一种脉冲激光测距系统的超分辨误差补偿方法
1.本发明属于激光测量技术领域,具体涉及一种脉冲激光测距系统的超分辨误差补偿方法。
背景技术:
2.随着超快激光技术的发展,在测距中使用光脉冲序列显著提升了测量的动态范围以及距离分辨率。然而,激光器本身的不稳定性、测量装置固有抖动带来的信号漂移和信号信噪比降低均使距离测量的精确程度受到影响,严重制约了高精度距离测量系统的性能。目前的解决方式是在硬件层面对系统进行稳定,包括使用带反馈控制的电动平移台,高自由度的伺服系统等。通过硬件的改进对系统抖动进行补偿价格高昂,且对于装置自身引入的极细微抖动量难以消除。
3.目前在软件层面对带有距离信息的测量信号进行抖动补偿,其补偿方法的效率与精度距离作为硬件补偿方法的替代方案仍有一定的差距。传统的补偿方法无法突破信号本身的时间分辨率,同时对于系统自身伴随的极细微抖动不敏感,使得误差补偿的精度无法进一步地提升,导致了距离测量中测量误差无法有效控制的问题。
技术实现要素:
4.为了解决上述问题,本发明旨在提供一种脉冲激光测距系统的超分辨误差补偿方法,
5.为了实现上述目的,本发明采用以下技术方案:
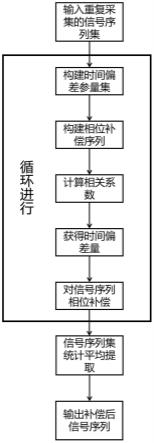
6.一种脉冲激光测距系统的超分辨误差补偿方法,超分辨误差补偿方法由构建时间偏差参量集、构建相位补偿序列、计算相关系数、获得时间偏差量、对信号序列相位补偿五个步骤组成。
7.脉冲激光测距系统由脉冲式激光光源、激光发射与接收装置、光电转换器、信号采集及预处理器、信号分析与输出单元五部分构成。
8.信号采集及预处理器将产生包含测距信息的周期离散信号序列,并且通过多次重复测量,获得信号序列集y1、y2…yn
,其中的每一个序列均对应于一组等间隔(δt)的时间序列t={t1,t2,
…
,tn}
t
。
9.以y1为参考信号序列,依次对集合中的序列y2…yn
进行整体时间位置的误差补偿,补偿方法的五个步骤如下:
10.步骤1:构建时间偏差参量集γ={τ1,τ2,
…
,τm},其中参量数值间的最小差值可小于δt;
11.步骤2:选中一个时间偏差参量τi,构建信号在频域内的相位补偿序列φi= exp{jwτi/δt}(即为等间隔的频率序列),对于待补偿的信号yk(k》1),进行操作:y
k,i
=ifft{fft{yk}
·
φi},其中fft和ifft 表示离散傅里叶变换和反变换;
12.步骤3:计算y
k,i
与y1的相关系数:c
k,i
=∑{y
k,i
·
y1};
13.步骤4:对于时间偏差参量集中的所有参量,进行步骤2和步骤3的操作获得对应的相关系数,并从所有的相关系数中,选出系数最大值所对应的时间偏差量τ
x
∈γ,即信号yk关于y1的整体时间偏差估计值,y
k,x
即补偿后的信号序列;
14.步骤5:对于重复采集的信号序列集,依次进行时间偏差补偿,得到补偿后的信号序列集{y1,y
2,x
…
,y
n,x
},其平均后的信号序列为以及时间偏差估计值的集合{τ1,τ
2,x
…
,τ
n,x
},其平均值为最终,从该组信号序列集合中,提取具有统计平均意义的误差补偿后的信号序列,即:
15.所述脉冲式激光光源发射具有固定时间周期的激光脉冲,重复频率为64 mhz,重频相位噪声在1khz偏频处约-140dbc/hz,脉冲宽度约1ps,功率13mw;
16.所述激光发射与接收装置为一组迈克尔逊干涉仪,发射光路包括探测光路与本地参考光路;其中探测光路将脉冲式激光对准目标物发射,光在目标物表面反射后,被接收装置所接收;本地参考光源由脉冲式激光光源分光产生,并经过周期变化的激光延时线改变了激光脉冲的时间周期,激光延时线的最大延时量为50 ps,延时量变化呈正弦曲线,周期为0.5s;接收到的探测光信号与参考光源发生干涉,干涉后的光信号强度将随着激光延时量的改变而发生变化,获得随时间变化的激光干涉信号,该激光干涉信号具备时间周期性;
17.所述激光发射与接收装置中的本地参考光源也可以另一个时间周期不同的脉冲式激光光源;
18.所述光电转换器将激光干涉信号转换为时间变化的周期电信号。
19.所述的信号采集及预处理器将周期电信号数字离散化,并对周期电信号进行数字滤波、数字放大操作,形成一组周期的离散信号序列:yi={y
i1
,y
i2
,
…
,y
in
}
t
。为了防止原信号携带的直流量影响距离的分辨,对得到的时间离散信号序列yi取平均值再在信号序列yi每个对应点位上减去其平均值得到不含直流量的时间离散信号序列yi(即:yi的均值为0);
20.所述信号采集及预处理器包括一个12位模数转换器,采样速率最高可达1.8 gsa/s,在一个周期内,采集时间长度为8ms的离散序列。
21.所述的时间偏差参量集中的参数数值呈平均分布,分布范围设置为干涉信号条纹间隔对应的时间跨度,约为20μs,参量间的固定差值由参量集的容量大小所决定,该固定差值也决定了补偿方法的分辨率。
22.所述步骤4中涉及时间偏差参量的选择顺序,可按照参量的数值大小进行排序依次选取,亦可参考前续信号序列的时间偏差估计量,优先选择数值接近的时间偏差参量;在步骤4之后,步骤5之前,可以多次修正时间偏差参量集γ,包括调整参量集的数值分布范围、减小参量间的数值差异,并重复步骤1到步骤4 的操作,以此提高对信号序列的时间偏差量的估计精度;同时,通过增加一次测量条件下的信号序列个数(n),可以提升信号序列的信噪比,以及时间准确度,由此提高测距系统的准确度和灵敏度。
附图说明
23.为了更清楚地说明本发明具体实施例中的技术方案,下面将对实施例描述中所需
要使用的附图作简单地介绍,显而易见地,下面描述的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
24.图1为本发明实施例中的一种脉冲激光测距系统的超分辨误差补偿系统的示意图;
25.图2为本发明实例中的一种脉冲激光测距系统的超分辨误差补偿方法的流程示意图;
26.图3为本发明实例中的一种脉冲式激光光源构造原理图的示意图;
27.图4为本发明实例中的一组作为激光发射与接收装置的迈克尔逊干涉仪的结构示意图;
28.图5为本发明实例中采集的在一个周期内的离散序列示意图;
29.图6a为本发明实例中通过多次重复采集获得的一个测量条件下的多组信号序列堆叠图;
30.图6b为本发明实例中经补偿后的多组信号序列堆叠图;
31.图7为本发明实例中的整体时间偏差估计值的散点图;
32.图8为本发明实例中的补偿结果示意图;
33.图9为本发明实例中的信噪比提升结果示意图;
34.图中,1-脉冲激光测距系统由脉冲式激光光源;2-激光发射与接收装置;3
‑ꢀ
光电转换器;4-信号采集及预处理器;5-信号分析与输出单元。
具体实施方式
35.下面结合附图和具体实施例对本发明作进一步的说明,但不应就此理解为本发明所述主题的范围仅限于以下的实施例,在不脱离本发明上述技术思想情况下,凡根据本领域普通技术知识和惯用手段做出的各种修改、替换和变更,均包括在本发明的范围内。
36.参照图1,实例中,脉冲激光测距系统yi由脉冲激光测距系统生成,脉冲激光测距系统由脉冲式激光光源1、激光发射与接收装置2、光电转换器3、信号采集及预处理器4、信号分析与输出单元5五部分构成,参考信号序列y1y1、y2…yn
由脉冲激光测距系统生成。
37.参照图2,实例中,为了补偿由于测距系统自身的误差导致的信号发生的极细微时间抖动,以y1为参考信号序列,根据发明内容提及的一种超分辨误差补偿方法步骤1到步骤5,在数据处理平台编写计算程序代码,依次对集合中的序列 y2…yn
进行整体时间位置的误差补偿。
38.首先输入参考信号序列y1并赋值于y
ref
,构建循环体以遍历集合中待补偿的序列y2…yn
,依次输入y2…yn
并赋值于y
in
。以2π为范围构建等间隔的频率序列 w,包含点数与信号序列的点数相一致,即
39.构建时间偏差参量集γ={τ1,τ2,
…
,τm},时间偏差参量的数值呈平均分布,分布范围设置为干涉信号条纹间隔对应的时间跨度,约为20μs,参量间的固定差值由参量集的容量大小所决定,该固定差值也决定了补偿方法的分辨率,原理上可以小于信号时间间隔δt。
40.创建数据空间c以存放相关系数的计算结果。
41.构建循环体以遍历时间偏差参量集γ中的每一个参量。依次选中时间偏差参量τi,构建信号在频域内的相位补偿序列φi=exp{jwτi/δt},对于待补偿的信号 y
in
,进行操作:y
in
=ifft{fft{y
in
}
·
φi},并计算y
in
与y
ref
的相关系数:ci=∑{y
in
·yref
}。
42.在遍历完时间偏差参量集中的参量后可以得到一组相关系数序列,即y
in
与 y
ref
对应于每一个时间偏差参量τi的相关系数。利用max函数选出相关系数最大值所对应的时间偏差量τ
x
,即信号y
in
关于y
ref
的整体时间偏差估计值。最后对信号y
in
补偿相应的时间偏差量τ
x
得到y
out
=ifft{fft{y
in
}
·
exp{jwτ
x
/δt}}即补偿后的信号序列,如图6b所示。
43.遍历所有待补偿的序列y2…yn
后,得到补偿后的信号序列集{y1,y
2,x
…
,y
n,x
},计算其平均后的信号序列为以及y2…yn
对于y1的整体时间偏差估计值集合 {τ1,τ
2,x
…
,τ
n,x
},如图7所示,计算其平均值为最终,从该组信号序列集合中,提取具有统计平均意义的误差补偿后的信号序列,即:差补偿后的信号序列,即:
44.参照图3,实例中,基于脉冲激光的测距系统采用了全保偏锁模光纤激光器作为脉冲式激光光源1,重复频率64mhz,重频相位噪声在1khz偏频处约-140 dbc/hz。脉冲宽度约1ps,功率13mw;
45.参照图4,实例中,采用一组迈克尔逊干涉仪作为激光发射与接收装置2。接收装置中的参考光源由脉冲式激光光源1分光产生,并经过周期变化的激光延时线改变了激光脉冲的时间周期。激光延时线的最大延时量为50ps,延时量变化呈正弦曲线,周期为0.5s。接收到的探测光信号与参考光源进行干涉,干涉后的光信号强度将随着激光延时量的改变而发生变化,即形成了一组周期时间变化的光学强度信号。
46.光电转换器3(》300mhz)将该信号转化为时间变化的周期电信号。
47.参照图5,实例中,信号采集及预处理器4包括一个12位模数转换器,采样速率最高可达1.8gsa/s,在一个周期内,采集时间长度为8ms的离散序列;
48.离散序列包含了较为完整的激光干涉信号。经过数字滤波和放大,最终得到一个周期的时间离散信号序列yi={y
i1
,y
i2
,
…
,y
in
}
t
。
49.为了防止原信号携带的直流量影响距离的分辨,对得到的时间离散信号序列 yi取平均值再在信号序列yi每个对应点位上减去其平均值得到不含直流量的时间离散信号序列yi。构建与时间离散信号序列对应的一组等间隔(δt)的时间序列t={t1,t2,
…
,tn}
t
。时间窗口与扫描延迟线的扫描周期相对应为0.5s。通过多次重复采集,可以获得一个测量条件下的多组信号序列,即构成集合 y1,y2…
,yn},如图6a所示。从图中可以明显看出采集到的信号由于测距系统自身的误差,导致信号整体强度与时间位置发生的随机变化。其中时间变化的范围(σ
t
)可小于信号对应的时间序列间隔(σ
t
《δt),即低于信号时间分辨率的误差量(超分辨误差)。
50.图8中展示了最终补偿完成的信号序列与初始序列集的情况对比,其中的粗线为具有统计平均意义的误差补偿后的信号序列。可以看出,补偿后的信号序列相比于未补偿的信号时间晃动更小,实为由系统自身误差引入的时间偏移量被补偿后的结果,而粗线可视为在该测量时间内最能体现距离信息的干涉信号。
51.通过计算信号峰峰值v
pp
与噪声均方差σ
noise
,计算得到信噪比snr=10
· log
10
(v
pp
/2
·
σ
noise
),如图9所示。信号的信噪比随着一次测量条件下的信号序列个数(n)的增加而提升。信噪比的提升可以提高时间准确度,由此提高测距系统的准确度和灵敏度。
52.以上对本发明所提供的一种脉冲激光测距系统的超分辨误差补偿方法进行了详细介绍,本文中应用了具体个例对本发明的结构及工作原理进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1