一种线性和非线性调频雷达信号的实时识别方法与流程
1.本发明涉及雷达信号分选领域,特别是涉及一种线性和非线性调频雷达信号的实时识别方法。
背景技术:
2.现有技术中雷达辐射源信号包括的脉内调制方式有:cw、lfm、nlfm、bpsk、qpsk、bfsk、qfsk,其中cw、bpsk、qpsk为单载波调制信号,通过现有高阶谱方式较容易区分;bfsk、qfsk通过瞬时频率统计也较容易区分;而其中lfm为线性调频,nflm为非线性调频,两者都为大时宽带宽积信号,具有宽带雷达信号的特点,两者时域和频域特征较为接近,较难区分,而且nflm非线性调频雷达信号包含s形、v形、抛物线形等多种样式,一般的时域分析法、频域分析法、时频域分析法、谱相关法等很难全部覆盖,对于新的未知非线性形状也很难自适应,而深度学习方法实时性又不强。
技术实现要素:
3.发明目的:本发明的目的是提供一种有效的将线性调频雷达信号与非线性调频雷达有效地区分开的线性和非线性调频雷达信号的实时识别方法。
4.技术方案:为实现上述目的,本发明所述的线性和非线性调频雷达信号的实时识别方法包括如下步骤:
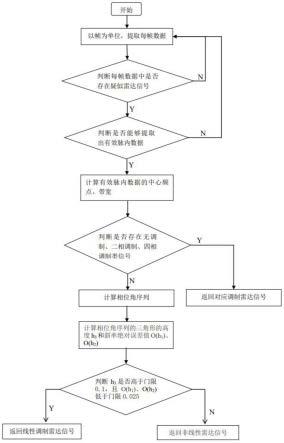
5.步骤s1:以帧为单位,提取每帧数据;
6.步骤s2:判断每帧数据中是否存在疑似雷达信号,若判断是,执行步骤s3,否则返回步骤s1;
7.步骤s3:判断疑似雷达信号是否能够提取出有效脉内数据,若判断是,执行步骤s4,否则返回步骤s1;
8.步骤s4:计算有效脉内数据的中心频点、带宽;
9.步骤s5:判断有效脉内数据是否存在无调制、二相调制、四相调制类信号,若判断否,执行步骤s6,若判断是,就给出对应的调制雷达信号;
10.步骤s6:根据中心频点、带宽、采样率、有效脉内数据,计算得到相位角序列;
11.步骤s7:计算相位角序列的三角形的高度及斜率绝对误差值,从而判断有效脉内数据是线性调频雷达信号或非线性调频雷达信号,即当h3高于门限0.1,o(h1)和o(h2)低于门限0.025时,h3为相位角序列三角形斜边高度,o(h1)和o(h2)为线性调频理论值的误差绝对值,判断为线性调频雷达信号;否则为非线性调频雷达信号。
12.所述步骤s1以帧为单位,提取每帧数据具体为:记{x(t),t=1,2,......},t为采集时间变量参数,为采样率fs下得到的采样数据,每间隔0.1ms时长,取0.2ms时长的采样数据为一帧,记第i帧数据为{xi(n),n=1,2,......,m;i=1,2,......},n为采集列数,m为数据长度,i为帧号。
13.所述步骤s2判断每帧数据中是否存在疑似雷达信号具体为:当前帧数据幅值得最
大值超过幅值均值的2倍时,即max(abs(xi(n)))>2*mean(abs(xi(n))),n=1,2,......m;i=1,2......,m为数据长度,成立时,说明当前帧存在疑似信号,执行步骤3,否则丢弃该帧,返回步骤s1。
14.所述步骤s3判断疑似雷达信号是否能够提取出有效脉内数据包括以下子步骤:
15.步骤s301:计算当前帧的幅值序列得ai(n)=abs(xi(n)),n=1,2,......m;i=1,2......,进行平滑处理得对平滑后序列计算门限
[0016][0017]
n=1,2,......m;i=1,2......,再提取高于门限的幅值位置所对应的采集数据,记为m为采集列数;
[0018]
步骤s302:假设雷达最大脉宽最小脉宽分别为:l
max
和l
min
,当提取到的脉宽长度l满足l
min
<l<l
max
时,认为成功检测到有效脉内数据,然后提取当前帧数据{xi(n),n=1,2,......,m;i=1,2,......}与所在下标对应的有效脉冲数据,记为否则丢弃该帧,返回步骤s1。
[0019]
所述步骤s4计算有效脉内数据的中心频点、带宽包括以下子步骤:
[0020]
步骤s401:已知本振频点和采样率,先对有效脉内数据进行fft变换得频域数据一次谱,记为f为频率变量;
[0021]
步骤s402:对频域数据一次谱计算幅值,并取对数,得s1(f)=10*log10(abs(x(f)2)),f=-fs/2,-fs/2+f
step
,......,fs/2,其中fs为采样率;
[0022]
再计算10-db门限得threshold2=max(s(f))-10;
[0023]
步骤s403:提取高于门限的数据得b(f’)={s1(f),s1(f)>threshold2,f=-fs/2,-fs/2+f
step
,......,fs/2,f’=f1,f2,....fk},k为高于门限数据系数,则该有效脉内数据的带宽为门限以上的频谱长度bwi=f’k-f
’1,中心频点为门限以上频谱的中心点
[0024]
所述步骤s5判断有效脉内数据是否存在无调制、二相调制、四相调制类信号包括以下子步骤:
[0025]
步骤s501:在步骤s401已计算过一次谱现计算二次谱和四次谱再取幅值平方和对数
[0026]
s2(f)=10*log10(abs(x2(f)2)),s4(f)=10*log10(abs(x4(f)2));计算谱峰系数
[0027][0028]
步骤s502:判断当k1>2.5,则为无调制类雷达信号,当k2>2.5,则为二相调制类雷
达信号,当k4>2.5,则为四相调制类雷达信号,返回对应调制雷达信号;否则执行步骤s6。
[0029]
所述步骤s6计算相位角序列包括以下子步骤:
[0030]
步骤s601:根据中心频点fci和采样率fs,对脉内数据进行频谱搬移,将采样数据搬成零中频的采样数据,记为{data(m),m=1,2,......,l};
[0031]
步骤s602:根据频谱带宽bwi和采样fs,计算最大码片延时delay,其中计算式为:进一步的令delay最小值为2,即当delay《2时,直接令delay=2;
[0032]
步骤s603:提取有效脉冲数据的偏移数据
[0033]
datad={data(m1),m1=delay+1,delay+2,......,l},
[0034]
和起始数据datas={data(m2),m2=1,2,......,l-delay},再计算起始数据共轭得data
*
(m2)=conj(datas(m2)),m1、m2为采集列数;
[0035]
步骤s604:将向量datad(m2)和向量进行点乘,得复数序列再通过反正切三角函数,计算复数序列data
new
(m2)的相位角得到有效脉内信号的相位角序列{y(m2),m2=1,2,......,l2},其中l2=l-delay,即
[0036]
所述步骤s7判断有效脉内数据是线性调频雷达信号或非线性调频雷达信号包括以下子步骤:
[0037]
步骤s701:计算相位角序列三角形斜边偏差{y(m2),m2=1,2,......,l2},其中l2=l-delay,先以序列下标为坐标横轴,以相位角值为纵轴,再以(m2,y(m2))为斜边构成一个不规则区域;然后将不规则区域的横轴所在边等分成三段,分割线所在横作为位置分别记为{p1,p2,p3},其中p3=l2,{p1,p2,p3}位置对应的相位角序列{y(m2),m2=1,2,......,l2}所在值,即不规则边的高分别记为{h1,h2,h3},其中{h
index
=y(p
index
)-y(1),index=1,2,3};
[0038]
步骤s702:假设捕获信号为线性调频雷达信号时,{y(m2),m2=1,2,......,l2}为一个单调递增或递减序列,该不规则区域为一个直角三角形区域,根据直角三角形性质可知,三条高的比例关系满足:故当h3已知情况下,可以推出h1和h2的理论值分别为
[0039]
步骤s703:有效脉内数据是线性调频雷达信号还是非线性调频雷达信号根据h1、h2计算值与线性调频理论值的误差绝对值o(h1)和o(h2)来判断,即当h3高于门限0.1,o(h1)和o(h2)低于门限0.025时,为线性调频雷达信号;否则为非线性调频雷达信号。
[0040]
有益效果:1、本发明提供的一种线性和非线性调频雷达信号的实时识别方法,通过提取雷达接收机的每帧数据,对数据依次进行提取有效脉内数据,判断是否是其他调制类信号,计算中心频点、带宽得到相位角序列,对相位角序列三角形的高度h3和线性调频理
论值的误差绝对值o(h1)和o(h2)计算,最终根据h3,o(h1),o(h2)判断出是线性调频雷达信号或非线性调频雷达信号,计算过程简单,可实时处理,同时对硬件性能要求不高,在实现本发明的功能同时也不会增加硬件设备的成本,性价比高;
[0041]
2、本发明对提取过的有效脉内数据进行fft变换,进一步计算谱峰系数,根据谱峰系数能识别出是无调制、二相调制、四相调制类信号,识别范围广,灵活性高,从功能上能提高硬件设备的集成度,适用于多种雷达信号的识别;
[0042]
3、本发明能识别出s形、v形、抛物线形多种样式的非线性调频雷达信号,识别精度高;
附图说明
[0043]
图1为线性和非线性调频雷达信号识别流程图;
[0044]
图2为平滑和脉宽数据提取系统图;
[0045]
图3为频点和带宽估计系统图;
[0046]
图4为非线性调频一/二/四次谱系数系统图;
[0047]
图5为线性调频相位序列三角形斜率偏差系统图;
[0048]
图6为非线性调频1相位序列三角形斜率偏差系统图;
[0049]
图7为非线性调频2抛物线形非线性调频相位序列三角形斜率偏差系统图;
[0050]
图8为非线性调频3“v”形非线性调频相位序列三角形斜率偏差系统图;
[0051]
图9为非线性调频4“s”形非线性调频相位序列三角形斜率偏差系统图。
具体实施方式
[0052]
下面结合实施例和附图对本发明的技术方案作详细说明。
[0053]
如图1所示,雷达接收机频点为5ghz,采样率fs为2.4ghz。
[0054]
步骤s1:对接收到的数据以0.2ms为一帧进行实时处理,提取每帧数据,记第i帧数据为{xi(n),n=1,2,......,m;i=1,2,......},n为采集列数,m为数据长度,i为帧号。
[0055]
步骤s2:判断每帧数据中是否存在疑似雷达信号,先计算每帧数据的幅值,提取幅值得最大值和均值,如较弱信号条件下计算得幅值最大值为183.9991,均值为74.8298,则满足说明可能存在疑似雷达信号,执行步骤s3;否则说明当前帧没有信号,返回步骤s1,提取下一帧数据进行处理。
[0056]
步骤s3:如图2所示,对存在信号的数据帧计算门限,提取有效脉内数据,由于信号不强,故首先对帧内信号幅值进行平滑,使用64长度的平滑窗;然后对平滑后的幅值计算门限,为了防止脉宽过小时被拉平的情况出现,故脉宽判决门限为max(幅值均值,最大幅值的*25%),如计算门限得threshold1=37.45,然后提取高于门限幅值位置为7811~43830,脉宽l为(43830-7811)/fs=15us,满足l
min
<l=36023<l
max
,其中已知l
min
=fs*5us=12000,l
max
=fs*100us=2.4*105,可以判断成功检测到有效脉内数据,提取脉宽所在下标对应的输入采样数据,执行步骤s4。
[0057]
步骤s4:对提取到的有效脉内数据计算中心频点和带宽,假设提取到的脉内数据为m为采集列数,首先进行傅叶变换得f为频率
变量,然后计算功率谱转换为db值,得s1(f)=10*log10(abs(x(f)2)),f=-fs/2,-fs/2+f
step
,......,fs/2,然后提取功率谱最大值max(s(f))=-2.946db,进一步得门限threshold2=max(s(f))-10=-12.946db,然后提取高于门限的功率谱下标位置,定义为b(f’)={s1(f),s1(f)>threshold2,f=-fs/2,-fs/2+f
step
,......,fs/2,f’=f1,f2,....fk},k为高于门限数据系数,则有效脉内数据的中心频点为有效带宽为bw=f’k-f
’1=24.463mhz,如图3所示,进一步的执行步骤s5。
[0058]
步骤s5:判断有效脉内数据是否存在无调制、二相调制、四相调制类信号,由步骤s3已知s1(f)=10*log10(abs(x(f)2)),f=-fs/2,-fs/2+f
step
,......,fs/2,同理再分别计算有效脉内数据的二次谱和四次谱,得s2(f)=10*log10(abs(x2(f)2))和s4(f)=10*log10(abs(x4(f)2)),然后分别计算一次谱、二次谱、四次谱的谱峰系数,得k1=1.5537,k2=1.5295,k4=1.5548,如图4所示,均大于判决门限2.5,故该脉内数据调制方式为线性调频方式或非线性调频方式,需进一步判断,执行步骤s6;否则则为无调制、二相调制、四相调制方式。
[0059]
步骤s6:根据中心频点、带宽、采样率、有效脉内数据,计算得到相位角序列,先根据步骤s4计算得到的fc=414.4khz值,对脉内有效采样数据进行频谱搬移,将数据中心频点搬移到零频的位置,记为{data(m),m=1,2,......,36023};
[0060]
根据步骤s4的带宽估计值bw=24.463mhz,及采样率fs=2.4ghz,根据最大延时计算公式,进一步计算得码片;
[0061]
根据计算所得码片延时delay=19,则偏移19个码片数据得datad={data(m1),m1=20,21,......,36023},与不偏移数据datas={data(m2),m2=1,2,......,36004}的共轭点乘,得data
new
(m2)=datad(m2).*(m2),m1、m2为采集列数;
[0062]
再通过反正切三角函数,计算复数序列data
new
(m2)的相位角得有效脉冲信号的相位角序列y(m2),即
[0063]
步骤s7:计算相位角序列的三角形的高度及斜率绝对误差值,从而判断有效脉内数据是线性调频雷达信号或非线性调频雷达信号。
[0064]
如图5至图9所示,针对序列y(m2),以序列下标为坐标横轴,以相位角值为纵轴,再以(m2,y(m2))为斜边构成一个不规则区域;然后将不规则区域的横轴所在边等分成三段,分割线所在横作为位置分别记为{p1=9536,p2=19072,p3=28608},为了减小瞬时频率波动的影响,用p
index
左右一定范围内的斜边的均值代替p
index
所在位置斜率值,即k采集列数,n为数据长度,从而分别得又已知y(1)=-0.5019,则计算得{h1=0.1434,h2=0.4479,h3=0.8737},如果信号为线性调频雷达,则三条高理论值应为故得斜率误差绝对值为{o(h1)=0.1478,o(h2)=
0.1346}均大于门限0.025,则说明该信号为非线性调频雷达信号。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1