建筑材料用尺寸测量工具的制作方法
1.本发明涉及建筑测量器具领域,尤其涉及一种建筑材料用尺寸测量工具。
背景技术:
2.修建寺庙、吊脚楼、旅游区民宿住宅时,圆木常被用作立柱或横梁,因此需要承受较大的负载,所以这类圆木的直径要求比较严格,需要保证整个圆木的直径较为一致,不会出现直径波动较大的情况。因此这类圆木加工完成后,需要对尺寸进行检测,判断不同位置的直径是否一致,进而评判该圆木是否符合要求。
3.公开号为cn109443175a的中国专利公开了一种圆木尺寸检测装置,能用于上述圆木直径的检测。但是该检测装置的使用较为不便,每次检测时都需要先将圆木放置到底座的凹槽中,然后再进行检测,检测后还需将圆木搬走,因此整个检测过程是非常麻烦的,需要来回搬运圆木,一方面工作量较大,另一方面检测的效率也不会太高。因此,有必要设计一种使用更方便,无需来回搬动圆木的测量工具。
技术实现要素:
4.本发明的目的在于提供一种建筑材料用尺寸测量工具,其能够直接卡在圆木的外表面,实现对圆木半径的测量。
5.为实现上述目的,本发明提供了一种建筑材料用尺寸测量工具,其主要用于测量建筑用圆木的外径尺寸,具体包括移动组件、传动机构、电机以及指示件;
6.所述移动组件的数量为两组,两组移动组件均包括一个齿条和一个顶块;两个所述齿条的中轴线的延长线相交于同一点,定义该点为所述测量工具的定位圆心点,两个齿条的中轴线之间的夹角不小于60
°
同时也不大于120
°
,且各齿条仅能沿着自身的中轴线移动;两个所述的顶块分别固定在两个齿条靠近所述定位圆心点的一侧;
7.所述传动机构包括两个齿轮和一组联动构件;两个所述的齿轮分别与两个所述的齿条相啮合,用以驱使齿条沿自身的中轴线移动;所述联动构件用于带动两个所述的齿轮同步旋转,且两个齿轮在联动构件的带动下驱使两个所述的齿条移动时,两个齿条会同时向靠近所述定位圆心点的方向移动或者同时向背离所述定位圆心点的方向移动,且在移动的过程中,两个顶块与所述定位圆心点的距离时刻保持一致;
8.所述压板布置在两个顶块之间;
9.所述同步移动机构将所述压板与两侧的两个顶块相连,当两个顶块移动时,顶块会通过同步移动机构带动压板一起移动,且在移动的过程中,压板与所述定位圆心点的距离时刻与顶块与定位圆心点的距离保持一致;
10.所述电机与所述联动构件相连,其用于驱使联动构件工作,以带动两个所述的齿轮正向或反向旋转;
11.所述指示件能根据所述顶块的位置的变化而发生变化,其能实时示出顶块与所述定位圆心点之间的距离;该指示件可以是电子器件,能通过数字的方式实时显示顶块与定
位圆心点之间的距离,也可以是机械器件,如通过指针配合刻度盘的方式来展示顶块与定位圆心点之间的距离,需人工读取指针的数值。
12.进一步的,两个所述的齿条分别为第一齿条和第二齿条,且第一齿条的中轴线与第二齿条的中轴线之间的夹角为90
°
;两个所述的齿轮分别为第一齿轮和第二齿轮,且第一齿轮与所述第一齿条相啮合,第二齿轮与所述第二齿条相啮合。
13.进一步的,所述联动构件包括第一同步带传动组件和第二同步带传动组件;
14.所述第一同步带传动组件包括第一同步轮、第二同步轮以及第一同步带;所述第一同步轮与所述第一齿轮相对固定,所述第二同步轮位于所述定位圆心点的上方,所述第一同步带环绕在第一同步轮和第二同步轮之间;
15.所述第二同步带传动组件包括第三同步轮、第四同步轮以及第二同步带;所述第三同步轮与第二同步轮相对固定,所述第四同步轮与所述第二齿轮相对固定,所述第二同步带环绕在第三同步轮和第四同步轮之间。
16.进一步的,所述第一同步轮与所述第一齿轮两者同时固定在第一转轴上;
17.所述第二同步轮与所述第三同步轮两者同时固定在第二转轴上;
18.所述第四同步轮与所述第二齿轮两者同时固定在第三转轴上。
19.进一步的,该测量工具还包括连接为一体且可相互分离的上壳体和下壳体;
20.所述的传动机构被包裹在上壳体和下壳体围合而成的腔体之中;
21.所述第一齿条和第二齿条两者的一部分位于上壳体和下壳体围合而成的腔体之中,另一部分分别穿过上壳体和/或下壳体上开设的缺口后延伸至上壳体和下壳体之外;
22.所述各转轴的两端各通过一个轴承分别与上壳体和下壳体相连。
23.进一步的,所述第一齿条的侧壁固定有第一滑块,第一滑块嵌入在第一导向块的第一导向槽中,所述第一导向块固定在所述上壳体或所述下壳体的内壁上;所述第二齿条的侧壁固定有第二滑块,第二滑块嵌入在第二导向块的第二导向槽中,所述第二导向块固定在所述上壳体或所述下壳体的内壁上。
24.进一步的,所述电机通过固定架固定在所述上壳体或所述下壳体的外壁上,电机的输出端固定有驱动齿轮,所述第二转轴的一端固定有从动齿轮,该从动齿轮与所述驱动齿轮相啮合。
25.进一步的,该测量工具还包括电池、电机正转按钮和电机反转按钮;
26.所述电池可拆卸式布置在所述上壳体或所述下壳体的外侧,电池为所述电机的旋转提供电源;
27.所述电机正转按钮和所述电机反转按钮均设置在所述上壳体或所述下壳体的外侧,两者分别用于启动电机使其正转或反转。
28.进一步的,所述指示件包括刻度盘和指针;
29.所述刻度盘固定在所述上壳体和所述下壳体围合而成的腔体之中,且刻度盘与所述第二齿条相互平行且保持有间距,刻度盘的外表面标识有用于表示所述顶块与所述定位圆心点之间的距离的数值;同时,该刻度盘所对应的上壳体或下壳体的区域为透明的;
30.所述指针间隔布置在所述刻度盘的外表面,指针通过一连接杆越过刻度盘后与所述的第二齿条固定。
31.进一步的,两个所述的顶块在靠近所述压板的一侧各设置有一个第一圆孔,且第
一圆孔的轴心线与顶块的移动方向相互垂直;
32.所述压板通过第一伸缩杆与所述上壳体以及所述下壳体相固定,且第一伸缩杆的中轴线的延长线穿过所述的定位圆心点,同时,第一伸缩杆的中轴线与第一齿条或第二齿条的中轴线之间的夹角均为45
°
,所述压板的两侧各设置有一个第二圆孔,且第二圆孔的轴心线与第一伸缩杆的中轴线相互垂直;
33.所述同步移动机构包括两个第二伸缩杆、两个第一活塞杆以及两个第二活塞杆;两个第二伸缩杆均与所述上壳体以及所述下壳体相固定,两个第二伸缩杆分别布置在第一伸缩杆的两侧,且两个第二伸缩杆的中轴线的延长线均穿过所述的定位圆心点,同时,两个第二伸缩杆的中轴线与第一伸缩杆的中轴线之间的夹角均为22.5
°
;两个第一活塞杆的一端分别插入在两个所述顶块的第一圆孔中,另一端则与相邻的第二伸缩杆的端部铰接,且第一活塞杆可沿着第一圆孔的轴心线方向自由移动;两个第二活塞杆的一端分别插入在所述压板的两个第二圆孔中,另一端则与相邻的第二伸缩杆的端部铰接,且第二活塞杆可沿着第二圆孔的轴心线方向自由移动。
34.本发明具有如下有益效果:用手按压电机正转按钮或电机反转按钮时,电机会旋转,电机的旋转会带动整个联动构件工作,联动构件工作又会带动两个齿轮同步旋转,而两个齿轮的同步旋转又能带动两个齿条同步移动,从而两个顶块便会移动,两个顶块移动时会通过同步移动机构带动压板一起移动,因此最终两个顶块以及压板三者会一起移动,因此这三者到定位圆心点的距离会发生变化,同时,由于这三者到定位圆心点的距离又是一致的,所以当两个顶块以及压板都贴合在圆木的表面上时,此时定位圆心点便与圆木的圆心重合,所以顶块到定位圆心点的距离就是圆木的半径,因此通过读取指针在刻度盘上所对应的刻度值便可获得圆木的半径值;因此本发明的测量工具在使用时,可以让圆木不动,然后将测量工具卡在圆木的上表面对圆木的半径进行测量,每测量一次后移动测量工具再在圆木的下一个位置进行测量,最后再比较所有测量的半径值,看其一致性是否符合要求,进而判断圆木是否合格。
附图说明
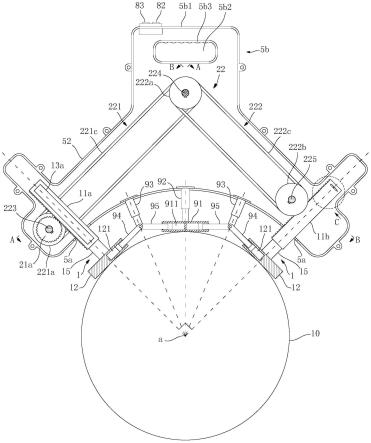
35.图1是本发明实施例的结构示意图;
36.图2是图1中的a-a向视图;
37.图3是图1中的b-b向视图,此图隐藏了指示件的刻度盘;
38.图4是图1中圆形虚线范围内的放大图,此图隐藏了指示件的刻度盘;
39.图5是图1中的c向视图;
40.图6是图5中指示件的左视图。
具体实施方式
41.下面结合具体实施例对本发明进行进一步详细介绍,但本发明的实施方式不限于此。
42.实施例:
43.如图1至图6所示,本发明提供了一种建筑材料用尺寸测量工具,其主要用于测量建筑用圆木的外径尺寸,具体包括上壳体51、下壳体52、移动组件1、传动机构、压板91、同步
移动机构、电机3、指示件4、电池81、电机正转按钮82以及电机反转按钮83。
44.所述上壳体51和所述下壳体52是两个可固定在一起又可相互分离的部件,上壳体51和下壳体52扣合在一起时,两者会围合形成一个腔体,上下壳体51、52的四周均设置有多个耳板5a,且上壳体51的耳板5a与下壳体52的耳板5a是一一对应的。固定上下壳体51、52时,将两个壳体51、52扣合在一起,然后再在各组耳板5a中拧入螺栓将两个壳体51、52的耳板5a锁紧即可;拆分上下壳体51、52时,拧下螺栓后将两个壳体51、52抠开即可。
45.所述移动组件1的数量为两组,两组移动组件1均包括一个齿条和一个顶块12。两个齿条分别为第一齿条11a和第二齿条11b,两个齿条11a、11b的中轴线的延长线相互垂直并相交于同一点(参见图1的两条长虚线),该点为一个虚拟的点,其为测量工具的定位圆心点a,且两个齿条11a、11b仅能沿自身的中轴线方向移动,同时,两个齿条11a、11b远离定位圆心点a的一侧均位于上壳体51和下壳体52围合而成的腔体之中,靠近定位圆心点a的一侧则穿过上壳体51和下壳体52上开设的缺口5a后延伸至上壳体51和下壳体52之外。两个所述的顶块12均位于上壳体51和下壳体52之外,且两个顶块12各通过一个固定杆15固定在两个齿条11a、11b靠近定位圆心点a的一侧,两个顶块12均由橡胶材质制成。
46.所述传动机构被包裹在上壳体51和下壳体52围合而成的腔体中,该传动机构包括两个齿轮和一组联动构件22。两个齿轮分别为第一齿轮21a和第二齿轮21b,其中,第一齿轮21a与所述的第一齿条11a相互啮合,第二齿轮21b与所述的第二齿条11b相互啮合,两个齿轮21a、21b分别用以驱使两个齿条11a、11b沿自身的中轴线移动;所述联动构件22用于带动两个齿轮21a、21b同步旋转,且两个齿轮21a、21b在联动构件22的带动下驱使两个齿条11a、11b移动时,两个齿条11a、11b要么是同时向靠近定位圆心点a的方向移动,要么就是同时向背离定位圆心点a的方向移动,且在移动的过程中,两个顶块12与定位圆心点a的距离时刻保持一致。
47.所述压板91布置在两个顶块12之间,压板91由橡胶材质制成。
48.所述同步移动机构将所述压板91与两侧的两个顶块12相连,当两个顶块12移动时,顶块12会通过同步移动机构带动压板91一起移动,且在移动的过程中,压板91与所述定位圆心点a的距离时刻与顶块12与定位圆心点a的距离保持一致,即,任意时刻,两个顶块12以及压板91三者到定位圆心点a的距离都是一样的。
49.所述电机3与所述联动构件22相连,其用于驱使联动构件22工作,以带动两个齿轮同步正转或同步反转。
50.所述指示件4能根据顶块12的位置的变化而发生变化,其能实时示出顶块12与定位圆心点a之间的距离。
51.所述电池81可拆卸式布置在下壳体52的外侧,电池81用于为电机3的旋转提供电源。
52.所述电机正转按钮82和所述电机反转按钮83均设置在下壳体52的外侧,电机正转按钮82和电机反转按钮83通过控制电路(图中未示出)与电机3、电池81相连,电机正转按钮82用于启动电机3使其正转,电机反转按钮83则用于启动电机3使其反转。此处的电机正转按钮82和电机反转按钮83的控制电路属于常规设计,因此本文不做过多的阐述。
53.上述联动构件22的具体结构以及布置方式如下:
54.所述联动构件22包括第一同步带传动组件221和第二同步带传动组件222;
55.参见图1和图2,所述第一同步带传动组件221包括第一同步轮221a、第二同步轮221b以及第一同步带221c;第一同步轮221a与第一齿轮21a均固定在第一转轴223上(参见图2),第二同步轮221b位于定位圆心点a的上方,第一同步带221c环绕在第一同步轮221a和第二同步轮221b之间;
56.参见图1和图3,所述第二同步带传动组件222包括第三同步轮222a、第四同步轮222b以及第二同步带222c;第三同步轮222a与第二同步轮221b均固定第二转轴224上(参见图2和图3),第四同步轮222b与第二齿轮21b均固定在第三转轴225上(参见图3),第二同步带222c环绕在第三同步轮222a和第四同步轮222b之间;
57.其中,第一同步带传动组件221位于下壳体52一侧的腔体中(参见图2),第二同步带传动组件222位于上壳体51一侧的腔体中(参见图3);
58.同时,参见图1,第一同步带传动组件221的布置方向与第二同步带传动组件222的布置方向在空间上相互垂直,即,第一同步带221c与第二同步带222c投影在下壳体52的底面上时,两者是相互垂直的;
59.上述三个转轴223、224、225的一端通过一个轴承226连接在上壳体51的壁面上,另一端则通过另一个轴承226连接在下壳体52的壁面上,即,各转轴223、224、225可以借助两个轴承226在上下壳体51、52之间自由旋转;优选的,各转轴223、224、225与上壳体51的轴承226的连接方式均采用可拆卸式的插拔连接,这样的好处是:当需要拆开上下壳体51、52对内部进行检查或维修时,拧下耳板5a处的螺栓后,抠开上壳体51,然后将上壳体51用力向上提便能使上壳体51的轴承226与相应的转轴223、224、225分离,从而使上壳体51能顺利被拆下。
60.为了对各齿条11a、11b、11c的移动方向进行限制,本实施例还做了如下设计:
61.参见图2,第一齿条11a的侧壁固定有第一滑块13a,第一滑块13a嵌入在第一导向块14a的第一导向槽14a1中,第一导向块14a则固定在上壳体51的内壁上;
62.参见图3,第二齿条11b的侧壁固定有第二滑块13b,第二滑块13b嵌入在第二导向块14b的第二导向槽14b1中,第二导向块14b则固定在下壳体52的内壁上。
63.另外,参见图2和图3,所述电机3的输出端固定有一个驱动齿轮71,所述第二转轴224的一端伸出至下壳体52之外并与一个从动齿轮72相连,该从动齿轮72与所述的驱动齿轮71相啮合。其中,为了达到减速的目的,从动齿轮72的齿数远大于驱动齿轮71的齿数,两者的齿数比通常介于3:1至4:1之间。由此,当电机3转动时,会通过驱动齿轮71带动从动齿轮72旋转,从动齿轮72的旋转又会带动第二转轴224旋转,从而整个联动构件22便会开始工作,同步移动机构22工作则会带动两个齿轮21a、21b同步旋转,而两个齿轮21a、21b的同步旋转又能带动两个齿条11a、11b同步移动,从而便可改变两个顶块12到定位圆心点a的距离。当电机3的旋转方向改变时,两个齿条11a、11b的移动方向也会随之改变,本实施例中,当电机3正转时,两个齿条11a、11b会同步向靠近定位圆心点a的方向移动,当电机3反转时,两个齿条11a、11b会同步向远离定位圆心点a的方向移动。
64.关于所述的压板91以及所述的同步移动机构,具体结构如下:
65.参见图1,两个所述的顶块12在靠近所述压板91的一侧各设置有一个第一圆孔121,且第一圆孔121的轴心线与顶块12的移动方向相互垂直,也即,第一圆孔121的轴心线与相应齿条11a、11b的中轴线是相互垂直的;
66.所述压板91通过第一伸缩杆92与所述上壳体51以及所述下壳体52相固定,且第一伸缩杆92的中轴线的延长线穿过所述的定位圆心点a,同时,第一伸缩杆92的中轴线与第一齿条11a的中轴线之间的夹角为45
°
,与第二齿条11b的中轴线之间的夹角也为45
°
;压板91的两侧各设置有一个第二圆孔911,且第二圆孔911的轴心线与第一伸缩杆92的中轴线相互垂直,压板91到定位圆心点a的距离与顶块12到定位圆心点a的距离一致;
67.所述同步移动机构包括两个第二伸缩杆93、两个第一活塞杆94以及两个第二活塞杆95;两个第二伸缩杆93均与所述上壳体51以及所述下壳体52相固定,两个第二伸缩杆93分别布置在第一伸缩杆92的两侧,且两个第二伸缩杆93的中轴线的延长线均穿过所述的定位圆心点a,同时,任意一个第二伸缩杆93的中轴线与第一伸缩杆92的中轴线之间的夹角均为22.5
°
;两个第一活塞杆94的一端分别插入在两个顶块12的第一圆孔121中,另一端则与相邻的第二伸缩杆93的端部铰接,且第一活塞杆94可沿着第一圆孔121的轴心线方向自由移动;两个第二活塞杆95的一端分别插入在压板91的两个第二圆孔911中,另一端则与相邻的第二伸缩杆93的端部铰接,且第二活塞杆95可沿着第二圆孔911的轴心线方向自由移动;其中,第一活塞杆94与第二活塞杆95铰接于第二伸缩杆93上的同一点,且该铰接点的转动圆心位于第二伸缩杆93的中轴线上;另外,第一活塞杆94和第二活塞杆95远离铰接点的一端均设置有一个活塞套(图中未标号),以便于活塞杆94、95在相应圆孔121、911中移动;
68.所述第一伸缩杆92和所述第二伸缩杆93均包括粗杆段和细杆段,细杆段可缩回至粗杆段之中或者从粗杆段中伸出,其中,两个伸缩杆92、93均是粗杆段与上下壳体51、52固定,细杆段则向远离上下壳体51、52的方向延伸,参见图1;
69.上壳体51和下壳体52上均开设有卡槽(图中未示出),以便第一伸缩杆92和第二伸缩杆93的粗杆段的尾部卡入其中;这样,当上下壳体51、52扣合在一起时,第一伸缩杆92和第二伸缩杆93刚好卡在上下壳体51、52的衔接处,然后可以通过螺钉将第一伸缩杆92和第二伸缩杆93的粗杆段与上下壳体51、52固定;上述第一伸缩杆92和第二伸缩杆93的固定方式属于较为常规的固定方式,因此仅以文字阐述,在说明书附图中没有提供更详细的图片进行展示。
70.基于上述压板91以及同步移动机构的结构可知,当两个顶块12向靠近定位圆心点a的方向移动时,由于第一活塞杆94会随着顶块12一起移动,而第一活塞杆94又是与第二伸缩杆93铰接的,因此两个第二伸缩杆93会伸长,第二伸缩杆93伸长时会带动第二活塞杆95以及压板91一起向靠近定位圆心点a的方向移动,同时由于第二伸缩杆93与相邻的齿条11a、11b或第一伸缩杆92的夹角均为22.5
°
(即位于两者的对称轴上),因此在第二伸缩杆93的限制下,顶块12和压板91在相同时间内的移动距离是一致的,所以最终会看到两个顶块12以及压板91三者会同步向靠近定位圆心点a的方向移动,且相同时间内三者的移动距离是一致的。反之,当两个顶块12向远离定位圆心点a的方向移动时,压板91也会同步向远离定位圆心点a的方向移动,且相同时间内的移动距离与顶块12是一致的。上述过程中,当顶块12向靠近定位圆心点a的方向移动时,第一活塞杆94会向第一圆孔121中缩回,第二活塞杆95会向第二圆孔911中缩回,当顶块12向远离定位圆心点a的方向移动时,第一活塞杆94会从第一圆孔121中向外伸出,第二活塞杆95会从第二圆孔911中向外伸出。
71.所述电机3通过一个固定架61固定在所述下壳体52的外壁上,所述电池81可拆卸式安装在所述的固定架61之中。所述电机3、驱动齿轮71以及从动齿轮72被包覆在一个外壳
62中,该外壳62与所述的下壳体52固定。
72.其中,所述上壳体51与所述下壳体52的上侧还形成一个握持部5b,以便使用时操作人员能用手握持住整个测量工具。该握持部5b包括一个把手5b1,把手5b1的下方形成有便于手部插入的开口5b2,开口5b2的上方在把手5b1的下侧形成有便于手部握稳的凹凸结构5b3,把手5b1的左右两侧与上壳体51或下壳体52的主体部分相连。该把手5b1由两半组成,其中一半连接在下壳体52的主体部分上(即如图1所示),属于下壳体52的一部分,另一半连接在上壳体51的主体部分上(图中未示出),属于上壳体51的一部分;
73.参见图1,所述的电机正转按钮82和电机反转按钮83均设置在所述把手5b1的侧上方,以便手握在凹凸结构5b3处时能方便的触及到两个按钮。另外,参见图2和图3,在所述外壳62的外壁上还设置有一个线盒63,电机正反转按钮82、83与电机3、电池81之间的相关连线(如电源线、信号线)沿着所述的线盒63布线,并被藏匿在线盒63之中。
74.使用测量工具时,操作人员用手插入所述的开口5b2,然后握住把手5b1,便能方便地提起整个测量工具,同时,用拇指还能很方便的按压到电机正转按钮82或电机反转按钮83,以控制顶块12的移动。
75.另外,参见图4、图5和图6,所述指示件4包括刻度盘41和指针42。所述刻度盘41位于所述上壳体51与所述下壳体52围合而成的腔体中且与下壳体52的内壁固定,同时,刻度盘41与所述的第二齿条11b相互平行且两者保持有间距,刻度盘41的外表面标识有用于表示所述顶块12与所述定位圆心点a之间的距离的数值(参见图6),刻度盘41的中间开设有一条与第二齿条11b的移动方向一致的开槽411(参见图6),同时,上壳体51在与刻度盘41对应的位置采用一块透明板511封闭(参见图5),以便从上壳体51的外侧观察到内部的指针42和刻度。所述指针42间隔布置在刻度盘41的外表面,指针42的底部连接有一连接杆43,该连接杆43穿过所述刻度盘41的开槽411后与第二齿条11b的侧壁固定。
76.本实施例的测量工具,其使用方法及工作原理如下:
77.需要测量圆木10的外径时,操作人员首先需要按动电机反转按钮83,使两个顶块12以及压板91移动至距离定位圆心点a较远的位置;
78.之后,操作人员用手握在把手5b1处,将测量工具提起后移动至圆木10的上方;然后让测量工具下移,使测量工具包覆在圆木10的上侧,同时让压板91贴紧在圆木10的顶部;
79.随后,用手按压电机正转按钮82,让两个顶块12以及压板91向靠近定位圆心点a的方向移动,此过程中,需要下压整个测量工具,让压板91始终与圆木10的外表面贴合;之后,直到两个顶块12也与圆木10的外表面贴合时,松开电机正转按钮82,然后观察指针42在刻度盘41上所对应的刻度值,便能得到圆木10的半径;
80.之后,用手按压电机反转按钮83,让两个顶块12以及压板91向远离定位圆心点a的方向移动,不再与圆木10的外表面贴合,随后将测量工具提起后移动至下一个测量点,继续之前的步骤,测量该测量点处的圆木10半径;
81.随后,每间隔一定距离测量一次圆木10的半径,直至整个圆木10的多个测量点均测量完成;最后,比较各个测量点的半径值,便能得到圆木10半径的变动情况,进而判断该圆木10的圆度是否符合要求。
82.上述测量过程中,当两个顶块12以及压板91都贴在圆木10的外表面上时,定位圆心点a便与测量处的圆木10的圆心是重合的,所以顶块12到定位圆心点a的距离就是圆木10
的半径。
83.由于本实施例利用的是三点确定一个圆的原理,因此在测量圆木10的半径时,需要注意两个顶块12以及压板91都要同时贴在圆木10的外表面上才行,如果只有两个顶块12贴在圆木10的外表面上,而压板91没有与圆木10贴合的话,那么定位圆心点a与圆木10的圆心就没有重合,所以测量的值并不是实际的半径值。因此,通常为了确保压板91能与圆木10顺利贴合,在测量时,顶块12移动之前,就要先让压板91贴在圆木10的外壁上,之后各顶块12向内移动时,还需向下压住压板91使其始终与圆木10贴合,这样,当两侧的顶块12移动至与圆木10贴合时,压板91也是与圆木10贴合的。
84.本实施例的测量工具不仅可以用于成型圆木的外径检测,也可用于圆木母料的外径检测。我们知道成型圆木是在圆木母料的基础上加工出来的,圆木母料则是指伐木后去除枝干后还包含有树皮的木料,为了便于加工出最终的成型料,在挑选圆木母料时,就需要挑选出直径较为统一的母料,这样加工时才能减少材料的浪费,同时也能方便工人的加工,节省加工时间。因此,在挑选这类圆木母料时,也可使用本实施例的测量工具。
85.由于圆木通常是放置在地面上的,因此采用本实施例的测量工具对其半径进行测量时,仅需沿着圆木多取几个测量点进行测量即可,无需搬动圆木,相比公开号为cn109443175a的中国专利而言,本专利使用时会更方便一些,无需来回搬动圆木,测量的效率也更高。
86.由于圆木放置在地面上时,其底部是与地面接触的,同时圆木的中部有时候会被埋在泥土中或者被其他物体遮挡,导致无法作为采样点,所以本实施例的测量工具可以只选取圆木的上半部分进行采样,让两个顶块12以及一个压板91贴合在圆木的上半部分以获取三个采样点,从而达到三点确定一个圆,让测量工具的定位圆心点a与圆木的圆心重合的目的,进而通过顶块12所处的位置来间接测算出圆木的半径。假若圆木的右侧被其他物体遮挡时,本实施例也可以选取圆木的左侧进行采样,进而测出半径,同理,假若圆木的左侧被其他物体遮挡时,本实施例则可以选取圆木的右侧进行采样。
87.另外,圆木的同轴度可以依据肉眼观测或者采用其他工具检测,本发明主要用于判断圆木外径的波动范围是否符合要求。
88.另外,本实施例中,也可以在两个顶块12朝向定位圆心点a的一侧各设置一个锥头(图中未示出),同时,在压板91朝向定位圆心点a的一侧也设置一个锥头(图中未示出),锥头的尖端朝向定位圆心点a,以用于与圆木的外表面接触,并且,三个锥头的尖端与定位圆心点a的距离时刻保持一致;锥头的尖端与圆木的外表面接触时为点接触,当三个锥头的尖端均与圆木的外表面接触时,便实现了利用三点确定一个圆的原理来测定圆木的半径。
89.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1