一种全局路径规划方法、装置、设备以及存储介质与流程
本发明涉及自动驾驶,尤其涉及一种全局路径规划方法、一种全局路径规划装置、一种电子设备以及一种计算机可读存储介质。
背景技术:
1、自动驾驶车辆应用场景可分为低速场景及高速场景,低速场景包含园区和停车场等非结构化道路,高速场景则包含城市道路道路及高速公路等非结构化道路。随着其应用领域逐渐扩展,自动驾驶技术需要兼容上述两类场景以满足更多需求。
2、全局路径规划基于高精度地图,接收任务指令规划一条由当前位置经过全部任务点到达终点的全局路径,用于指导下层局部路径规划。一种同时适用于结构化及非结构化道路的全局路径规划算法能够从上层统一两类场景的接口,为后续功能拓展奠定了良好的基础。
3、现有的结构化全局路径规划方法主要用于车辆导航,首先基于路网拓扑结构建立有向图,再应用图搜索算法生成由起点到达终点的道路序列,常用算法包括图搜索算法和蚁群算法等优化算法。现有的非结构化全局路径规划方法主要适用于机器人在存在障碍物的环境中寻找一条无碰撞的路点序列,常用算法包含采样算法和维诺图等势场法。
4、结构化全局路径规划算法需要基于有向图规划,而非结构化道路不存在确定的拓扑和方向,而且导航算法不考虑车辆的动力学约束,不满足非结构化道路车辆循迹的需求。非结构化全局路径规划算法没有利用结构化道路的拓扑结构,非常消耗时间及空间资源,同样不适用于结构化道路的全局路径规划。因此,难以同时解决两类场景的全局路径规划问题。
技术实现思路
1、本发明的目的是针对现有技术的缺陷,提供一种全局路径规划方法、装置、设备以及存储介质,该方法可在非结构化区域中规划出行驶路线,然后将规划出的行驶路线以及结构化区域中的行驶路线作为全局路径规划,解决了现有技术中无法在非结构化区域与结构化区域的混合区域中进行全局路径规划的问题。
2、第一方面,为实现上述目的,本发明提供了一种全局路径规划方法,所述方法包括:
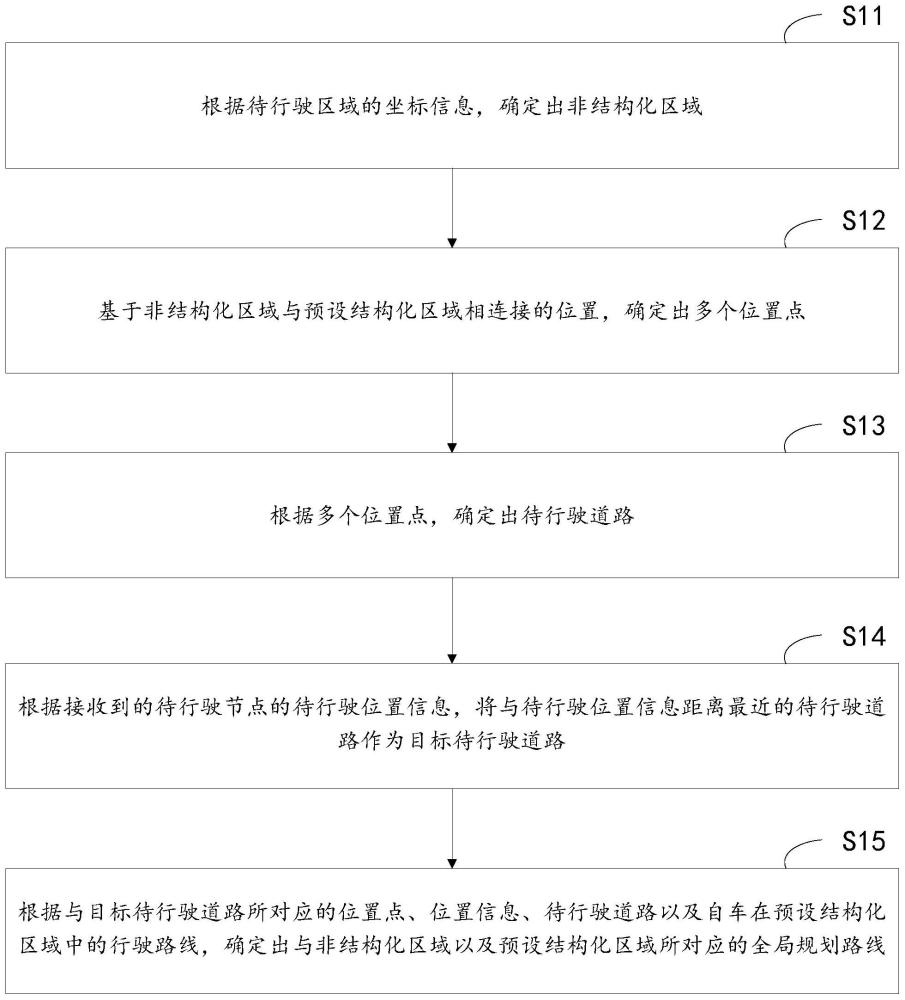
3、根据待行驶区域的坐标信息,确定出非结构化区域;
4、基于所述非结构化区域与预设结构化区域相连接的位置,确定出多个位置点;
5、根据所述多个位置点,确定出待行驶道路;
6、根据接收到的待行驶节点的待行驶位置信息,将与所述待行驶位置信息距离最近的待行驶道路作为目标待行驶道路;
7、根据与所述目标待行驶道路所对应的位置点、所述位置信息、所述待行驶道路以及自车在所述预设结构化区域中的行驶路线,确定出与所述非结构化区域以及所述预设结构化区域所对应的全局规划路线。
8、进一步的,所述根据待行驶区域的坐标信息,判断所述待行驶区域是否为非结构化区域,包括:
9、获取所述待行驶区域边缘的坐标信息;
10、将不属于预设地图信息中所包括的坐标信息,作为目标坐标信息;
11、将所述目标坐标信息所确定的区域作为非结构化区域
12、进一步的,所述基于所述非结构化区域与预设结构化区域相连接的位置,确定出多个位置点,包括:
13、将所述非结构化区域与预设结构化区域相连接的位置所对应的点,作为出口或者入口;
14、将与所述非结构化区域的中间位置所对应的点,作为中间点;
15、将所述出口、所述入口以及所述中间点分别作为所述位置点。
16、进一步的,所述根据所述多个位置点,确定出待行驶道路,包括:
17、分别将所述出口与所述中间点、以及所述中间点与所述入口之间所形成的道路作为所述待行驶道路。
18、进一步的,所述根据接收到的待行驶节点的待行驶位置信息,将与所述待行驶位置信息距离最近的待行驶道路作为目标待行驶道路,包括:
19、从所述待行驶位置信息分别向每一待行驶道路做垂线;
20、将与所述垂线距离最短时所对应的待行驶道路作为目标行驶道路。
21、进一步的,所述根据与所述目标待行驶道路所对应的位置点、所述位置信息、所述待行驶道路以及自车在所述预设结构化区域中的行驶路线,确定出与所述非结构化区域以及所述预设结构化区域所对应的全局规划路线,包括:
22、当与所述目标待行驶道路所对应的位置点为出口和入口时,将所述入口与所述位置信息,以及所述位置信息与所述出口之间的道路所形成的路线图作为中间规划路线;
23、将自车在所述预设结构化区域中的行驶路线与所述中间规划路线所行程的路线,作为所述全局规划路线。
24、进一步的,所述根据与所述目标待行驶道路所对应的位置点、所述位置信息、所述待行驶道路以及自车在所述预设结构化区域中的行驶路线,确定出与所述非结构化区域以及所述预设结构化区域所对应的全局规划路线,包括:
25、当与所述目标待行驶道路所对应的位置点为入口和位置信息所确定的点时,将所述入口与所述位置信息所确定的点之间的道路,以及所述位置信息所确定的点与所述出口之间的道路,所形成的路线图作为中间规划路线;
26、将自车在所述预设结构化区域中的行驶路线与所述中间规划路线所行程的路线,作为所述全局规划路线。
27、第二方面,本发明实施例提供一种全局路径规划装置,所述装置包括:
28、确定模块,用于根据待行驶区域的坐标信息,确定出非结构化区域;基于所述非结构化区域与预设结构化区域相连接的位置,确定出多个位置点;根据所述多个位置点,确定出待行驶道路;
29、目标模块,用于根据接收到的待行驶节点的待行驶位置信息,将与所述待行驶位置信息距离最近的待行驶道路作为目标待行驶道路;
30、规划模块,用于根据与所述目标待行驶道路所对应的位置点、所述位置信息、所述待行驶道路以及自车在所述预设结构化区域中的行驶路线,确定出与所述非结构化区域以及所述预设结构化区域所对应的全局规划路线。
31、第三方面,本发明实施例提供一种电子设备,包括:
32、一个或多个处理器;和
33、其上存储有指令的一个或多个机器可读介质;
34、当所述指令由所述一个或多个处理器执行时,使得所述处理器执行上述的全局路径规划方法。
35、第四方面,本发明实施例提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述的全局路径规划方法。
36、可见,本发明实施例提供的一种全局路径规划方法,可在非结构化区域内,根据位置点、行驶道路规划出非结构区域内的路径。再根据非结构区域内的路径以及结构化区域内的路径形成全局规划路线。使用该方法可在非结构化区域与结构化区域的混合区域中进行全局路径规划。
技术特征:
1.一种全局路径规划方法,其特征在于,所述方法包括:
2.如权利要求1所述的方法,其特征在于,所述根据待行驶区域的坐标信息,判断所述待行驶区域是否为非结构化区域,包括:
3.如权利要求1所述的方法,其特征在于,所述基于所述非结构化区域与预设结构化区域相连接的位置,确定出多个位置点,包括:
4.如权利要求3所述的方法,其特征在于,所述根据所述多个位置点,确定出待行驶道路,包括:
5.如权利要求4所述的方法,其特征在于,所述根据接收到的待行驶节点的待行驶位置信息,将与所述待行驶位置信息距离最近的待行驶道路作为目标待行驶道路,包括:
6.如权利要求4所述的方法,其特征在于,所述根据与所述目标待行驶道路所对应的位置点、所述位置信息、所述待行驶道路以及自车在所述预设结构化区域中的行驶路线,确定出与所述非结构化区域以及所述预设结构化区域所对应的全局规划路线,包括:
7.如权利要求4所述的方法,其特征在于,所述根据与所述目标待行驶道路所对应的位置点、所述位置信息、所述待行驶道路以及自车在所述预设结构化区域中的行驶路线,确定出与所述非结构化区域以及所述预设结构化区域所对应的全局规划路线,包括:
8.一种全局路径规划装置,执行权利要求1-7任一所述的全局路径规划方法,其特征在于,所述装置包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,其上存储有计算机程序,该程序被处理器执行时实现如权利要求1-7任一项所述的全局路径规划方法。
技术总结
本发明涉及一种全局路径规划方法、装置、设备以及存储介质,该方法包括:根据待行驶区域的坐标信息,确定出非结构化区域;基于非结构化区域与预设结构化区域相连接的位置,确定出多个位置点;根据多个位置点,确定出待行驶道路;根据接收到的待行驶节点的待行驶位置信息,将与待行驶位置信息距离最近的待行驶道路作为目标待行驶道路;根据与目标待行驶道路所对应的位置点、位置信息、待行驶道路以及自车在预设结构化区域中的行驶路线,确定出与非结构化区域以及预设结构化区域所对应的全局规划路线。解决了现有技术中无法在非结构化区域与结构化区域的混合区域中进行全局路径规划的问题。
技术研发人员:张双琳
受保护的技术使用者:北京智行者科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!