一种无人机路径规划方法
1.本发明属于路径规划技术领域,具体涉及一种无人机路径规划方法。
背景技术:
2.近年来无人机的发展越来越火热,由于飞行员培养难度过大、费用过高且周期过长,所以为了能替代飞行员操纵,无人机成为未来发展的热门方向。特别是最近几年在战场上无人机发挥了重要的作用,无人机成为局部冲突中便宜又高效的空中作战武器。在民用和测绘领域其作用也越来越重要。但是早期的无人机都是按照地面人员的提前规划或者是实时遥控对飞机进行控制,这类似于现在的模拟驾驶飞机的游戏设备。在复杂环境或者是长时间的阶段飞行中使用人工进行操作,不仅浪费人力,而且人工很难做出及时和科学的操作。所以无人机的自主导航成为了无人机发展的重要研究方向,这其中路径规划是它最基本问题。当然无人机的路径规划是十分困难的,风速、高度、角度、复杂的气象条件,以及各种飞行控制和避障都是研究的难点。
技术实现要素:
3.本发明为了解决上述问题,提出了一种无人机路径规划方法。
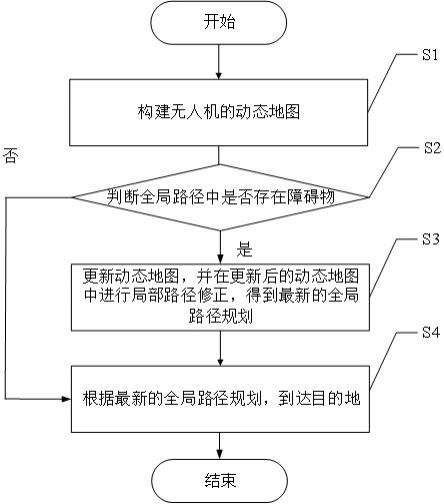
4.本发明的技术方案是:一种无人机路径规划方法包括以下步骤:s1:构建无人机的动态地图;s2:在动态地图中,进行全局路径规划,并判断全局路径中是否存在障碍物,若是则进入步骤s3,否则进入步骤s4;s3:更新动态地图,并在更新后的动态地图中进行局部路径修正,得到最新的全局路径规划;s4:根据最新的全局路径规划,到达目的地。
5.进一步地,步骤s1包括以下子步骤:s11:利用无人机的激光雷达获取当前时刻传感数据,并对当前时刻传感数据进行滤波,得到当前时刻数据帧;s12:提取当前时刻数据帧对应的数据特征,并根据当前时刻数据帧对应的数据特征与上一个时刻数据帧对应的数据特征,确定无人机的相对位移;s13:根据无人机的相对位移确定当前时刻无人机在世界坐标系中的位置,并根据当前时刻无人机在世界坐标系中的位置确定动态地图。
6.进一步地,步骤s2中,进行全局路径规划包括以下子步骤:s21:将无人机在动态地图中的初始位置作为初始节点,建立搜索树;s22:在搜索树中生成子节点,并遍历搜索树的所有子节点,确定搜索树的若干个最终节点;s23:将初始节点与若干个最终节点依次进行距离匹配,若匹配通过,则将初始节点和最终节点的连线作为全局路径,否则剔除最终节点,直至初始节点与若干个最终节点
完成距离匹配。
7.进一步地,步骤s22中,确定搜索树的若干个最终节点的具体方法为:利用随机遍历函数对所有子节点进行遍历,得到各个子节点对应的遍历值,将遍历值低于遍历阈值的子节点剔除,确定搜索树的若干个最终节点;其中,随机遍历函数erg的表达式为:其中,n为子节点个数,x1为初始节点在动态地图中的横坐标,y1为初始节点在动态地图中的纵坐标,xi为子节点在动态地图中的横坐标,yi为初始节点在动态地图中的纵坐标,li表示初始节点到子节点的距离。
8.进一步地,步骤s23中,对初始节点和最终节点进行匹配的具体方法为:计算初始节点和最终节点的匹配距离,若匹配距离低于设定距离阈值,则匹配通过,否则匹配不通过。
9.进一步地,步骤s3中,进行局部路径修正包括以下子步骤:s31:获取障碍物和无人机的位置信息,并根据障碍物的位置信息确定全局路径中待调整路径;s32:构建路径修正模型,并将障碍物和无人机的位置信息输入至路径修正模型,得到局部调整路径;s33:将局部调整路径替换待调整路径,得到最新的全局路径规划。
10.进一步地,步骤s32包括以下子步骤:s321:根据无人机的位置信息,确定无人机的时间约束范围;s322:将障碍物和无人机的位置信息输入至路径修正模型中,得到修正控制角;s323:根据修正控制角调整无人机的运动方向,迭代计算无人机与目的地的直线距离,直至直线距离小于设定阈值且无人机到达目的地时间在时间约束范围内。
11.进一步地,路径修正模型包括输入层、隐藏层和输出层;输入层用于获取障碍物和无人机的位置信息;隐藏层用于构建修正规则,并获取修正控制角;输出层用于输出修正控制角。
12.本发明的有益效果是:本发明提出一种无人机路径规划方法,在构建动态地图的基础上,依次进行全局路径和局部路径修正,既保证了路径的多样性,又能避开故障路段,同时保证无人机执行任务的高效性和安全性,避免资源浪费。
附图说明
13.图1为无人机路径规划方法的流程图。
具体实施方式
14.下面结合附图对本发明的实施例作进一步的说明。
15.如图1所示,本发明提供了一种无人机路径规划方法,包括以下步骤:
s1:构建无人机的动态地图;s2:在动态地图中,进行全局路径规划,并判断全局路径中是否存在障碍物,若是则进入步骤s3,否则进入步骤s4;s3:更新动态地图,并在更新后的动态地图中进行局部路径修正,得到最新的全局路径规划;s4:根据最新的全局路径规划,到达目的地。
16.在本发明实施例中,步骤s1包括以下子步骤:s11:利用无人机的激光雷达获取当前时刻传感数据,并对当前时刻传感数据进行滤波,得到当前时刻数据帧;s12:提取当前时刻数据帧对应的数据特征,并根据当前时刻数据帧对应的数据特征与上一个时刻数据帧对应的数据特征,确定无人机的相对位移;s13:根据无人机的相对位移确定当前时刻无人机在世界坐标系中的位置,并根据当前时刻无人机在世界坐标系中的位置确定动态地图。
17.在本发明实施例中,步骤s2中,进行全局路径规划包括以下子步骤:s21:将无人机在动态地图中的初始位置作为初始节点,建立搜索树;s22:在搜索树中生成子节点,并遍历搜索树的所有子节点,确定搜索树的若干个最终节点;s23:将初始节点与若干个最终节点依次进行距离匹配,若匹配通过,则将初始节点和最终节点的连线作为全局路径,否则剔除最终节点,直至初始节点与若干个最终节点完成距离匹配。
18.在本发明实施例中,步骤s22中,确定搜索树的若干个最终节点的具体方法为:利用随机遍历函数对所有子节点进行遍历,得到各个子节点对应的遍历值,将遍历值低于遍历阈值的子节点剔除,确定搜索树的若干个最终节点;其中,随机遍历函数erg的表达式为:其中,n为子节点个数,x1为初始节点在动态地图中的横坐标,y1为初始节点在动态地图中的纵坐标,xi为子节点在动态地图中的横坐标,yi为初始节点在动态地图中的纵坐标,li表示初始节点到子节点的距离。
19.在本发明实施例中,步骤s23中,对初始节点和最终节点进行匹配的具体方法为:计算初始节点和最终节点的匹配距离,若匹配距离低于设定距离阈值,则匹配通过,否则匹配不通过。
20.在本发明实施例中,步骤s3中,进行局部路径修正包括以下子步骤:s31:获取障碍物和无人机的位置信息,并根据障碍物的位置信息确定全局路径中待调整路径;s32:构建路径修正模型,并将障碍物和无人机的位置信息输入至路径修正模型,得到局部调整路径;
s33:将局部调整路径替换待调整路径,得到最新的全局路径规划。
21.在本发明实施例中,步骤s32包括以下子步骤:s321:根据无人机的位置信息,确定无人机的时间约束范围;s322:将障碍物和无人机的位置信息输入至路径修正模型中,得到修正控制角;s323:根据修正控制角调整无人机的运动方向,迭代计算无人机与目的地的直线距离,直至直线距离小于设定阈值且无人机到达目的地时间在时间约束范围内。
22.在本发明实施例中,路径修正模型包括输入层、隐藏层和输出层;输入层用于获取障碍物和无人机的位置信息;隐藏层用于构建修正规则,并获取修正控制角;输出层用于输出修正控制角。
23.在本发明实施例中,修正规则为:若障碍物和无人机的距离较远,且目的地在无人机左侧,则无人机向左侧转小弯,并向左侧运动;若障碍物和无人机的距离较近,且目的地在无人机右侧,则无人机向右侧转弯。
24.修正控制角θ的计算公式为:其中,θ0为无人机当前时刻t的角度,uk为第k个障碍物的初始角速度,nk为第k个障碍物在当前时刻t的角速度,为第k个障碍物在路径修正模型的权重。
25.本领域的普通技术人员将会意识到,这里所述的实施例是为了帮助读者理解本发明的原理,应被理解为本发明的保护范围并不局限于这样的特别陈述和实施例。本领域的普通技术人员可以根据本发明公开的这些技术启示做出各种不脱离本发明实质的其它各种具体变形和组合,这些变形和组合仍然在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1