一种高温气冷堆包覆颗粒的密度检测装置的制作方法
1.本发明涉及高温气冷堆燃料元件制造技术领域,特别涉及一种高温气冷堆包覆颗粒的密度检测装置。
背景技术:
2.高温气冷堆是用氦气为冷却剂,石墨为反射层材料,中子慢化材料和燃料元件结构材料的先进堆型。包覆燃料颗粒的质量对于高温气冷堆安全运行起着重要作用,包覆颗粒从内向外依次包括疏松热解碳层、内致密热解碳层、碳化硅层和外致密热解碳层等多层,各层密度直接关系到反应堆的安全运行,因此准确、及时地在线检测包覆颗粒各层密度,是核燃料领域的一个重要研究方向。
3.包覆颗粒密度的测定可采用重液悬浮法,重液悬浮法是根据固体颗粒悬浮在液体中时,二者密度相同的原理测量包覆颗粒各层密度。测量时,选用两种不同且已知密度的溶液,分别称为重液ρ重和轻液ρ轻,两种溶液能相互均匀混合而不改变体积,且不和被测样品发生化学反应。测量时,先将包覆颗粒的各层样品取少量放入样品管底部,用精密移液器往样品管里滴定重液和轻液,并调整两者的比例,振荡、静置后观察被测样品在溶液中的状态,当被测悬浮于溶液中,且没有出现附着管壁、管底和团聚现象时,即达到滴定终点。此时,被测样品达到悬浮状态,存在:
4.f
浮
=g
样
5.f
浮
=ρ
液
·g·v排
6.g
样
=ρ
样
·g·v样
[0007]v排
=v
样
[0008]
综合以上式子,有:
[0009][0010]
因此,根据滴加的重液和轻液的体积,就可以换算出被测样品的密度。
[0011]
目前,在实际包覆颗粒密度检测应用中还处于人工滴定测量阶段,生产效率低,存在作业安全隐患,为此急需一种在线自动化的解决方案和装置。
技术实现要素:
[0012]
本发明提供了一种高温气冷堆包覆颗粒的密度检测装置,采用自动化机构实现包覆颗粒各层密度检测流程的有机试剂的自动移取、滴加、震荡混匀、废液倾倒及试管清洗等动作;采用工业相机观测包覆颗粒的悬浮状态,通过检测网络模型判定悬浮结果,直到达到标定状态范围;系统根据所加有机试剂密度及试剂容量,计算并换算成包覆颗粒的密度值。
[0013]
高温气冷堆包覆颗粒的密度检测装置,包括样品管,还包括上料单元、初步滴定单元、补充滴定单元、下料单元;所述下料单元下方还设置有清洁单元,下料单元可下降至清洁单元内部;
[0014]
所述初步滴定单元包括滴定平移模组,所述滴定移动模组上设置有移动滴定台,移动滴定台上开设有放置样品管的试管槽,在所述移动滴定台的一侧设置有滴定机构,滴定机构上安装有多个初步滴定头,所述多个初步滴定头位于移动滴定台的上方;所述初步滴定头的进液端连接于移液管路;
[0015]
所述补充滴定单元包括涡旋混匀仪、工业相机和多个补充滴定头,所述工业相机设置在涡旋混匀仪侧面,且镜头对准所述涡旋混匀仪的样品管放置处,所述多个补充滴定头可移动地设置在涡旋混匀仪上方;所述补充滴定头的进液端连接于移液管路;
[0016]
所述机架的顶端设置有样品周转单元,所述样品周转单元包括组合模组和移动夹具,移动夹具设置在组合模组上,负责完成样品管在各个单元之间的转移。
[0017]
进一步的,所述装置还包括试剂供应单元,所述试剂供应单元包括多个试剂瓶,多个试剂瓶通过移液管路分别连接于初步滴定单元和补充滴定单元;所述移液管路上设置有注射泵。
[0018]
进一步的,所述装置包括分两层设置的机架,所述清洁单元设置在机架的下层;所述上料单元、初步滴定单元、补充滴定单元、下料单元设置在机架的下层。
[0019]
进一步的,所述上料单元包括固定设置的定位块,还包括用于放置样品管的上料样品架,所述上料样品架放置于定位块限定的区域内。
[0020]
进一步的,所述初步滴定单元中,移动滴定台上的试管槽沿移动滴定台运动方向均布,所述滴定机构上设置有三个初步滴定头,所述三个初步滴定头沿移动滴定台运动方向均布,且初步滴定头均布的间距与试管槽之间的间距相同;所述滴定机构还包括第一气缸、固定板、移液管路;所述第一气缸的一端连接于固定板,三个初步滴定头固定于固定板上。
[0021]
进一步的,所述补充滴定单元中,所述涡旋混匀仪上方设置有移动机械手,移动机械手安装于机架侧壁,所述补充滴定头设置在移动机械手上;所述涡旋混匀仪设有两排放置样品管的试管槽,所述两排试管槽之间设有灯箱;所述涡旋混匀仪还包括泡沫架,泡沫架上开设有与涡旋混匀仪的试管槽相对应的定位孔。
[0022]
所述移动机械手上并排设置有三个第二气缸,所述三个第二气缸分别连接设置有一个补充滴定头。
[0023]
进一步的,所述补充滴定单元包括两台涡旋混匀仪,所述每台涡旋混匀仪对样品管的容纳量和移动滴定台的容纳量相同。
[0024]
进一步的,所述下料单元包括下料样品架、托板和夹紧机构;所述夹紧机构设置在下料样品架上方,用于夹紧样品管;所述下料样品架放置在托板上。
[0025]
进一步的,所述清洁单元包括升降机构、旋转机构、喷淋头、清洗剂供应系统;
[0026]
所述旋转机构安装于升降机构上,旋转机构包括电机、一端与电机连接的旋转轴,所述旋转轴的另一端连接于所述托板;所述升降机构带动下料样品架下移,移至喷淋头下方;所述旋转轴带动下料样品架旋转,倾倒废液;
[0027]
所述喷淋头连接有伸缩机构,可在水平方向进行伸缩移动;所述喷淋头上设置有若干个呈阵列排布的针头,针头的排布与下料样品架中样品管的排布相对应;所述喷淋头的进液端连接于清洗剂供应系统。
[0028]
进一步的,所述工业相机连接于主控系统,工业相机将拍摄的图像传输至主控系
统,所述主控系统对图像进行识别检测;主控系统使用训练好的检测网络模型识别样品是否滴定完成,对未完成滴定的样品,主控系统发出指令,控制初步滴定头对未完成滴定的样品再次进行滴定;
[0029]
对完成滴定的样品,根据其滴定所消耗的试剂量计算出该样品的密度;
[0030]
所述检测网络模型包括人工神经网络、卷积神经网络、rbf神经网络、bp神经网络、yolo网络中的任意一种。
[0031]
相比于现有技术,本发明实现了高温气冷堆包覆颗粒密度的批量、自动检测,各工序分布合理,无冗余动作和节拍瓶颈,检测采用专业相机,采集效率高。
[0032]
检测过程中振荡、静置、图像采集一体化设计,最大限度地减小了机构空间,使整个设备更为紧凑;化零为整的批量化振荡充分地利用了涡旋混匀仪等仪器,同时大大缩短了单个样品管逐一振荡的耗时,提高了作业效率;双工位作业模式,可以交替为两台涡旋混匀仪上的样品管补充滴定,实现了移动机械手的最大化利用,减小了关键设备闲置率。
[0033]
本装置将主要的作业单元均集中在上层的操作平台上,这样可以保证滴定、振荡、静置和图像采集等关键作业工序的作业稳定性;将样品周转单元和移动机械手安装在顶部或侧面机架上,这样可充分借助空间优势,方面样品管的取放和滴定,既优化了物流顺序,避免了过渡干涉,又大大降低了结构复杂程度,使设备更为紧凑。
[0034]
本装置采用集中式样品管清洁单元,整个系统采取下沉式结构,集中式清洗,可以保证清洗时试剂及清洗液不会洒落在工作台面上,保证操作区的清洁卫生;本系统的清洗区有集中收集系统和废液收集接口,废液回收接口与用户的储存器或特殊下水相连,方便废液的收集和处理,安全环保。样品管可自动从下料单元转移到清洁单元进行清洗,清洁单元可实现一次性清洗大批量样品管,清洗效率极高。
[0035]
本系统安装有防护外罩,顶部安装有废气回收接口,可以与用户的现场通风设备联通,及时排除试剂的挥发性有毒有害气体,避免扩散至周边环境。
附图说明
[0036]
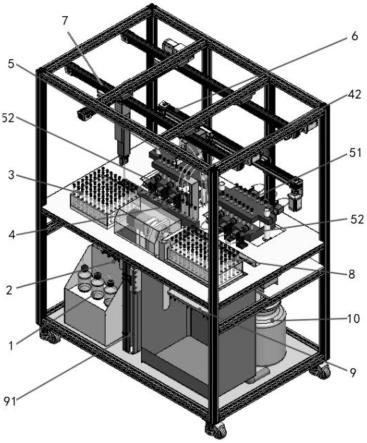
图1为本发明高温气冷堆包覆颗粒的密度检测装置结构示意图;
[0037]
图2为本发明组合模组和移动夹具的结构示意图;
[0038]
图3为本发明上料单元结构示意图;
[0039]
图4为本发明初步滴定单元结构示意图;
[0040]
图5为本发明初步滴定单元的滴定机构结构示意图;
[0041]
图6为本发明补充滴定单元结构示意图;
[0042]
图7为本发明补充滴定单元的涡旋混匀仪结构示意图;
[0043]
图8为本发明补充滴定单元的移动机械手结构示意图;
[0044]
图9为本发明夹紧机构的结构示意图;
[0045]
图10为本发明下料单元的结构示意图;
[0046]
图11为本发明清洁单元的结构示意图;
[0047]
图12为本发明清洁单元的喷淋头结构示意图。
[0048]
符号说明:1-试剂瓶,2-注射泵,3-上料单元,31-上料样品架,32-定位块,4-初步滴定单元,41-滴定平移模组,42-移动滴定台,43-滴定机构,431-第一气缸,432-固定板,
433-初步滴定头,434-移液管路,5-补充滴定单元,51-涡旋混匀仪(511-涡旋混匀仪a,512-涡旋混匀仪b),52-工业相机,53-补充步滴定头,54-灯箱,6-移动机械手,61-第二气缸,7-组合模组,71-x轴模组,72-y轴模组,73-z轴模组,74-移动夹具,8-下料样品架,81-夹紧机构,811-板件,812-气动夹爪,813-夹爪手指,82-托板,9-清洁单元,91-升降机构,92-旋转机构,93-喷淋头,94-废液回收接口,10-清洗剂供应系统,11-样品管。
具体实施方式
[0049]
如图1所示,本发明提供的高温气冷堆包覆颗粒的密度检测装置,包括样品管,还包括分两层设置的机架,所述机架的下层设置有试剂供应单元、清洁单元;机架的上层设置有上料单元、初步滴定单元、补充滴定单元、下料单元;机架上层的顶端设置有样品周转单元,样品周转单元包括组合模组和移动夹具,移动夹具设置在组合模组上,负责完成样品管在各个单元之间的转移。
[0050]
组合模组由三个直线模组搭建而成,如图2所示,y轴模组安装在x轴模组之上,z轴模组安装在y轴模组上,z轴模组上安装有移动夹具,移动夹具采用气动抓手,三个模组互相配合,使移动夹具可以沿x、y、z轴方向运动,从而转移样品管。
[0051]
试剂供应单元包括三个试剂瓶,三个试剂瓶盛装的的试剂分别为异丁醇、三溴甲烷和二碘甲烷,三个试剂瓶通过移液管路分别连接于初步滴定单元和补充滴定单元,移液管路具体选用聚四氟乙烯材料、特氟龙涂层或耐受所用三种有机试剂的材料。初步滴定单元和补充滴定单元各有三个滴定头,每个滴定头连接一根移液管路,一共有六根移液管路,每根移液管路上都设置有一个高精度微量注射泵,分别为六个滴定头提供试剂,本方案具体选用hamilton的psd/6型高精度微量注射泵。
[0052]
如图3所示,上料单元包括固定设置的定位块,和放置样品管的上料样品架,样品架包括上下两部分,下面底座部分采用聚四氟乙烯材质,上面支撑板部分采用耐受所用试剂的透明轻质材料,可以方便观察样品管,上下部按阵列分布有定位孔,供样品管定位用。上料样品架放置于定位块限定的位置内。本实施例中有四个定位块,对应上料样品架的四角,上料样品架即放置在四个定位块所构成的矩形区域中。
[0053]
移动夹具将上料样品架中的样品管依次转移至初步滴定单元。初步滴定是根据事先配置信息(即根据样品信息,设置样品管位置、类型、编号以及样品所匹配的重液和轻液信息,并设定好初步加液试剂种类和添加试剂量),系统控制移液器向样品管中加入定量的轻液和重液的过程。
[0054]
如图4所示,初步滴定单元包括滴定平移模组,滴定移动模组上设置有移动滴定台,移动滴定台上开设有放置样品管的试管槽,试管槽沿移动滴定台运动方向均布;在滴定移动台的一侧设置有滴定机构,如图5所示,滴定机构上包括第一气缸、固定板、移液管路;第一气缸的一端连接于固定板,三个初步滴定头固定于固定板上,使三个初步滴定头位于滴定移动台的上方,并沿移动滴定台运动方向均布;三个初步滴定头的进液端通过移液管路分别连接于三个试剂瓶;初步滴定头均布的间距与试管槽之间的间距相同。
[0055]
滴定平移模组带动移动滴定台步进运行,每次运行相邻样品管的间距,移动夹具将样品管依次移送到试管槽内(试管槽向前运动,移动夹具每次将样品管送到同一位置),同时初步滴定头对到达其下方的样品管进行滴定。相邻滴定头的间距与转移台上相邻样品
管间距一致,因此转移台每移动一个间距,可同步完成两只管的轻液或重液滴定。
[0056]
待移动滴定台上的样品管均完成了初步滴定,移动夹具将所有样品管转移至补充滴定单元。补充滴定则是多次添加试剂的滴定过程,每次滴定后据需要经过振荡静置、视觉采样、结果判定并再次滴定的过程,直到达到包覆颗粒达到理想悬浮状态(滴定终点即未出现附着管壁、管底或团聚等异常现象)后即完成滴定过程。
[0057]
如图6所示,补充滴定单元包括涡旋混匀仪(涡旋混匀仪包括泡沫架)、工业相机和多个补充滴定头,涡旋混匀仪设有两排放置样品管的试管槽,涡旋混匀仪用于给样品管提供振荡源,加速包覆颗粒和有机试剂之间的混合。如图7所示,两排试管槽之间设有灯箱,提供光源,方便进行图像采集;工业相机设置在涡旋混匀仪侧面且镜头对准所述涡旋混匀仪的样品管放置处,采集图像,具体的,本实施例的工业相机采用2d面阵相机;
[0058]
涡旋混匀仪上方设置有移动机械手,如图8所示,所述补充滴定头设置在移动机械手上;移动机械手上并排设置有三个第二气缸,所述三个第二气缸分别连接设置有一个补充滴定头,三个补充滴定头的进液端通过移液管路分别连接于三个试剂瓶;作业时,移动机械手首先将对应的滴定头移至待滴定样品管正上方,第二气缸驱动补充滴定头下行,将补充滴定头插入到样品管内,然后完成滴定。
[0059]
因为补充滴定速度明显慢于初步滴定,所以本方案设计的补充滴定单元包括两台涡旋混匀仪,每台涡旋混匀仪对样品管的容纳量和移动滴定台的容纳量相同,即补充滴定工位的容量为初步滴定工位的两倍。
[0060]
为了缩短整体作业时间,本方案尽可能让多工序并行处理,可以充分利用移动夹具、移动机械手等关键装置,提高设备利用率。
[0061]
具体的,移动夹具往移动滴定台上放置样品管,每放置一根样品管,转移台便往前步进平移一根管的间隔距离,初步滴定头便同时往其下方的样品管进行初步滴定,此时上料和初步滴定同步进行。
[0062]
当移动夹具往涡旋混匀仪a上转移完全部样品管时,涡旋混匀仪a就开始振荡、静置和图像采集,与此同时,移动夹具继续往另一台涡旋混匀仪b上转移样品管。待涡旋混匀仪b进入振荡、静置和图像采集过程时,补充滴定工位的移动机械手开始给涡旋混匀仪a上的样品管进行第一次补充滴定,待涡旋混匀仪a滴定结束,涡旋混匀仪b已完成上述动作,补充滴定机械手又开始给涡旋混匀仪b上的样品管进行第一次补充滴定,如此交替同步进行。
[0063]
工业相机设置有多台,每台观测三只样品管,相机连接于主控系统,将拍摄的图像传输至主控系统,所述主控系统对图像进行识别检测;主控系统使用训练好的检测网络模型识别样品是否滴定完成,检测网络模型可采用人工神经网络、卷积神经网络、rbf神经网络、bp神经网络、yolo网络中的任意一种。
[0064]
已进行初步滴定的样品管插入涡旋混匀仪后进行震荡、静置,然后工业相机对准样品管进行图像采集、识别检测,对未完成滴定的样品,主控系统发出指令,控制补充滴定头对未完成滴定的样品再次进行滴定,每次滴定只用一种试剂,主控系统根据图像识别结果(如颗粒沉底或漂浮于上层等现象)指定下次滴定所用的试剂,并控制对应的滴定头,如此反复进行滴定、识别检测,直至样品达到理想悬浮状态。每次滴定要间隔一定时间,使样品充分震荡、静置,保证采集图像的准确性;对完成滴定的样品,根据其滴定所消耗的试剂量计算出该样品的密度。若某样品经过多次(如5次)补充滴定仍未达到滴定终点,可以转由
人工进行滴定。
[0065]
检测完成的样品管被移动夹具移送至下料单元。
[0066]
如图9所示,下料单元包括下料样品架、托板和夹紧机构;夹紧机构设置在下料样品架上方,用于夹紧每一根样品管;下料样品架放置在托板上。
[0067]
如图10所示,夹紧机构采用两块分布着有腰圆孔的板件,两块板件互相重叠,样品管从腰圆孔中插入,两块板件的侧边设置有一个气动夹爪,气动夹爪的一端安装在托板上,另一端即夹爪手指固定于板件,气动夹爪的两个夹爪手指一长一短,长夹爪手指与上层的板件连接固定,短夹爪手指与下层的板件连接固定,夹爪进行闭合运动时,带动两个板件相向运动,将样品管夹住;板件上的腰圆孔与样品管相接触的弧面覆有防滑材料。
[0068]
清洁单元包括升降机构、旋转机构、喷淋头、清洗剂供应系统;
[0069]
如图11所示,旋转机构安装于升降机构上,旋转机构包括电机、一端与电机连接的旋转轴,旋转轴的另一端连接于托板;升降机构带动下料样品架下移,从上层移至清洁单元的喷淋头下方;旋转轴带动下料样品架旋转(180
°
),倾倒废液;
[0070]
清洁单元还包括用于分隔喷淋区域的仓体,升降机构安装在仓体侧壁,旋转机构的电机部分则设置在仓体外侧,避免被清洗剂沾湿;仓体侧壁上开设有进出口,进出口外侧设置有伸缩机构,伸缩机构连接于仓体内的喷淋头,控制其伸缩进出从而避开下料样品架的上下运动;具体的,在下料样品架下降时,喷淋头被伸缩机构带动着缩回(从进出口缩回),避开下料样品架,然后伸缩机构再带动喷淋头伸进,移到下料样品架的上方进行喷淋工作。
[0071]
如图12所示,喷淋头上设置有若干个呈阵列排布的针头,针头的排布与下料样品架中样品管的排布相对应,实现了一次性往多只样品管同时加注乙醇,清洗效率高;喷淋头的进液端连接于清洗剂供应系统(乙醇桶),具体采用乙醇作为清洗剂,乙醇桶上配置有酒精泵。
[0072]
所有清洗动作在底部清洗仓内完成,清洗后的包覆颗粒和有机试剂经废液回收接口排放至废液储存器或特殊下水,便于存储和处理,避免环境污染。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1