一种光谱共焦位移传感器自动化多功能标定装置及方法与流程
1.本发明涉及精密测量及传感技术领域,具体涉及一种光谱共焦位移传感器自动化多功能标定装置及方法。
背景技术:
2.光谱共焦位移传感器广泛应用于工业检测领域的距离测量、厚度测量、形貌测量等应用场景中,典型的应用如晶圆面型检测、玻璃厚度测量、粗糙度测量、镜片轮廓检测等。光谱共焦位移传感器具有高精度、非接触、适应不同反射率材料等优点。但在实际测量过程中,光谱共焦位移传感器的光斑大小、测量曲面时的最大可测角度大小,会对使用效果为造成很大影响。此外,探头组装和点胶过程中,由于技术人员操作的不可重复性,不同探头的镜片位置会存在偏差,从而导致测量光路存在差异,导致测量结果不准确。
3.为了保证光谱共焦位移传感器的测量精度和使用性能,需要使用高精度仪器,通过高效的标定方法完成对传感器线性误差、光斑尺寸、极限测量角度等指标进行标定,传统的标定方法,单次标定过程中仅能对线性误差进行标定,光斑尺寸、极限测量角度的标定,还需要将探头重新拆卸后,用额外的仪器进行标定,标定参数的多样化,标定流程的复杂性,极大地限制了光谱共焦位移传感器的生产效率。此外,探头量程不同、测量角度不同,探头的尺寸也存在大小的差异,为了适应不同尺寸的光谱共焦,也要求探头夹持装置和探头位姿调整装置具有通用性和可替换性。
技术实现要素:
4.本发明的目的在于克服现有技术存在的问题,提供一种光谱共焦位移传感器自动化多功能标定装置及方法,在同一个标定系统中,完成光谱共焦探头多个参数的标定,在进行光谱共焦探头不同参数的标定时,探头位姿的变换都通过电动控制实现,极大地提高了探头标定的自动化程度和标定技术人员的工作效率。
5.为实现上述技术目的,达到上述技术效果,本发明通过以下技术方案实现:一种光谱共焦位移传感器自动化多功能标定装置,包括:激光干涉仪,所述激光干涉仪的发射光路上设有激光反馈模块,使得激光干涉仪发出的激光由激光反馈模块返回,用于测量激光反馈模块的位置;所述激光反馈模块设置在第一电动运动台上且由第一电动运动台控制移动,所述第一电动运动台上设有线性标定反射镜,并且所述第一电动运动台控制线性标定反射镜与激光反馈模块同步移动,使得激光反馈模块与线性标定反射镜的位置相对固定;所述线性标定反射镜反射光谱共焦探头发出的白光,用于表征光谱共焦探头位移测量值,实现与激光干涉仪位移测量值的对比;所述第一电动运动台的一侧设有与其相垂直的第二电动运动台,所述第二电动运动台上移动控制有探头水平角度调节台;所述光谱共焦探头:
设置在探头水平角度调节台上且由探头水平角度调节台控制转动,用于极限角度测量和光斑尺寸测量;或者设置在探头固定台上,用于线性标定。
6.进一步的,所述探头水平角度调节台的外侧设有极限角度标定台,用于极限角度测量时,由探头水平角度调节台调整光谱共焦探头的出光口对准极限角度标定台,所述探头水平角度调节台的内侧设有标定棋盘格,并且所述标定棋盘格由第一电动运动台控制其沿着与第二电动运动台相垂直的方向移动,用于在极限角度测量完成后,探头水平角度调节台控制光谱共焦探头转动度,使其出光口对准标定棋盘格,使得标定棋盘格能够返回光谱共焦探头测量光束,进行光斑尺寸测量。
7.进一步的,所述探头固定台设置在第一电动运动台的外端,使得所述激光干涉仪、激光反馈模块、线性标定反射镜、光谱共焦探头位于同一直线上,且激光干涉仪的测量光束与光谱共焦探头的测量光束共线,用于线性标定。
8.进一步的,所述极限角度标定台转动地设置在相应的机架上,使得极限角度标定台相对于光谱共焦探头的角度可调节。
9.进一步的,所述探头固定台通过其上设置的v形槽对光谱共焦探头进行夹持,用以适用不同长度不同直径的光谱共焦探头。
10.进一步的,所述光谱共焦探头通过光纤与光谱共焦控制器相通信连接,所述光谱共焦控制器与上位机相网络通信连接,用于数据采集,所述上位机分别连接第一电动运动台、第二电动运动台、探头水平角度调节台、极限角度标定台和激光干涉仪,用于控制相应的动作进行位姿调节。
11.一种利用光谱共焦位移传感器自动化多功能标定装置的检测方法,该方法包括极限角度测量和光斑尺寸测量,其中:所述极限角度测量方法为:设定光谱共焦探头的光轴与极限角度标定台不垂直时,极限角度标定台相对于垂直位置可转动的最大角度为极限角度,上位机控制极限角度标定台转动,同时向光谱共焦控制器发送指令读取位移测量数据,光谱共焦控制器的测量数据跳变为无效值时,上位机读取极限角度标定台的角度,角度即为光谱共焦探头的极限测量角度;所述光斑尺寸测量方法为:标定棋盘格由第一电动运动台控制在光谱共焦探头光轴垂直方向上运动,通过上位机向光谱共焦控制器发送指令读取光强度,标定棋盘格由黑白相间的方格组成,光谱共焦探头测量光束在标定棋盘格上不同颜色的方格反映的光强不同,根据光强在黑白方格交界时的跳变,实现光斑尺寸的测量标定。
12.进一步的,该方法还包括线性标定,所述线性标定方法为:首先将光谱共焦探头固定于探头固定台上,使得光谱共焦探头的测量光束与激光干涉仪的测量光束共线,第一电动运动台控制线性标定反射镜沿光谱共焦探头测量光束方向移动,以峰定位算法是否检测到有效测量峰值为定位判据,分别定位到光谱共焦探头量程的近端和远端;定位到光谱共焦探头量程的近端和远端后,以远端和近端位置的中点为零点,将激光干涉仪和光谱共焦探头的测量值归零,然后通过第一电动运动台控制线性标定反射镜移动到光谱共焦探头量程的近端,设定第一电动运动台的步进距离为d,运动速度为v,取光
谱共焦探头的实际量程为d,则扫描过程中探头全量程内取n= d/d个测量位置进行采样;通过上位机控制第一电动运动台以量程的近端为起点,朝量程的远端步进运动,每步进到一个测量点,上位机对光谱共焦控制器和激光干涉仪进行采样,保存到上位机中;全量程扫描完成后,便得到n个采样点的光谱共焦探头和激光干涉仪的位移测量偏差。
13.进一步的,在获取所有采样点的光谱共焦探头和激光干涉仪的位移测量值后,通过样条曲线拟合得到光谱共焦探头的位移测量值与激光干涉仪的位移测量值的非线性关系式,然后在光谱共焦探头量程的近端与远端之间进行等间隔采样,通过非线性关系式生成光谱共焦探头的位移测量值与激光干涉仪的位移测量值之间的映射标定表,将映射标定表上传至光谱共焦控制器中,从而大幅度提高光谱共焦位移传感器的测量精度。
14.本发明的有益效果是:本发明在同一个标定系统中实现了光谱共焦探头的线性误差、极限测量角度、光斑尺寸参数的标定,探头位姿的变换都通过电动控制实现,电动控制标定机构的位置或角度可反馈给上位计算机,极大地提高了探头标定的自动化程度和标定技术人员的工作效率。
15.其中线性误差标定结果可生成映射标定表作为光谱共焦传感器位移测量值的补偿,从而大幅度提高光谱共焦位移传感器测量精度。
16.极限测量角度标定结果,可用于光谱共焦传感器测量曲面形貌时的法线方向调整范围参考。
17.光斑尺寸标定结果,可用于光谱共焦传感器测量粗糙度、微沟槽深度等场景的横向分辨率参考。
18.光谱共焦探头多个参数在同一系统中实现标定,可通过参数标定结果及时地反馈光谱共焦探头装配是否存在问题,有效地提高了光谱共焦探头生产的良品率。
附图说明
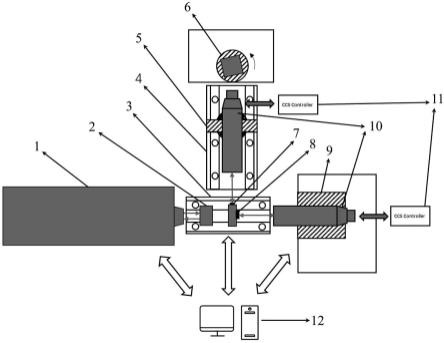
19.图1是光谱共焦传感器自动化多功能标定装置原理示意图;图2是光谱共焦传感器自动化多功能标定装置结构示意图;图3是光谱共焦位移传感器极限角度标定原理示意图;图4是光谱共焦位移传感器光斑尺寸标定原理示意图。
20.图中标号说明:1、激光干涉仪,2、激光反馈模块,3、第一电动运动台,4、第二电动运动台,5、探头水平角度调节台,6、极限角度标定台,7、标定棋盘格,8、线性标定反射镜,9、探头固定台,10、光谱共焦探头,11、光谱共焦控制器,12、上位机,13、测量光束,14、反射光束。
具体实施方式
21.下面将参考附图并结合实施例,来详细说明本发明。
22.如图1和图2所示,一种光谱共焦位移传感器自动化多功能标定装置,包括:激光干涉仪1,所述激光干涉仪1的发射光路上设有激光反馈模块2,使得激光干涉仪1发出的激光由激光反馈模块2返回,用于测量激光反馈模块2的位置;
所述激光反馈模块2设置在第一电动运动台3上且由第一电动运动台3控制移动,所述第一电动运动台3上设有线性标定反射镜8,并且所述第一电动运动台3控制线性标定反射镜8与激光反馈模块2同步移动,使得激光反馈模块2与线性标定反射镜8的位置相对固定,因此激光干涉仪1测量得到的激光反馈模块2的位移也可看作线性标定反射镜8的位移;所述线性标定反射镜8反射光谱共焦探头10发出的白光,用于表征光谱共焦探头10位移测量值,实现与激光干涉仪1位移测量值的对比;所述第一电动运动台3的一侧设有与其相垂直的第二电动运动台4,所述第二电动运动台4上移动控制有探头水平角度调节台5;所述光谱共焦探头10:设置在探头水平角度调节台5上且由探头水平角度调节台5控制转动,用于极限角度测量和光斑尺寸测量;或者设置在探头固定台9上,用于线性标定。
23.所述探头水平角度调节台5的外侧设有极限角度标定台6,用于极限角度测量时,由探头水平角度调节台5调整光谱共焦探头10的出光口对准极限角度标定台6,在本实施例中,如图3所示,极限角度标定台6位于初始位置时,与光谱共焦探头10发出的测量光束14垂直,光谱共焦探头10发出的测量光束13由极限角度标定台6反射后原路返回;极限角度标定台6位于倾斜位置时,光谱共焦探头10发出的测量光束13由极限角度标定台反射后不再原路返回,反射光束14与原光束成一定角度返回,反射光束位于光谱共焦探头10接收范围之内时,此时仍然可以进行测量;当倾斜角度持续增加,会存在一个角度,当大于该角度时,反射光束14将超出光谱共焦探头10接收范围,角度即为探头测量极限角度。
24.所述探头水平角度调节台5的内侧设有标定棋盘格7,并且所述标定棋盘格7由第一电动运动台3控制其沿着与第二电动运动台4相垂直的方向移动,用于在极限角度测量完成后,探头水平角度调节台5控制光谱共焦探头10转动180度,使其出光口对准标定棋盘格7,使得标定棋盘格7能够返回光谱共焦探头10的测量光束13,进行光斑尺寸测量,通过标定棋盘格7的步进运动来实现光斑尺寸的测量,光斑尺寸的测量在可在两个垂直的方向分别进行测量,在本实施例中,如图4所示,标定棋盘格7由第一电动运动台3控制在与光谱共焦探头10光轴相垂直方向上运动,通过上位机12向光谱共焦控制器11发送指令读取光强度,标定棋盘格7由黑白相间的方格组成,光谱共焦探头10测量光束在标定棋盘格7上不同颜色的方格反映的光强不同,根据光强在黑白方格交界时的跳变,便可实现光斑尺寸的标定。
25.所述探头固定台9设置在第一电动运动台3的外端,使得所述激光干涉仪1、激光反馈模块2、线性标定反射镜8、光谱共焦探头10位于同一直线上,且激光干涉仪1的测量光束与光谱共焦探头10的测量光束13共线,用于线性标定,在进行线性误差标定时,第一电动运动台3控制线性标定反射镜8沿激光干涉仪1与光谱共焦探头10共线方向大范围运动,在进行光斑尺寸标定时,第一电动运动台3控制标定棋盘格7沿与第二电动运动台4相垂直方向小范围运动,使标定棋盘格7能够返回光谱共焦探头10的测量光束13,第二电动运动台4可控制光谱共焦探头10运动,使标定棋盘格7位于光谱共焦探头10的量程范围内。
26.所述极限角度标定台6转动地设置在相应的机架上,使得极限角度标定台6相对于光谱共焦探头10的角度可调节。
27.所述探头固定台9通过其上设置的v形槽对光谱共焦探头10进行夹持,v形槽的开口宽度、张角、固定位置可自由调节,用以适用不同长度不同直径的光谱共焦探头10。
28.所述光谱共焦探头10通过光纤与光谱共焦控制器11相通信连接,所述光谱共焦控制器11与上位机12相网络通信连接,用于数据采集,所述上位机12分别连接第一电动运动台3、第二电动运动台4、探头水平角度调节台5、极限角度标定台6和激光干涉仪1,用于控制相应的动作进行位姿调节,其中,第一电动运动台3、第二电动运动台4可由上位机12控制进行直线运动,探头水平角度调节台5、极限角度标定台6可由上位机12控制进行转动。
29.一种利用光谱共焦位移传感器自动化多功能标定装置的检测方法,该方法包括极限角度测量和光斑尺寸测量,其中:所述极限角度测量方法为:设定光谱共焦探头10的光轴与极限角度标定台6不垂直时,极限角度标定台6相对于垂直位置可转动的最大角度为极限角度,上位机12控制极限角度标定台6转动,同时向光谱共焦控制器11发送指令读取位移测量数据,光谱共焦控制器11的测量数据跳变为无效值时,上位机12读取极限角度标定台6的角度,角度即为光谱共焦探头10的极限测量角度;所述光斑尺寸测量方法为:标定棋盘格7由第一电动运动台3控制在光谱共焦探头10光轴垂直方向上运动,通过上位机12向光谱共焦控制器11发送指令读取光强度,标定棋盘格7由黑白相间的方格组成,光谱共焦探头10的测量光束13在标定棋盘格7上不同颜色的方格反映的光强不同,根据光强在黑白方格交界时的跳变,实现光斑尺寸的测量标定。
30.该方法还包括线性标定,所述线性标定方法为:首先将光谱共焦探头10固定于探头固定台9上,使得光谱共焦探头10的测量光束13与激光干涉仪1的测量光束共线,第一电动运动台3控制线性标定反射镜8沿光谱共焦探头10的测量光束13方向移动,以峰定位算法是否检测到有效测量峰值为定位判据,分别定位到光谱共焦探头10量程的近端和远端;定位到光谱共焦探头10量程的近端和远端后,以远端和近端位置的中点为零点,将激光干涉仪1和光谱共焦探头10的测量值归零,然后通过第一电动运动台3控制线性标定反射镜8移动到光谱共焦探头10量程的近端,设定第一电动运动台3的步进距离为d,运动速度为v,取光谱共焦探头10的实际量程为d,则扫描过程中探头全量程内取n= d/d个测量位置进行采样;通过上位机12控制第一电动运动台3以量程的近端为起点,朝量程的远端步进运动,每步进到一个测量点,上位机12对光谱共焦控制器11和激光干涉仪1进行采样,保存到上位机12中;全量程扫描完成后,便得到n个采样点的光谱共焦探头10和激光干涉仪1的位移测量偏差。
31.在获取所有采样点的光谱共焦探头10和激光干涉仪1的位移测量值后,通过样条曲线拟合得到光谱共焦探头10的位移测量值与激光干涉仪1的位移测量值的非线性关系式,然后在光谱共焦探头10量程的近端与远端之间进行等间隔采样,通过非线性关系式生成光谱共焦探头10的位移测量值与激光干涉仪1的位移测量值之间的映射标定表,将映射标定表上传至光谱共焦控制器11中,从而大幅度提高光谱共焦位移传感器的测量精度。
32.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技
术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1