定位方法及装置与流程
本技术实施例涉及计算机技术中的可见光定位领域,尤其涉及一种定位方法及装置。
背景技术:
1、近年来,随着led(light emitting diode,发光二极管)在照明领域的逐渐普及,可见光定位的发展也取得了很大的进步
2、目前,现有技术中在实现可见光定位的时候,通常是将利用每个led发出的标签信号,之后终端设备接收led发出的标签信号,确定当前位置在该led的覆盖法范围内,以实现定位。
3、然而,上述介绍的实现方式的定位精度取决于灯具布设的密度,因此定位精度较低。
技术实现思路
1、本技术实施例提供一种定位方法及装置,解决可见光定位在光源较少、反射、遮挡、盲区等场景下定位精度差的问题,提高终端定位的精度、可用性以及抗干扰能力。
2、第一方面,本技术实施例提供一种定位方法,包括:
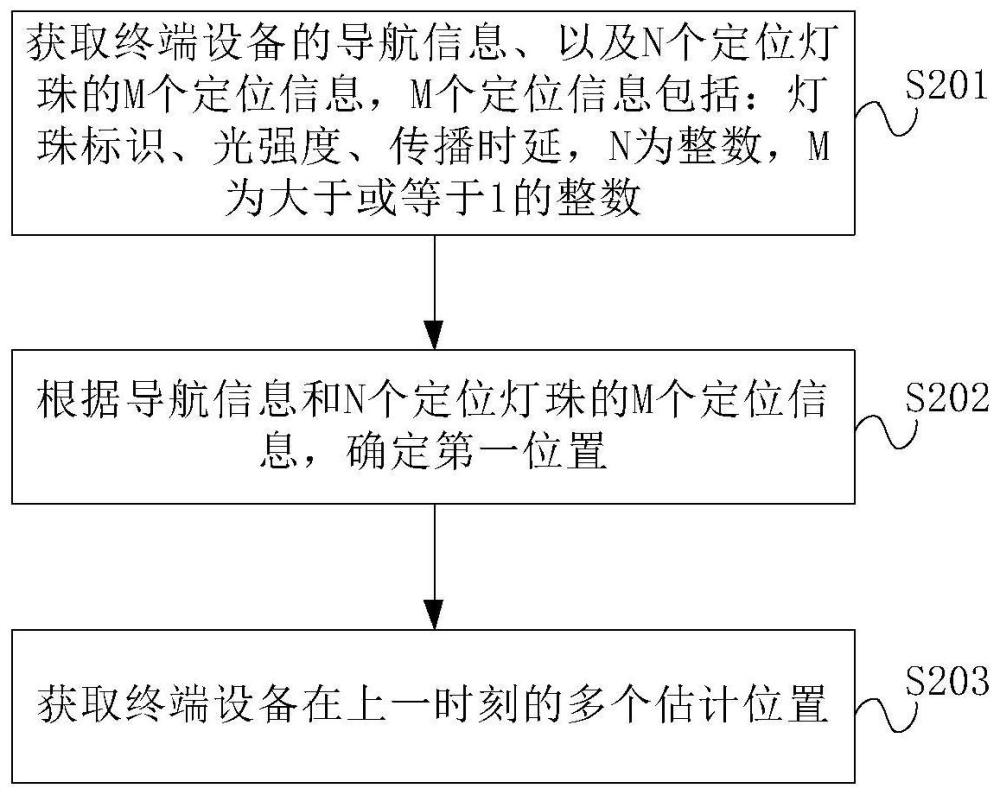
3、获取所述终端设备的导航信息、以及n个定位灯珠的m个定位信息,所述m个定位信息包括:灯珠标识、光强度、传播时延,所述n为整数,所述m为大于或等于1的整数;
4、根据所述导航信息和所述n个定位灯珠的m个定位信息,确定第一位置;
5、获取所述终端设备在上一时刻的多个估计位置;
6、根据所述第一位置和所述多个估计位置,确定所述终端设备的目标位置。
7、在一种可能的设计中,根据所述导航信息和所述n个定位灯珠的m个定位信息,确定第一位置,包括:
8、根据所述导航信息,确定第一待选位置;
9、根据所述n个定位灯珠的m个定位信息,确定m个第二待选位置;
10、根据所述第一待选位置和所述m个第二待选位置,确定所述第一位置。
11、在一种可能的设计中,根据所述第一位置和所述多个估计位置,确定所述终端设备的目标位置,包括:
12、根据所述第一位置以及所述定位灯珠的数量n,获取所述多个估计位置各自对应的误差;
13、将所述多个估计位置中误差最小的位置确定为所述目标位置。
14、在一种可能的设计中,所述第一位置中包括所述第一待选位置和所述m个第二待选位置;
15、针对任一个所述估计位置,所述根据所述第一位置以及所述定位灯珠的数量n,获取所述多个估计位置各自对应的误差,包括:
16、根据所述数量n,确定所述第一待选位置的权重和所述m个第二待选位置中各待选位置的权重;
17、根据所述第一待选位置、所述m个第二待选位置、所述第一待选位置的权重、所述m个第二待选位置中各待选位置的权重以及所述估计位置,确定所述估计位置对应的误差。
18、在一种可能的设计中,所述根据所述第一待选位置、所述m个第二待选位置、所述第一待选位置的权重、所述m个第二待选位置中各待选位置的权重以及所述估计位置,确定所述估计位置对应的误差,包括:
19、根据所述第一待选位置和所述估计位置,确定所述第一待选位置和所述估计位置之间的第一误差;
20、根据所述m个第二待选位置和所述估计位置,确定所述估计位置和所述m个第二待选位置之间的m个第二误差;
21、对所述第一误差、所述第一待选位置的权重,以及各所述第二误差,各所述待选位置的权重,进行加权平均处理,得到所述估计位置对应的误差。
22、在一种可能的设计中,根据所述数量n,确定所述第一待选位置的权重和所述m个第二待选位置中各待选位置的权重,包括:
23、所述n为0时,所述第一待选位置的权重为最大值,所述m个第二待选位置中各待选位置的权重均为最小值;
24、所述n大于0时,所述第一待选位置的权重和所述n成反比,所述m个第二待选位置中,灯珠标识对应的待选位置的权重和所述n成反比例关系,光强度和传播时延对应的待选位置的权重和所述n成正比例关系。
25、在一种可能的设计中,所述获取所述终端设备在上一时刻的多个估计位置之前,所述方法包括:
26、所述终端设备在所述上一时刻,根据所述终端设备在所述上一时刻的设备信息进行最大似然估计,确定多个估计位置,所述设备信息包括如下至少一种:速度、加速度、移动方向、所述上一时刻的定位位置、所述定位位置的置信度。
27、第二方面,本技术实施例提供一种定位装置,包括:
28、获取模块,用于获取所述终端设备的导航信息、以及n个定位灯珠的m个定位信息,所述m个定位信息包括:灯珠标识、光强度、传播时延,所述n为整数,所述m为大于或等于1的整数;
29、确定模块,用于根据所述导航信息和所述n个定位灯珠的m个定位信息,确定第一位置;
30、所述获取模块,还用于获取所述终端设备在上一时刻的多个估计位置;
31、所述确定模块,还用于根据所述第一位置和所述多个估计位置,确定所述终端设备的目标位置。
32、在一种可能的设计中,所述确定模块具体用于:
33、根据所述导航信息,确定第一待选位置;
34、根据所述n个定位灯珠的m个定位信息,确定m个第二待选位置;
35、根据所述第一待选位置和所述m个第二待选位置,确定所述第一位置。
36、在一种可能的设计中,所述确定模块具体用于:
37、根据所述第一位置以及所述定位灯珠的数量n,获取所述多个估计位置各自对应的误差;
38、将所述多个估计位置中误差最小的位置确定为所述目标位置。
39、在一种可能的设计中,所述第一位置中包括所述第一待选位置和所述m个第二待选位置;
40、针对任一个所述估计位置,所述确定模块具体用于:
41、根据所述数量n,确定所述第一待选位置的权重和所述m个第二待选位置中各待选位置的权重;
42、根据所述第一待选位置、所述m个第二待选位置、所述第一待选位置的权重、所述m个第二待选位置中各待选位置的权重以及所述估计位置,确定所述估计位置对应的误差。
43、在一种可能的设计中,所述确定模块具体用于:根据所述第一待选位置和所述估计位置,确定所述第一待选位置和所述估计位置之间的第一误差;
44、根据所述m个第二待选位置和所述估计位置,确定所述估计位置和所述m个第二待选位置之间的m个第二误差;
45、对所述第一误差、所述第一待选位置的权重,以及各所述第二误差,各所述待选位置的权重,进行加权平均处理,得到所述估计位置对应的误差。
46、在一种可能的设计中,所述确定模块具体用于:
47、所述n为0时,所述第一待选位置的权重为最大值,所述m个第二待选位置中各待选位置的权重均为最小值;
48、所述n大于0时,所述第一待选位置的权重和所述n成反比,所述m个第二待选位置中,灯珠标识对应的待选位置的权重和所述n成反比例关系,光强度和传播时延对应的待选位置的权重和所述n成正比例关系。
49、在一种可能的设计中,所述确定模块还用于:
50、在所述获取所述终端设备在上一时刻的多个估计位置之前,所述终端设备在所述上一时刻,根据所述终端设备在所述上一时刻的设备信息进行最大似然估计,确定多个估计位置,所述设备信息包括如下至少一种:速度、加速度、移动方向、所述上一时刻的定位位置、所述定位位置的置信度。
51、第三方面,本技术实施例提供一种定位设备,包括:
52、存储器,用于存储程序;
53、处理器,用于执行所述存储器存储的所述程序,当所述程序被执行时,所述处理器用于执行如上第一方面以及第一方面各种可能的设计中任一所述的方法。
54、第四方面,本技术实施例提供一种计算机可读存储介质,包括指令,当其在计算机上运行时,使得计算机执行如上第一方面以及第一方面各种可能的设计中任一所述的方法。
55、第五方面,本技术实施例提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上第一方面以及第一方面各种可能的设计中任一所述的方法。
56、本技术实施例提供一种定位方法及装置,该方法包括:获取终端设备的导航信息、以及n个定位灯珠的m个定位信息,m个定位信息包括:灯珠标识、光强度、传播时延,n为整数,m为大于或等于1的整数。根据导航信息和n个定位灯珠的m个定位信息,确定第一位置。获取终端设备在上一时刻的多个估计位置。根据第一位置和多个估计位置,确定终端设备的目标位置。通过获取终端设备的导航信息,以及各个定位灯珠的定位信息,之后基于导航信息和定位信息进行加权处理,以确定终端设备的第一位置,之后根据第一位置,在多个估计位置中确定终端设备的目标位置,从而可以实现参考各种可能的定位信息,以及不依赖可见光的导航信息,来确定终端设备的最终定位位置,以有效的提升终端设备的定位处理的准确性。
- 还没有人留言评论。精彩留言会获得点赞!