情况。从图7可知,该方向上的探测范围为1~8.6m/s。
65.图8为本发明实施例1制备的多功能传感器对高频震动的电流响应曲线;具体测试过程为:将音箱表面包覆一层pe保鲜膜,将其贴在传感器的尖端部分,当音箱启动后,音波会带动保鲜膜的震动,从而传导给传感器来收集电学信号。从图8可知,传感器可以探测1000hz的高频震动。
66.本发明实施例公开了一种仿生多功能传感器的制备方法,首先在柔性多孔薄膜上通过掩模板分别沉积一层碲化物热电材料和铜电极,然后将柔性可拉伸的衬底上通过激光刻蚀等成一系列斜角的槽子,随后在刻蚀大量槽子的衬底上打印液态金属导电线路,最后将含有热电材料的多孔薄膜插入衬底上,与液态金属线路连通并且封装好,得到所述多功能的传感器。
67.实验结果表明,采用本发明制备的仿生多功能传感器,在可探测距离25cm的40℃热源,还有-189~150℃的目标物体温度,以及1~20.4m/s的风速探测范围和1000hz的高频震动感应等。同时,对这些信号的感知具有卓越的表现。所述方法制备的仿生多功能传感器在机器人、人机交互以及健康监测等方面有广泛的应用前景。与现有技术相比,本发明提供的方法非常简单、高重复性和可全机械化生产,具有经济、耗时少的特点。同时该柔性传感器的各方面的感知功能表现俱佳,这将在人机界面、仿生机器人等领域展现巨大的应用前景。
68.以上所述的实施例仅是对本发明的优选方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1