基于自适应无迹卡尔曼滤波的锂电池荷电状态估计方法
1.本发明属于电池管理技术领域,涉及锂电池管理技术,具体地说,涉及一种基于自适应无迹卡尔曼滤波的锂电池荷电状态估计方法。
背景技术:
2.近年来,随着能源危机和环境问题的日益加重,低污染、高能效的电动汽车成为汽车工业研究的热点。锂离子电池具有小型轻量、高能量密度、大输出功率和高安全新能的特点,成为电动汽车储能器件的首选。电池荷电状态(英文:state of charge,简称:soc)直接反映电池剩余容量,是车辆控制系统制定最优能源管理策略的重要依据。soc是一个重要的电池性能参数,准确估计soc对于提高电池安全性能、延长电池寿命、保证电池系统可靠运行具有重要意义。
3.目前,常用的锂电池soc估计方法有安时积分法、开路电压法、神经网络法和卡尔曼滤波算法(英文:kalman filtering,简称kf)等。其中,安时积分法通过累积充放电的电量来估计电池的soc,同时根据放电速率对估计出的soc进行一定的补偿。安时积分法相对简单,可动态估计电池soc,但是电流积分需要获得初始的soc值,并且要对电池电流进行精确采集,这导致soc估计误差随时间不断积累,估计精度低,因此,在实际应用中,通常将安时积分法结合其他方法一起使用来提高估计精度。开路电压法是根据电池的开路电压与电池内部锂离子浓度之间的变化关系,间接地拟合出它与电池soc之间的对应关系,然后将电池长时间静置测量开路电压,根据拟合的开路电压与soc对应关系获得当前电池soc。开路电压法需要电池长时间静置,以获取稳定点的端电压,不能实时在线估计电池的soc。神经网络法是模拟人脑及其神经元用以处理非线性系统的新型算法,无需深入研究电池的内部结构,只需要提前从目标电池中提取大量符合其工作特性的输入与输出样本,并将其输入到使用该方法所建立的系统中,就能获得电池的soc。神经网络法工作量较大,需要提取大量且全面的目标样本数据对系统进行训练,所输入的训练数据和训练方法在很大程度上都会影响soc估计的精度。卡尔曼滤波算法是一种新型最优化自回归数据滤波算法,该算法的本质是根据最小均方差原则,对复杂动态系统做出最优估计。卡尔曼滤波算法克服了电流积分对初始值依赖的严重缺点,并且不需要大量样本数据,可在线估计电池soc,在运行工况复杂的电动汽车动力电池的soc估算中,卡尔曼滤波算法具有显著的应用价值,成为近几年电池soc估计算法研究的热点。
4.卡尔曼滤波算法是一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。针对卡尔曼滤波不能解决非线性系统的问题,文献《p
é
rez,g.;garmendia,m.;reynaud,j.f.;crego,j.;viscarret,u.enhanced closed loop state of charge estimator for lithium-ion batteries based on extended kalman filter.appl.energy 2015,155,834
–
845,doi:10.1016/j.apenergy.2015.06.063》用扩展卡尔曼滤波算法(英文:extended kalman filtering,简称:ekf),将非线性系统用泰勒级数展开为线性系统,此方法忽略了高阶项,引入线性误差,可能导致滤波器发散。文献《he,
h.;xiong,r.;peng,j.real-time estimation of battery state-of-charge with unscented kalman filter and rtosμcos-ii platform.appl.energy 2016,162,1410
–
1418,doi:10.1016/j.apenergy.2015.01.120》用无迹卡尔曼滤波算法(英文:unscented kalman filter,简称:ukf),对非线性系统进行无损变换,没有忽略高阶项,提高了估计的精度。但没有考虑电池模型和系统噪声的不确定性。模型噪声和系统噪声的不确定性会导致误差增大、收敛速度慢和滤波发散。文献《sun,f.;hu,x.;zou,y.;li,s.adaptive unscented kalman filtering for state of charge estimation of a lithium-ion battery for electric vehicles.energy 2011,36,3531
–
3540,doi:10.1016/j.energy.2011.03.059》在无迹卡尔曼滤波的基础上引入自适应滤波,用自适应滤波估计的系统噪声协方差和观测噪声协方差分别替代无迹卡尔曼滤波的系统噪声协方差和观测噪声协方差,实现了系统误差和观测误差的实时更新,滤波效果相对较好,但自适应滤波不能真实的反应系统噪声和观测噪声误差。
5.此外,在传统的无迹卡尔曼滤波算法中,系统噪声协方差和观测噪声协方差通常被设定为常数,无法真实反应噪声的动态特性,对soc估计精度具有一定影响,从而降低了估计精度。
技术实现要素:
6.本发明针对现有技术存在的估计精度低等上述问题,提供了一种基于自适应无迹卡尔曼滤波的锂电池荷电状态估计方法,该方法通过实时监测滤波器中新息和残差的动态变化,实时修正系统噪声协方差和观测噪声协方差,调整滤波增益,估计精度高。
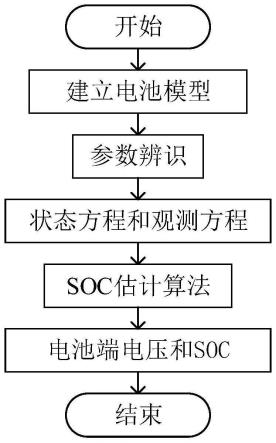
7.为了达到上述目的,本发明提供了一种基于自适应无迹卡尔曼滤波的锂电池荷电状态估计方法,其步骤为:
8.s1、基于锂电池的二阶等效电路模型获取模型的状态方程和输出方程,并进行离散化得到离散化的二阶等效电路模型的状态空间方程;
9.s2、通过电池放电的电压响应曲线、二阶等效电路模型的状态方程和输出方程辨识模型参数;
10.s3、将辨识的模型参数代入二阶等效电路模型的状态方程和输出方程,利用脉冲放电作为二阶等效电路模型输入,将二阶等效电路模型输出端电压与实际端电压进行对比,验证二阶等效电路模型精度;
11.s4、建立自适应无迹卡尔曼滤波算法,通过移动窗口法计算新息和残差的方差,自适应更新计算状态空间方程的系统噪声协方差和观测噪声协方差;
12.s5、基于建立的自适应无迹卡尔曼滤波算法,利用卡尔曼滤波器估计锂电池的端电压值和锂电池的soc值。
13.有限的,二阶等效电路模型的状态方程为:
[0014][0015]
式中,i
bat
为锂电池开路电流,放电为正;q
bat
为锂电池的额定容量;r
si
为锂电池的欧姆内阻;r
tf
为锂电池的极化电阻;c
tf
为锂电池的极化电容;r
ts
为浓差极化电阻;c
ts
为浓差极化电容;u
tf
为极化电容c
tf
两端的电压;u
ts
为浓差极化电容c
ts
两端的电压;
[0016]
二阶等效电路模型的输出方程为:
[0017]ubat
=u
oc
(soc)-r
siibat-u
tf-u
ts
ꢀꢀꢀ
(2)
[0018]
式中,u
bat
为电池端电压;u
oc
(soc)为与soc相关的电池开路电压。
[0019]
优选的,根据锂电池的二阶等效电路模型,结合公式(1)和公式(2)得到离散化的二阶等效电路模型的状态空间方程为:
[0020][0021]
式中,τ
tf
=r
tfctf
为快时间常数,τ
ts
=r
tscts
为慢时间常数;
[0022]
令i
bat
(k)=uk,u
bat
(k)=yk,c=[-1
ꢀ‑
1 0],离散化的二阶等效电路模型的状态空间方程简化为:
[0023]
优选的,步骤s2中,辨识的模型参数包括锂电池的欧姆内阻r
si
、锂电池的极化电阻r
tf
、锂电池的极化电容c
tf
、浓差极化电阻r
ts
、浓差极化电容c
ts
以及具有函数关系的锂电池开路电压u
oc
(soc)表达式。
[0024]
优选的,步骤s2中,将10节锂电池并联,采用1c脉冲放电,每放电3min,然后静置
2h,循环放电到截止电压,得到脉冲放电电压曲线和脉冲放电电流曲线,获得锂电池soc和开路电压u
oc
,用matlab进行最小二乘拟合,得到开路电压u
oc
和锂电池soc的函数关系曲线。
[0025]
优选的,步骤s2中,通过对电池脉冲放电的电压响应曲线进行分析,结合电阻电容特性,进行电阻电容的辨识;辨识电阻电容的具体过程为:
[0026]
将电池电压响应曲线分为四个阶段:
[0027]
a-b段:电池从静置开始放电,端电压跳跃式下降,极化电容c
tf
两端的电压u
tf
和浓差极化电容c
ts
两端的电压u
ts
不能发生突变,a-b段电压的突降是由于欧姆内阻r
si
引起的。
[0028]
b-c段:在持续放电期间,电化学极化和浓差极化共同作用,使电压以指数变化的形式下降;在b-c段之前,电压u
tf
和电压u
ts
为零,则b-c段为零状态响应。
[0029]
c-d段:放电电流消失,电池电压回弹,和a-b段同理,c-d段电压回弹由于欧姆内阻r
si
引起的。
[0030]
d-e段:电池静置,由于电化学极化和浓度差作用,使电压缓慢升高,此时无电流放电,d-e段为零输入响应。
[0031]
根据a-b段和c-d段通过下述公式求得欧姆内阻r
si
:
[0032][0033]
式中,ua为电压响应曲线中a点对应的锂电池端电压,ub为电压响应曲线中b点对应的锂电池端电压,uc为电压响应曲线中c点对应的锂电池端电压,ud为电压响应曲线中d点对应的锂电池端电压。
[0034]
根据公式(1)所示模型的状态方程解微分方程得到:
[0035][0036]
式中,u
tf
(0)为极化电容c
tf
两端的初始电压,u
ts
(0)为浓差极化电容c
ts
两端的初始电压。
[0037]
根据d-e段放电电流为零,为零输入响应,将d点作为t=0时刻,得到rc回路的零输入响应表达式为:
[0038][0039]
结合公式(2)所示模型的输出方程,得到零输入响应下的锂电池输出方程为:
[0040][0041]
令u
tf
(0)=b1,u
ts
(0)=b2,公式(8)简化为:
[0042][0043]
用matlab将公式(9)作为拟合函数,对de段进行最小二乘拟合,求得b1,b2,λ1,λ2的值,进而得到τ
tf
,τ
ts
的值。
[0044]
根据b-c段为零状态响应,以b点作为t=0时刻,得到rc回路的零状态响应表达式
为:
[0045][0046]
结合公式(2)所示模型的输出方程,得到零状态响应下的锂电池输出方程为:
[0047][0048]
将通过公式(9)拟合得到的τ
tf
,τ
ts
代入公式(11),将公式(11)作为拟合函数,对b-c段进行最小二乘拟合,求得a1,a2的值,进而通过公式(12)得到电阻r
tf
,r
ts
的值,公式(12)表示为:
[0049][0050]
再根据τ
tf
=r
tfctf
,τ
ts
=r
tscts
求得电容c
tf
,c
ts
的值。
[0051]
优选的,步骤s4中,建立自适应无迹卡尔曼滤波算法,自适应更新计算系统噪声协方差和观测噪声协方差的过程为:
[0052]
对于一个非线性系统,加入系统噪声和观测噪声的状态方程和观测方程表示为:
[0053][0054]
式中,k为当前所处时刻,f(x
k-1
,uk)为非线性系统状态转移方程,g(x
k-1
,uk)为非线性系统观测方程,xk为状态变量,uk为已知输入,yk为观测信号,w为系统噪声,v为观测噪声;
[0055]
根据kf原理,结合公式(4)所示状态空间方程和公式(13)所示状态方程和观测方程,对非线性观测方程在当前状态值处求一阶导数,得到观测矩阵hk为:
[0056][0057]
确定状态值初始值和状态误差协方差初始值p0为:
[0058][0059][0060]
计算sigma点:
[0061][0062]
式中,l为状态向量长度;
[0063]
计算权重:
[0064][0065]
式中,α=0,ki=0,β=2;
[0066]
更新预测状态值
[0067][0068][0069]
更新预测观测值
[0070][0071][0072]
更新系统协方差预测值p
xx|k
:
[0073][0074]
计算新息dk和新息dk的方差
[0075][0076][0077]
式中,w为移动窗口的长度;
[0078]
更新系统噪声协方差qk:
[0079]
qk=k
k-1cdkkk-1t
ꢀꢀꢀ
(26)
[0080]
更新观测协方差预测值p
yy|k
:
[0081][0082]
更新协方差p
xy|k
:
[0083][0084]
计算卡尔曼增益kk:
[0085]
[0086]
更新估计状态值
[0087][0088]
更新估计观测值
[0089][0090]
更新误差协方差值pk:
[0091]
pk=p
xx|k-kkp
yy|kkt
ꢀꢀꢀ
(32)
[0092]
计算残差值rk和残差的方差
[0093][0094][0095]
更新观测噪声协方差rk:
[0096][0097]
与现有技术相比,本发明的优点和积极效果在于:
[0098]
本发明首先对电池建立二阶等效电路模型,通过电池放电的电压响应曲线运用最小二乘法进行参数辨识,将辨识的参数代入模型,用放电脉冲实验进行验证,结果显示模型误差不大于0.8%,为soc估计实验提供了准确的电池模型。其次,采用自适应无迹卡尔曼滤波算法进行电池的soc估计,在处理模型系统噪声和观测噪声不确定时,自适应无迹卡尔曼滤波算法通过监测滤波器中新息和残差的变化,实时更新系统噪声协方差和观测噪声协方差,调整滤波增益,及时对估计值进行修正,估算结果更加精确,误差不大于0.7%,估计精度高,鲁棒性好。
附图说明
[0099]
图1为本发明实施例所述基于自适应无迹卡尔曼滤波的锂电池荷电状态估计方法的流程图;
[0100]
图2为本发明实施例二阶等效电路模型的原理示意图;
[0101]
图3a为本发明实施例所述脉冲放电电压示意图;
[0102]
图3b为本发明实施例所述脉冲放电电流示意图;
[0103]
图4为本发明实施例所述u
oc-soc函数关系曲线示意图;
[0104]
图5为本发明实施例电池脉冲放电的局部放电电压图;
[0105]
图6为本发明实施例电池端电压真实值与模型值对比示意图;
[0106]
图7为本发明实施例电池端电压的模型误差值示意图;
[0107]
图8为本发明实施例aukf算法自适应更新计算系统噪声协方差和观测噪声协方差的流程图;
[0108]
图9为本发明实施例aukf算法中的q值示意图;
[0109]
图10为本发明实施例aukf算法中的r值示意图;
[0110]
图11a为本发明实施例ukf算法和aukf算法估计端电压对比示意图;
[0111]
图11b为本发明实施例ukf算法和aukf算法估计端电压误差对比示意图
[0112]
图12为本发明实施例ukf算法和aukf算法卡尔曼增益对比示意图;
[0113]
图13a为本发明实施例ukf算法和aukf算法估计soc对比示意图;
[0114]
图13b为本发明实施例ukf算法和aukf算法估计soc误差对比示意图。
具体实施方式
[0115]
下面,通过示例性的实施方式对本发明进行具体描述。然而应当理解,在没有进一步叙述的情况下,一个实施方式中的元件、结构和特征也可以有益地结合到其他实施方式中。
[0116]
参见图1,本发明实施例提供了一种基于自适应无迹卡尔曼滤波的锂电池荷电状态估计方法,其步骤为:
[0117]
s1、基于锂电池的二阶等效电路模型获取模型的状态方程和输出方程,并进行离散化得到离散化的二阶等效电路模型的状态空间方程。
[0118]
锂电池的二阶等效电路模型的原理图参见图2。根据基尔霍夫定律,有:
[0119]
二阶等效电路模型的状态方程为:
[0120][0121]
式中,i
bat
为锂电池开路电流,放电为正;q
bat
为锂电池的额定容量;r
si
为锂电池的欧姆内阻;r
tf
为锂电池的极化电阻;c
tf
为锂电池的极化电容;r
ts
为浓差极化电阻;c
ts
为浓差极化电容;u
tf
为极化电容c
tf
两端的电压;u
ts
为浓差极化电容c
ts
两端的电压。
[0122]
二阶等效电路模型的输出方程为:
[0123]ubat
=u
oc
(soc)-r
siibat-u
tf-u
ts
ꢀꢀꢀ
(2)
[0124]
式中,u
bat
为电池端电压;u
oc
(soc)为与soc相关的电池开路电压。
[0125]
根据锂电池的二阶等效电路模型,结合公式(1)和公式(2)得到离散化的二阶等效电路模型的状态空间方程为:
[0126][0127]
式中,τ
tf
=r
tfctf
为快时间常数,τ
ts
=r
tscts
为慢时间常数;
[0128]
令i
bat
(k)=uk,u
bat
(k)=yk,c=[-1
ꢀ‑
1 0],离散化的二阶等效电路模型的状态空间方程简化为:
[0129]
s2、通过电池放电的电压响应曲线、二阶等效电路模型的状态方程和输出方程辨识模型参数。
[0130]
参数识别技术是一种将理论模型与实验数据结合起来用于预测的技术。参数识别根据实验数据建立的模型来确定一组模型的参数值,使得由模型计算得到的数据结果能更好地模拟测试数据,从而可以对位置过程进行预测。
[0131]
本实施例中,通过电池放电响应曲线、二阶等效电路模型的状态方程和输出方程辨识模型参数,待辨识辨识的模型参数包括锂电池的欧姆内阻r
si
、锂电池的极化电阻r
tf
、锂电池的极化电容c
tf
、浓差极化电阻r
ts
、浓差极化电容c
ts
以及具有函数关系的锂电池开路电压u
oc
(soc)表达式。
[0132]
具体地,将10节锂电池(锂电池采用电池型号为samsung 30q inr18650动力锂电池,其具体参数参见表1。)并联,采用1c脉冲放电,每放电3min,然后静置2h,循环放电到截止电压,得到脉冲放电电压曲线(参见图3a)和脉冲放电电流曲线(参见图3b),获得锂电池soc和开路电压u
oc
,锂电池soc和开路电压u
oc
对应关系参见表2。
[0133]
表1
[0134]
参数数值电池型号samsung 30q inr18650额定容量3000mah额定电压3.6v
放电截止电压2.5v重量48.1
±
1.5g尺寸18.2mm(d)
×
65.0mm(h)
[0135]
表2
[0136]uoc
(v)socu
oc
(v)soc4.161713.73170.50344.09130.95033.68920.45374.07490.90073.63960.40404.06060.85103.56770.35434.01530.80133.52080.30463.95920.75173.47120.25503.91640.70203.38600.20533.86870.65243.28800.15563.81630.60273.20370.10593.77350.55303.07470.0563
[0137]
用matlab进行最小二乘拟合,得到开路电压u
oc
和锂电池soc的函数关系式如下:
[0138]uoc
(soc)=122.4786*soc
8-401.4734*soc7+485.6818*soc
6-239.2806*soc5+3.7304*soc4+44.9020*soc
3-19.8057*soc2+5.0932*soc+2.8341
[0139]
拟合得到开路电压u
oc
和锂电池soc的函数关系曲线参见图4。
[0140]
具体地,通过对电池脉冲放电的电压响应曲线进行分析,结合电阻电容特性,进行电阻电容的辨识。辨识电阻电容的具体过程为:
[0141]
电池脉冲放电的局部放电电压图参见图5,将电池电压响应曲线分为四个阶段:
[0142]
a-b段:电池从静置开始放电,端电压跳跃式下降,极化电容c
tf
两端的电压u
tf
和浓差极化电容c
ts
两端的电压u
ts
不能发生突变,a-b段电压的突降是由于欧姆内阻r
si
引起的。
[0143]
b-c段:在持续放电期间,电化学极化和浓差极化共同作用,使电压以指数变化的形式下降;在b-c段之前,电压u
tf
和电压u
ts
为零,则b-c段为零状态响应。
[0144]
c-d段:放电电流消失,电池电压回弹,和a-b段同理,c-d段电压回弹由于欧姆内阻r
si
引起的。
[0145]
d-e段:电池静置,由于电化学极化和浓度差作用,使电压缓慢升高,此时无电流放电,d-e段为零输入响应。
[0146]
根据a-b段和c-d段通过下述公式求得欧姆内阻r
si
:
[0147][0148]
式中,ua为电压响应曲线中a点对应的锂电池端电压,ub为电压响应曲线中b点对应的锂电池端电压,uc为电压响应曲线中c点对应的锂电池端电压,ud为电压响应曲线中d点对应的锂电池端电压;
[0149]
根据公式(1)所示模型的状态方程解微分方程得到:
[0150][0151]
式中,u
tf
(0)为极化电容c
tf
两端的初始电压,u
ts
(0)为浓差极化电容c
ts
两端的初始电压;
[0152]
根据d-e段放电电流为零,为零输入响应,将d点作为t=0时刻,得到rc回路的零输入响应表达式为:
[0153][0154]
结合公式(2)所示模型的输出方程,得到零输入响应下的锂电池输出方程为:
[0155][0156]
令u
tf
(0)=b1,u
ts
(0)=b2,公式(8)简化为:
[0157][0158]
用matlab将公式(9)作为拟合函数,对de段进行最小二乘拟合,求得b1,b2,λ1,λ2的值,进而得到τ
tf
,τ
ts
的值;
[0159]
根据b-c段为零状态响应,以b点作为t=0时刻,得到rc回路的零状态响应表达式为:
[0160][0161]
结合公式(2)所示模型的输出方程,得到零状态响应下的锂电池输出方程为:
[0162][0163]
将通过公式(9)拟合得到的τ
tf
,τ
ts
代入公式(11),将公式(11)作为拟合函数,对b-c段进行最小二乘拟合,求得a1,a2的值,进而通过公式(12)得到电阻r
tf
,r
ts
的值,公式(12)表示为:
[0164][0165]
再根据τ
tf
=r
tfctf
,τ
ts
=r
tscts
求得电容c
tf
,c
ts
的值。
[0166]
通过在matlab中运用最小二乘法辨识得到模型的参数值参见表3。
[0167]
表3
[0168]rsi
(ω)r
tf
(ω)r
ts
(ω)c
tf
(f)c
ts
(f)0.00370.00190.003523340501270
[0169]
s3、将辨识的模型参数代入二阶等效电路模型的状态方程和输出方程,利用脉冲放电作为二阶等效电路模型输入,将二阶等效电路模型输出端电压与实际端电压进行对
比,验证二阶等效电路模型精度。电池端电压真实值与模型值对比参见图6,电池端电压的模型误差值参见图7,模型误差的相关参数参见表4。
[0170]
表4
[0171]
误差类型maermse误差值0.51%0.8%
[0172]
根据图6可以看出模型输出的端电压与实际端电压几乎一致,图7中显示模型的端电压与实际端电压差值在0.05v以内。表4显示了电池模型的端电压的误差计算结果,电池模型的端电压的平均绝对误差(mean absolute error,mae)为0.51%,电池模型的端电压的均方根误差(root mean square error,rmse)为0.8%。由以上数据表明,建立的二阶等效电路模型和辨识的参数是非常合理的,可以用于后续soc估计。
[0173]
s4、建立自适应无迹卡尔曼滤波算法,通过移动窗口法计算新息和残差的方差,自适应更新计算状态空间方程的系统噪声协方差和观测噪声协方差。
[0174]
具体地,参见图8,建立自适应无迹卡尔曼滤波算法(以下简称:aukf算法),自适应更新计算系统噪声协方差和观测噪声协方差的过程为:
[0175]
对于一个非线性系统,加入系统噪声和观测噪声的状态方程和观测方程表示为:
[0176][0177]
式中,k为当前所处时刻,f(x
k-1
,uk)为非线性系统状态转移方程,g(x
k-1
,uk)为非线性系统观测方程,xk为状态变量,uk为已知输入,yk为观测信号,w为系统噪声,v为观测噪声;
[0178]
根据kf原理,结合公式(4)所示状态空间方程和公式(13)所示状态方程和观测方程,对非线性观测方程在当前状态值处求一阶导数,得到观测矩阵hk为:
[0179][0180]
确定状态值初始值和状态误差协方差初始值p0为:
[0181][0182][0183]
计算sigma点:
[0184][0185]
式中,l为状态向量长度;
[0186]
计算权重:
[0187][0188]
式中,α=0,ki=0,β=2;
[0189]
更新预测状态值
[0190][0191][0192]
更新预测观测值
[0193][0194][0195]
更新系统协方差预测值p
xx|k
:
[0196][0197]
k时刻的新息dk定义为实际观测值yk与预测观测值之差,新息dk的表达式为:
[0198][0199]
根据移动窗口法计算新息dk的方差
[0200][0201]
式中,w为移动窗口的长度;
[0202]
更新系统噪声协方差qk:
[0203][0204]
更新观测协方差预测值p
yy|k
:
[0205][0206]
更新协方差p
xy|k
:
[0207][0208]
计算卡尔曼增益kk:
[0209][0210]
更新估计状态值
[0211][0212]
更新估计观测值
[0213][0214]
更新误差协方差值pk:
[0215]
pk=p
xx|k-kkp
yy|kkt
ꢀꢀꢀ
(32)
[0216]
k时刻的残差rk定义为实际观测值yk与估计观测值之差,残差rk的表达式为:
[0217][0218]
根据移动窗口法计算残差rk的方差
[0219][0220]
更新观测噪声协方差rk:
[0221]rk
=c
rk
+hkp
khkt
ꢀꢀꢀ
(35)。
[0222]
本实施例中,状态向量长度l=3,由于系统状态向量的长度为3,qk为3
×
3的对称矩阵。则qk表示为其中,q
12
=q
21
,q
13
=q
31
,q
23
=q
32
。在matlab中使用aukf算法进行soc估计时的qk值参见图9。在matlab中使用aukf算法进行soc估计时的rk值参见图10。
[0223]
需要说明的是,当系统噪声协方差qk过大时,系统协方差预测值增大,状态预测值随之增大,导致估计状态值增大,最终导致soc估计误差变大。因此,系统噪声协方差的值对soc的估计结果有着重要影响。当观测噪声协方差增大时,滤波器增益减小,使得观测误差对状态估计值的影响变小。相反,当观测噪声协方差减小时,滤波器增益增大,这会使得观测误差在估计状态值中的比重增大。因此,观测噪声协方差在修正观测误差对估计结果造成的影响中起到重要作用。本发明建立的自适应无迹卡尔曼滤波算法通过实时监测滤波器中新息和残差的变化,通过移动窗口法计算新息方差和残差方差,通过新息方差实时修正系统噪声协方差,通过残差方差实时修正观测噪声协方差,收敛速度更快,估算结果更加准确。
[0224]
s5、基于建立的自适应无迹卡尔曼滤波算法,利用卡尔曼滤波器估计锂电池的端电压值和锂电池的soc值。
[0225]
具体地,设置aukf算法的初始值:p0=diag([10-5
,10-5
,10-3
]),r=1,x0=[0 0 0.6]
t
,q=10-7
×
eye(3),w=1180。然后,在udds工况条件下用aukf算法进行soc估计。最后,
采用ukf算法进行soc估计,与本发明实施例所述aukf算法soc估计的结果进行对比和分析。ukf算法和aukf算法估计的电池端电压结果对比如图11所示(图11a为端电压对比图,图11b为端电压误差对比图)。ukf算法和aukf算法的soc增益对比如图12所示。ukf算法和aukf算法的soc结果对比如图13所示(图13a为soc对比图,图13b为soc误差对比图)。
[0226]
从图11a可以看出使用aukf算法估计的电池端电压的值比ukf算法估计的端电压的值更接近真实值。从图11b可以看出使用aukf算法估计的端电压误差值要小于ukf算法估计的端电压误差值,并且aukf算法估计的端电压的误差值更加稳定。从图9中可以看出,q的值在开始时变化很大,这是由于soc的初始值引起的系统误差造成的。从图10中可以看出,r的值在一定范围内波动,这是由于观测误差造成的。从图12可以看出aukf算法的卡尔曼增益小于ukf算法的卡尔曼增益,这是由于q的变化改善了系统噪声对估计结果的影响,r的变化改善了观测噪声对估计结果的影响。根据图13a可以得出,使用aukf算法进行估计的soc值更接近于真实值。从13b中可以看出aukf的soc估计误差比ukf的soc估计结果更小,并且aukf算法的收敛速度更快。
[0227]
为了进一步说明aukf算法的准确性,本发明对ukf算法和aukf算法估计的端电压值和soc估计值进行了误差分析,端电压的误差分析结果如表5所示,soc的误差分析结果如表6所示。
[0228]
表5
[0229][0230][0231]
表6
[0232][0233]
根据表5和表6可以得出,aukf算法估计的电压值比ukf算法估计的电压值精度提高了1.05%;对于soc估计,aukf算法比ukf算法更加精确,精度提高了2.6%。由此可以得出,用aukf算法进行soc估计,可以有效解决模型误差和观测误差不确定问题,极大的提高了滤波器的收敛速度,且估算结果也更加精确和稳定,具有很好的鲁棒性。
[0234]
上述实施例用来解释本发明,而不是对本发明进行限制,在本发明的精神和权利要求的保护范围内,对本发明做出的任何修改和改变,都落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1