一种铁路轨道平顺性调整方法与流程
1.本发明涉及对铁路系统中钢轨的测量、调整技术领域,具体涉及一种铁路轨道的平顺性调整方法。
背景技术:
2.在水平面内,把轨道向左或者是向右进行拨动,被称为拨道作业。拨道作业的目的是为消除线路方向(轨向)偏差,使曲线圆顺、直线直,而使轨道获得好的平顺性。捣固车进行拨道作业时,拨道量的大小及方向一般是由安装在捣固车上的线路方向偏差检测装置测出的。
3.轨道不平顺是引起机车振动、轮轨动作用力增大的主要根源。对行车平稳舒适和行车安全都有重要影响,是直接限制行车速度的主要因素。鉴于铁路轨道的平顺性在影响铁路列车运行的安全性和舒适性的诸多因素中起到主要作用,因此需要对铁轨的平顺性进行调整。
4.轨道方向不平顺(常简称为,轨向不平顺或者方向不平顺),是指轨头内侧面沿长度方向上的横向凹凸不平顺,由铺轨施工、整道作业的轨道中心线定位的偏差,造成的主要原因有,轨排横向残余变形积累和轨头侧面磨耗不均匀、扣件失效、轨道横向弹性不一致等。左、右轨方向的偏差变化往往不同,尤其在扣件薄弱的区段差异会更大,因此需要区分左轨方向和右轨方向。并将左、右轨方向的平均值作为轨道的中心线方向偏差。铁路普速线路普遍采用gnss+惯导的惯性测量方式,来对线路的平顺性进行测量。常用的轨检仪作为测量钢轨轨道数据的仪器,其测量精度在毫米级,用在对钢轨的轨向偏差数据和高低偏差数据测量上时能够保证测量的精确性。故而,对钢轨进行调整前,一般多用轨检仪对钢轨的轨向偏差数据和高低偏差数据进行测量,以便用在具体的平顺性调整方法中。
5.以往采用的轨道/钢轨平顺性调整方法,其基本原则多是把偏差量归零。这种归零调整的方法会造成在对钢轨作长距离调整后,调整量的矢量和不为零的情况,容易导致钢轨向一个方向调整量过大,使之与其连接的未被作调整的钢轨之间产生内应力。在内应力释放过程中容易造成新的不平顺性等问题。
技术实现要素:
6.针对以往对铁路轨道进行平顺性调整时采用的方法易导致调整量的矢量和不为零,轨道上存在调整内应力的问题,本发明提供了一种铁路轨道平顺性调整方法,依照该方法对轨道作平顺性调整后,易保证调整量矢量和归零,而能避免调整后的轨道上存在内应力。
7.本发明解决其技术问题所采取的技术方案是:一种铁路轨道平顺性调整方法,以轨道的长度方向作x轴,以轨道的宽度方向作y轴来建立坐标系,包括如下步骤:(1)测量轨向偏差数据:在钢轨上,沿x轴方向间断地选取n个测量点,并测出每个测量点的轨向偏差数据,
各两两相邻两个测量点之间的钢轨长度相加之和为被测量钢轨的总长度,计为s米;(2)对测量所得轨向偏差数据进行处理:1)将测量得到的沿y轴正向产生的偏差设定为正偏差,总计得到的正偏差个数为n1,同时,将测量得到的沿y轴负向产生的偏差设定为负偏差,总计得到的负偏差个数为n2,则n1+n2=n;2)以n1个正偏差值相加之和除以n1而得正偏差的平均值p1,以n2个负偏差值相加之和除以n2而得负偏差的平均值p2;3)计算出轨向偏差的峰值正负总值的平均值t32,t32=(|p1|+|p2|)/2;4)计算出轨向偏差的y值总平均偏移量t28,t28=p1+p2;(3)计算出轨向偏差调整的理想线型y:y=y1-δ*[t28+t32*cos(x/t31)];其中,y1为定值,能决定在y坐标上上下偏移的中心线(高低)位置;δ为定值,用来放大计算数据,以便计算结果能够与实际应用相符,其在经过有限次测试,来选取出的一个理想值;x为铁轨的公里坐标值,各测量点公里坐标x=x0+相应测量点距起始点的距离,其中x0为起点公里坐标;t31取值为2*m,m=1、2、3、4、5、6
…
m;(4)计算调整量:1)用在n个测量点得到的测量数据, 作各测量点的x-y轴坐标点,绘制钢轨处于原始不平顺状态时的曲线;2)理想线型中各测量点对应的y值与原始不平顺状态曲线中的y值相减而得在各测量点的调整量。根据各测量点处计算得到的调整量来对钢轨/轨道的平顺性进行调整。
[0008]
进一步,在步骤(1)中,于钢轨上每隔δs米测量一个轨向偏差数据,测得n个顺次沿x轴向的测量点数据后,则所测量钢轨的总长度s=δs*(n-1)。此时,在步骤(3)中,各测量点公里坐标x=x0+n*δs,其中n=0、1、2、3、4、5、6
…
n。
[0009]
所述δs的取值区间为1米至60米,比如10米,或15米,或50米。优选为3米至30米,具体实施时或者选为5米,或者选为8米,或者选为12米,或者选为20米。
[0010]
进一步,在步骤(1)中,使用轨检仪来测量各个测量点的轨向偏差数据。
[0011]
进一步,在步骤(3)中,y=y1-δ*[t28+t32*t30*cos(x/t31)],其中t30取值为
±
1。
[0012]
进一步,所述y1取值区间为100至5000,所述δ取值区间为1000至60000。
[0013]
所述y1的优选取值区间为1200至2400,所述δ的优选取值区间为15000至25000。此时,优选地,t31的匹配取值或为2,或为4,或为8。
[0014]
有益效果:依照本专利所提供的铁路轨道平顺性调整方法,来对轨道作平顺性调整时,易保证调整量矢量和归为零,而能有效避免调整后的钢轨上存在内应力。解决了以往对铁路轨道进行平顺性调整后,调整量的矢量和不为零,而使轨道上存在调整内应力的问题,使得钢轨被调整后能够保持有可靠的平顺性。
附图说明
[0015]
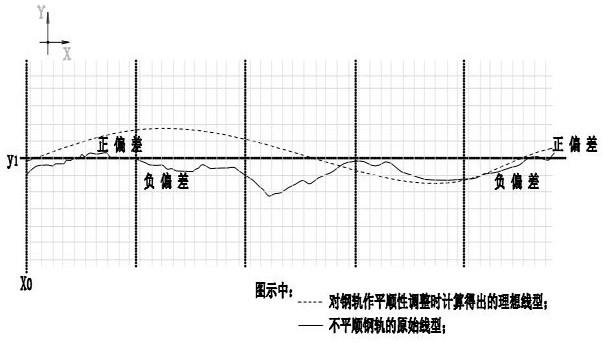
图1为铁路轨道上表示轨向偏差数据正、负偏差产生量方向的示意图。
[0016]
图2为不平顺的钢轨其原始轨向偏差数据在坐标系上能绘成的曲线线型,和计算所得的对钢轨作平顺性调整时参照的理想线型(局部图)。
[0017]
图中:1 钢轨/轨道;
‑‑‑‑‑ꢀ
表示:对钢轨作平顺性调整时计算得出的理想线型;_____ 表示:不平顺钢轨的原始线型。
具体实施方式
[0018]
说明书附图所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容所能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“前”、“后”、“中间”等用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
[0019]
由于铁路钢轨/轨道的长度很大,现实中对钢轨的绝对调直是不可能的,只能进行相对的平顺性调整。在对钢轨进行平顺性调整时,可以考虑按照正弦或余弦函数变化的方式进行平顺性调整,以正弦或余弦函数的波长为单元量,来设置单个的调整区间,逐段地对钢轨进行平顺性调整。
[0020]
具体实施例中,正弦或余弦的周期(波长)可设定120米左右,或者240米左右,或者480米左右,为一段调整区间,也可以设定其他值作为周期。
[0021]
如图1所示,以沿轨道长度的方向作x轴,以沿轨道宽度的方向作y轴来建立坐标系。所谓轨向偏差数据即沿y轴的偏差数据(为本领域的惯常说法)。某具体实施方式中,依本专利所涉及的该种对铁路轨道平顺性作调整的方法,可按照如下方法操作。主要包括以下步骤。
[0022]
(1)测量轨向偏差数据:在钢轨上,沿x轴向顺此地每隔δs米测量一个轨向偏差数据,测得n个测量点数据时,测量的钢轨总长度计为s米,则n=s/δs+1。
[0023]
具体实施时,或者将δs取值为5米,或者将δs取值为8米,或者将δs取值为10米等等。δs的取值大小需要与s的长度相适应,如果s的取值较大一些,则δs的取值可以相对大一点。以δs取值为5米为例,取值位置的个数n为600个,则s为2995米。
[0024]
在本专利的技术方案中,对所述δs的取值并不排除小于5米的情况,以及不排除δs的取值大于10米的情况。
[0025]
(2)对所测得的轨向偏差数据进行处理:1)将沿y轴正向产生的偏差(或称偏差数据)设定为正偏差(或称正偏差数据),总计得到的正偏差个数为n1,同时,将沿y轴负向产生的偏差设定为负偏差,总计得到的负偏差个数为n2,则n1+n2=n。见如图1,左侧标记处为测得的正偏差,右侧标记处为测得的负偏差。所以,正偏差为正数,负偏差为负数。见如图2所示,处于y1上方的轨向偏差数据为正偏差区域,反之,处于y1下方的轨向偏差数据为负偏差区域。
[0026]
惯例规定:轨向正负偏差规定为,顺轨检车正向,轨向向左为正,向右为负。
[0027]
因为使用现有的轨检仪能够测出各测量点处发生轨向偏差的方向,所以能够很方便地判断侧得的每个位置处产生轨向偏差的读值是正数值还是负数值,故而本专利所涉及的调整方法其在应用时可以不借助专有的新设备,实施起来方便且经济。
[0028]
需要强调的是,本专利的技术方案并不排除使用其他测量仪器来测量轨道上的轨向偏差数据的手段。
[0029]
2)以n1个正偏差值相加之和除以n1而得正偏差的平均值p1(为正数),以n2个负偏差值相加之和除以n2而得负偏差的平均值p2(为负数)。
[0030]
3)计算出轨向偏差的峰值正负总值的平均值t32,t32=(|p1|+|p2|)/2,或表示为t32=(p1+|p2|)/2。
[0031]
4)计算出轨向偏差的y值总平均偏移量t28,t28=p1+p2。
[0032]
(3)计算出轨向偏差调整的理想线型y:y=y1-δ*[t28+t32*t30*sin(x/t31)];其中,y1为定值,能决定在y坐标上上下偏移的中心线位置;δ为定值,用来放大计算数据,以便计算结果能够与实际应用相符。δ的具体数值,能通过有限次测试的方式,来选取出比较理想的一个值;t30取值为
±
1,能够决定y函数是正弦函数变化,还是余弦函数变化的图形;x为铁轨/钢轨的公里坐标值,各测量点公里坐标x=x0+n*δs,其中x0为起点公里坐标,n=0、1、2、3、4、5、6
…
n;t31取值为2或4或8等2的倍数值,δs的值相对越大t31可相对选取大数值。
[0033]
在将y作如下函数设置时,t31取值为2则对应的正弦或余弦函数波长大约为120米,t31取值为4则对应的正弦或余弦函数波长大约为240米,t31取值为8则对应的正弦或余弦函数波长大约为480米。
[0034]
实践中,y函数可以具体表示为:y=1440-20000*[t28+t32*t30*sin(x/t31)],依该函数计算形成的坐标图见图2所示。
[0035]
(4)计算调整量:1)用在n个测量点得到的测量数据, 作各测量点的x-y轴坐标点,绘制钢轨处于原始不平顺状态时的曲线。
[0036]
2)理想线型中各测量点对应的y值与原始不平顺状态曲线中的y值相减而得在各测量点的调整量。
[0037]
在对钢轨/轨道的平顺性进行调整时,便能根据各测量点处计算得到的调整量来做实际调整。
[0038]
依照本专利的的方法度轨道平顺性进行调整,既可以达到轨道平顺性调整的要求,又能保证至少在120米至300调整范围内的调整矢量(轨向偏移量正值与轨向偏移量负值)和为零,而能避免因调整钢轨的平顺性而在轨道上形成内应力,来影响轨道平顺性调整后的可靠性。前述是依照函数y=1440-20000*[t28+t32*t30*sin(x/t31)]计算得到的调整范围区间,当函数的定值取值变化时,调整范围区间大小会发生相应的变化。得到的理想线型也会有所变化。
[0039]
上述实施方式仅例示性说明本发明的原理及其功效,而非用于限制本发明。本发明还有许多方面可以在不违背总体思想的前提下进行改进,对于熟悉此技术的人士皆可在
不违背本发明的精神及范畴下,可对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1