物体方位识别方法与物体方位识别装置与流程
1.本揭示涉及一种物体方位识别方法与物体方位识别装置。
背景技术:
2.使用雷达装置来测量雷达装置与障碍物之间的距离在使用上越来越普及。例如,雷达装置可发射无线信号至障碍物并接收由此障碍物反射回来的无线信号。然后,可通过计算无线信号在雷达装置与障碍物之间的飞行时间来评估雷达装置与障碍物之间的距离。但是,在障碍物的方位识别上,当雷达装置与障碍物两者同时处于移动状态且障碍物的移动状态不同于雷达装置的移动状态时,如何使用雷达装置来准确识别两者之间的相对方位(例如识别移动中的障碍物当前位于雷达装置的右前方30度角处),实为相关技术领域的研究人员所致力的课题之一。
技术实现要素:
3.有鉴于此,本揭示提供一种物体方位识别方法与物体方位识别装置,可有效识别同时处于移动状态的物体方位识别装置与目标物之间的相对方位。
4.本揭示的实施例提供一种物体方位识别方法,适用于包含无线信号收发器的物体方位识别装置,所述物体方位识别装置与目标物皆处于移动状态,且所述方法包括:由所述无线信号收发器持续发射第一信号;由所述无线信号收发器接收所述目标物反射回来的第二信号;对所述第一信号与所述第二信号执行信号前处理以获得所述目标物相对于所述物体方位识别装置的移动信息;将所述移动信息输入至深度学习模型,以取得所述目标物相对于所述物体方位识别装置的方位信息;以及依据所述方位信息识别所述物体方位识别装置与所述目标物之间的相对方位。
5.在本揭示的一实施例中,移动信息包括于移动中同一时间点物体方位识别装置与目标物之间的距离。
6.在本揭示的一实施例中,对第一信号与第二信号执行信号前处理以获得移动信息的步骤包括:对第一信号及第二信号执行一维傅里叶转换,以取得所述距离。
7.在本揭示的一实施例中,方位信息包括深度学习模型所预测的目标物在当前时间点的位置与物体方位识别装置在前一单位时间点与前二单位时间点之间的多个预测距离。
8.在本揭示的一实施例中,依据方位信息识别物体方位识别装置与目标物之间的相对方位的步骤包括:基于目标物在当前时间点的位置与物体方位识别装置在当前时间点的位置之间的距离、以及所述多個预测距离识别物体方位识别装置与目标物之间的相对方位。
9.在本揭示的一实施例中,移动信息还包括物体方位识别装置与目标物之间的相对移动速度。
10.在本揭示的一实施例中,对第一信号与第二信号执行信号前处理以获得移动信息的步骤包括:对第一信号及第二信号执行二维傅里叶转换,以取得相对移动速度。
11.在本揭示的一实施例中,方位信息包括深度学习模型所预测的目标物在当前时间点的位置。
12.在本揭示的一实施例中,深度模型包括长短期存储模型。
13.本揭示的实施例另提供一种物体方位识别装置,用以识别所述物体方位识别装置与目标物之间的相对方位,所述物体方位识别装置与所述目标物皆处于移动状态。所述物体方位识别装置包括无线信号收发器与处理器。所述无线信号收发器用以持续发射第一信号并接收所述目标物反射回来的第二信号。所述处理器耦接至所述无线信号收发器。所述处理器用以:对所述第一信号与所述第二信号执行信号前处理以获得所述目标物相对于所述物体方位识别装置的移动信息;将所述移动信息输入至深度学习模型,以取得所述目标物相对于所述物体方位识别装置的方位信息;以及依据所述方位信息识别所述物体方位识别装置与所述目标物之间的相对方位。
14.在本揭示的一实施例中,移动信息包括于移动中同一时间点物体方位识别装置与目标物之间的距离。
15.在本揭示的一实施例中,对第一信号与第二信号执行信号前处理以获得移动信息的操作包括:对第一信号及第二信号执行一维傅里叶转换,以取得所述多個距离。
16.在本揭示的一实施例中,方位信息包括深度学习模型所预测的物体方位识别装置在当前时间点的位置与目标物在前一单位时间点与前二单位实间点的位置之间的多个预测距离。
17.在本揭示的一实施例中,移动信息还包括物体方位识别装置与目标物之间的一相对移动速度。
18.在本揭示的一实施例中,对第一信号与第二信号执行信号前处理以获得移动信息的操作包括:对第一信号及第二信号执行二维傅里叶转换,以取得移动信息中的相对移动速度。
19.在本揭示的一实施例中,方位信息包括深度学习模型所预测的目标物在当前时间点的位置。
20.基于上述,即便物体方位识别装置仅包含单一个无线信号收发器,物体方位识别装置仍旧可有效识别同时处于移动状态的物体方位识别装置与目标物之间的相对方位。
附图说明
21.图1是根据本揭示的一实施例所示出的物体方位识别装置的示意图。
22.图2是根据本揭示的一实施例所示出的测量物体方位识别装置与之间的距离的示意图。
23.图3是根据本揭示的一实施例所示出的预测物体方位识别装置与目标物之间的距离的示意图。
24.图4是根据本揭示的一实施例所示出的对目标物进行定位的示意图。
25.图5是根据本揭示的一实施例所示出的识别物体方位识别装置与目标物之间的相对方位的示意图。
26.图6是根据本揭示的一实施例所示出的物体方位识别方法的流程图。
27.附图标记说明:
28.11:物体方位识别装置
29.111:无线信号收发器
30.112:存储电路
31.113:处理器
32.114:深度学习模型
33.12:目标物
34.101、102:无线信号
35.103、501:方向
36.201(t1)~201(t3)、202(t1)~202(t3):位置
37.夹角θ
38.d1~d3、d31,d32:距离
39.r1~r3:半径
40.401~403:圆
41.s601~s605:步骤
具体实施方式
42.图1是根据本揭示的一实施例所示出的物体方位识别装置的示意图。请参照图1,在一实施例中,物体方位识别装置11可配置于任意脚踏车、机车、小客车、大客车或卡车等各式交通工具上,物体方位识别装置11可配置于智能手机、头戴式显示器等各式便携式电子装置上。在一实施例中,物体方位识别装置11可配置于专用的物体方位测量装置上。
43.当物体方位识别装置11与目标物12皆处于移动状态(即物体方位识别装置11与目标物12皆非静止不动)时,物体方位识别装置11持续发射无线信号(亦称为第一信号)101至目标物12并接收目标物12反射回来的无线信号(亦称为第二信号)102。例如,无线信号102可用以表示受到目标物12反射的无线信号101。物体方位识别装置11可根据无线信号101与102来识别皆处于移动状态的物体方位识别装置11与目标物12之间的相对方位。例如,此相对方位可通过目标物12的所在方向与方向103之间的夹角θ来表示。例如,方向103可为物体方位识别装置11的法向量方向(即行进方向)或其他可作为方向的评估标准的一个基准方向。
44.在一实施例中,物体方位识别装置11包括无线信号收发器111、存储电路112及处理器113。无线信号收发器111可用以发射无线信号101并接收无线信号102。例如,无线信号收发器111可包括天线元件及射频前端电路等无线信号的收发电路。在一实施例中,无线信号收发器111可包括雷达装置,例如毫米波雷达装置,且无线信号101(与102)包括连续雷达波信号。在一实施例中,无线信号101与102之间的波形变化或波形差异可反映物体方位识别装置11与目标物12之间的距离。
45.存储电路112用以存储数据。例如,存储电路112可包括挥发性存储电路与非挥发性存储电路。挥发性存储电路用以挥发性地存储数据。例如,挥发性存储电路可包括随机存取存储器(randomaccess memory,ram)或类似的挥发性存储媒体。非挥发性存储电路用以非挥发性地存储数据。例如,非挥发性存储电路可包括只读存储器(read only memory,rom)、固态硬盘(solid state disk,ssd)及/或传统硬盘(hard disk drive,hdd)或类似的
非挥发性存储媒体。
46.处理器113耦接至无线信号收发器111与存储电路112。处理器13用以负责物体方位识别装置11的整体或部分运行。例如,处理器113可包括中央处理单元(central processing unit,cpu)、图形处理器(graphics processing unit,gpu)、或是其他可程序化的一般用途或特殊用途的微处理器、数字信号处理器(digital signal processor,dsp)、可程序化控制器、特殊应用集成电路(application specific integrated circuits,asic)、可程序化逻辑装置(programmable logic device,pld)或其他类似装置或这些装置的组合。
47.在一实施例中,物体方位识别装置11还可包括全球卫星定位系统(global positioning system,gps)定位器、网络接口卡、电源供应器等各式电子电路。例如,gps定位器用以提供物体方位识别装置11的所在位置的信息。网络接口卡用以提供物体方位识别装置11连线至网际网络的功能。电源供应器用以提供电源至物体方位识别装置11。
48.在一实施例中,存储电路112可用以存储深度学习模型114。深度学习模型114亦称为人工智能(artificial intelligence,ai)模型或(类)神经网络(neural network)模型。在一实施例中,深度学习模型114是以软件模块的形式存储于存储电路112中。然而,在另一实施例中,深度学习模型114亦可实作为硬件电路,本揭示不加以限制。深度学习模型114可经训练以提高对特定信息的预测准确度。例如,在对深度学习模型114的训练阶段,训练数据集可被输入至深度学习模型114,而根据深度学习模型114的输出,深度学习模型114的决策逻辑(例如演算法规则及/或权重参数)可被调整,以提高深度学习模型114对特定信息的预测准确度。
49.在一实施例中,假设物体方位识别装置11当前处于移动状态(亦称为第一移动状态)且目标物12当前也处于移动状态(亦称为第二移动状态)。须注意的是,第一移动状态可不同于第二移动状态。例如,物体方位识别装置11在实体空间中的移动方向可不同于目标物12在实体空间中的移动方向及/或物体方位识别装置11在实体空间中的移动速度可不同于目标物12在实体空间中的移动速度。
50.在一实施例中,处于第一移动状态的物体方位识别装置11可经由无线信号收发器111持续发射无线信号101,并经由无线信号收发器111持续接收无线信号102。
51.在一实施例中,处理器113可对无线信号101与102执行信号前处理以获得目标物12相对于物体方位识别装置11的移动信息。例如,处理器113可对无线信号101与102执行傅里叶转换(fourier transform)等信号处理操作,以获得所述移动信息。例如,所述傅里叶转换可包括一维傅里叶转换及/或二维傅里叶转换。
52.在一实施例中,所述移动信息可包括物体方位识别装置11与目标物12之间的距离及/或物体方位识别装置11与目标物12之间的相对移动速度,且不限于此。在一实施例中,所述移动信息还可包括其他可用以评估物体方位识别装置11与目标物12之间的空间状态、空间状态的变化及/或相对移动状态的各式物理量的评估信息。
53.在一实施例中,处理器113可使用深度学习模型114来分析所述移动信息。例如,处理器113可将所述移动信息输入至深度学习模型114,以取得目标物12相对于物体方位识别装置11的方位信息。然后,处理器113可根据所述方位信息识别物体方位识别装置11与目标物12之间的相对方位(例如图1的夹角θ的信息)。
54.图2是根据本揭示的一实施例所示出的测量处于物体方位识别装置与目标物之间的距离的示意图。请参照图1与图2,假设处于第一移动状态的物体方位识别装置11在时间点t1、t2及t3依序移动至位置201(t1)、201(t2)及201(t3)。其中,时间点t1早于时间点t2,且时间点t2早于时间点t3。另一方面,处于第二移动状态的目标物12在时间点t1、t2及t3依序移动至位置202(t1)、202(t2)及202(t3)。此外,在物体方位识别装置11与目标物12的移动期间(实时间点t1~t3),物体方位识别装置11可持续发射无线信号101并接收从目标物12反射的无线信号102。
55.在一实施例中,处理器113可根据无线信号101与102对距离d1~d3进行测量。距离d1用以表示位置201(t1)与位置202(t1)之间的距离。距离d2用以表示位置201(t2)与位置202(t2)之间的距离。距离d3用以表示位置201(t3)与位置202(t3)之间的距离。在一实施例中,处理器113可对无线信号101与102执行包含一维傅里叶转换的信号前处理,以获得包含距离d1~d3的移动信息。
56.在一实施例中,位置201(t3)亦称为目标物12的当前位置。在一实施例中,时间点t1与t2之间相差一个单位时间,且时间点t2与t3之间也相差一个单位时间。亦即,时间点t1与t3之间可相差两个单位时间。其中,一个单位时间可以是1秒或者其他的时间长度,本发明不加以限制。在一实施例中,时间点t3亦称为当前时间点,时间点t2亦称为时间点t3的前一单位时间点,且时间点t1亦称为时间点t3的前二单位时间点。
57.图3是根据本揭示的一实施例所示出的预测物体方位识别装置与目标物之间的距离的示意图。请参照图3,继续于图2的实施例,处理器113可将包含距离d1~d3的移动信息输入至深度学习模型114进行分析,以获得包含距离d31与d32的方位信息。距离d31用以表示物体方位识别装置11在时间点(亦称为第一时间点)t1的位置201(t1)与目标物12在时间点(亦称为第三时间点)t3的位置202(t3)之间的距离(亦称第一预测距离)。距离d32用以表示物体方位识别装置11在时间点(亦称为第二时间点)t2的位置201(t2)与目标物12在时间点t3的位置202(t3)之间的距离(亦称第二预测距离)。
58.须注意的是,物体方位识别装置11与目标物12在时间点t1~t3皆是处于持续的移动状态,且目标物12的移动方向与移动速度皆不可控(或为未知)。因此,距离d31与d32可由深度学习模型114根据所述移动信息进行预测,但距离d31与d32无法单纯根据无线信号101与102(例如无线信号101与102的波形变化或波形差异)来进行测量。
59.在一实施例中,深度学习模型114包括长短期存储(long short-term memory,lstm)模型等基于时间序列的预测模型。深度学习模型114可根据依序对应于时间点t1~t3的距离d1~d3来预测出距离d31与d32。详细来说,可输入包含大量已知距离d1、d2、d3、d31、d32的训练数据至深度学习模型114,以训练深度学习模型114可以基于距离d1~d3来预测出距离d31与d32。
60.图4是根据本揭示的一实施例所示出的对目标物进行定位的示意图。请参照图4,继续于图3的实施例,处理器113可根据所预测的距离d31与d32以及所测量的距离d3来对目标物12在时间点t3的位置202(t3)进行定位。以三角定位为例,处理器113可将距离d31作为半径r1并以物体方位识别装置11在时间点t1的位置201(t1)为圆心模拟出一个虚拟的圆401,将距离d32作为半径r2并以物体方位识别装置11在时间点t2的位置201(t2)为圆心模拟出一个虚拟的圆402,并将距离d3作为半径r3并以物体方位识别装置11在时间点t3的位
置201(t3)为圆心模拟出一个虚拟的圆403。处理器113可根据圆401~403的交叉处或重叠处决定目标物12在时间点t3的位置202(t3)。例如,所述方位信息可包含处理器113所决定的目标物12在时间点t3的位置202(t3)的信息(例如图5的坐标(x2,y2))。
61.图5是根据本揭示的一实施例所示出的识别物体方位识别装置与目标物之间的相对方位的示意图。请参照图5,继续于图4的实施例,处理器113可根据物体方位识别装置11在时间点t3的位置201(t3)与目标物12在时间点t3的位置202(t3),来获得处于第一移动状态的物体方位识别装置11与处于第二移动状态的目标物12在时间点t3的相对方位。例如,假设位置201(t3)的坐标为(x1,y1)且位置202(t3)的坐标为(x2,y2),则处理器113可根据坐标(x1,y1)与(x2,y2)获得方向501与103之间的夹角θ。其中,方向501从位置201(t3)指向位置202(t3),且方向103为基准方向(例如为物体方位识别装置11的法向量方向)。
62.在一实施例中,处理器113可基于夹角θ来描述处于第一移动状态的物体方位识别装置11与处于第二移动状态的目标物12在时间点t3的相对方位。例如,处理器113可通过文字或语音来呈现“目标物12在物体方位识别装置11的前方偏左θ度”或类似信息。
63.在一实施例中,所述移动信息还可包括物体方位识别装置11与目标物12之间的相对移动速度。例如,处理器113可对无线信号101与102执行包含二维傅里叶转换的信号前处理,以获得物体方位识别装置11与目标物12之间的相对移动速度。
64.在一实施例中,处理器113还可将速度测量信息与位置测量信息加入至所述移动信息中。所述速度测量信息反映物体方位识别装置11在第一移动状态下的移动速度。所述位置测量信息反映物体方位识别装置11在第一移动状态下的测量位置。所述速度测量信息与位置测量信息可由设置于物体方位识别装置11中的至少一感测器获得。例如,所述感测器可包括速度感测器、陀螺仪(gyroscope)、磁感测器(magnetic-field sensor)及加速度计(accelerometer)及gps定位器等等,本揭示不加以限制。处理器113可根据所述感测器的感测结果获得所述速度测量信息与位置测量信息。
65.在一实施例中,深度学习模型114可根据所述移动信息来预测处于第二移动状态下的目标物12的移动轨迹或者处于第二移动状态的目标物12在特定时间点(例如图2的时间点t3)的位置。以图2为例,处理器113可将包含物体方位识别装置11在时间点t1~t3之间的移动速度、位置201(t1)~201(t3)、距离d1~d3及物体方位识别装置11与目标物12之间的相对移动速度的移动信息输入至深度学习模型114。深度学习模型114可根据所述移动信息输出位置预测信息。所述位置预测信息可包含深度学习模型114所预测的处于第二移动状态的目标物12在时间点t3的位置202(t3)(例如图5的坐标(x2,y2))。然后,处理器113可根据位置201(t3)与202(t3),来识别处于第一移动状态的物体方位识别装置11与处于第二移动状态的目标物12在时间点t3的相对方位。例如,处理器113可根据图5中位置201(t3)的坐标(x1,y1)与位置202(t3)的(x2,y2)获得方向501与103之间的夹角θ。相关操作细节已详述于上,在此便不赘述。
66.在一实施例中,在训练阶段,处理器113可将训练数据集输入至深度学习模型114,以对深度学习模型114进行训练。在一实施例中,所述训练数据集可包括距离数据与验证数据。处理器113可根据所述验证数据验证深度学习模型114响应于所述训练数据集中的所述距离数据所输出的至少一预测距离。然后,处理器113可根据验证结果来调整深度学习模型114的决策逻辑。例如,所述距离数据可包括图3中在多个时间点t1~t3物体方位识别装置
11与目标物12之间的距离d1~d3。例如,所述预测距离可包括图3中距离d31及/或d32的预测值,且验证数据可包括距离d31及/或d32的正确值。处理器113可根据深度学习模型114所输出的距离的预测值与正确值之间的差异,来调整深度学习模型114的决策逻辑。借此,可提高深度学习模型114往后对物体方位识别装置11与目标物12之间的距离的预测准确度。
67.在一实施例中,所述训练数据集可包括距离数据、速度数据与验证数据。处理器113可根据所述验证数据验证深度学习模型114响应于所述训练数据集中的所述距离数据与所述速度数据所输出的至少一预测位置。然后,处理器113可根据验证结果来调整深度学习模型114的决策逻辑。例如,所述距离数据可包括在多个时间点物体方位识别装置11与目标物12之间的距离,且所述速度数据可包括在所述多个时间点物体方位识别装置11的移动速度、在所述多个时间点物体方位识别装置11的位置、在所述多个时间点物体方位识别装置11与目标物12之间的相对移动速度。此外,所述预测位置可包括在特定时间点目标物12的位置(例如图5的坐标(x2,y2))的预测值,且验证数据可包括在所述特定时间点目标物12的位置的正确值。处理器113可根据深度学习模型114所输出的位置的预测值与所述位置的正确值之间的差异,来调整深度学习模型114的决策逻辑。借此,可提高深度学习模型114往后对目标物12在特定时间点的位置(例如图5的位置202(t3))的预测准确度。
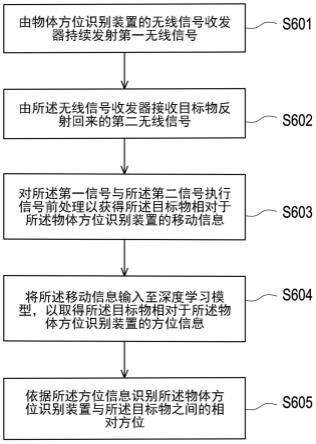
68.图6是根据本揭示的一实施例所示出的物体方位识别方法的流程图。请参照图6,在步骤s601中,由物体方位识别装置中的无线信号收发器持续发射第一无线信号。在步骤s602中,由所述无线信号收发器接收目标物反射回来的第二无线信号。在步骤s603中,对所述第一信号与所述第二信号执行信号前处理以获得所述目标物相对于所述物体方位识别装置的移动信息。在步骤s604中,将所述移动信息输入至深度学习模型,以取得所述目标物相对于所述物体方位识别装置的方位信息。在步骤s605中,依据所述方位信息识别所述物体方位识别装置与所述目标物之间的相对方位。
69.然而,图6中各步骤已详细说明如上,在此便不再赘述。值得注意的是,图6中各步骤可以实作为多个程序码或是电路,本揭示不加以限制。此外,图6的方法可以搭配以上范例实施例使用,也可以单独使用,本揭示不加以限制。
70.综上所述,本揭示所提出的实施例可通过无线信号收发气搭配深度学习模型,来识别处于不同的移动状态的物体方位识别装置与目标物之间的相对方位。借此,可有效提高物体方位识别装置在使用上的便利性以及对物体方位识别装置与目标物之间的相对方位的检测准确度。
71.虽然本揭示已以实施例公开如上,然其并非用以限定本揭示,任何所属技术领域中技术人员,在不脱离本揭示的构思和范围内,当可作些许的变动与润饰,故本揭示的保护范围当视权利要求所界定者为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1