一种水平位移自动监测系统及监测方法与流程
1.本发明涉及利用力的测量进行土体位移监测技术领域,具体涉及一种水平位移自动监测系统及监测方法。
背景技术:
2.滑坡是一种全球范围内危害严重的地质灾害,随着人类工程活动的日趋频繁,滑坡地质灾害也变得越来越频发,造成的损失也越来越大。为了有效防治滑坡,而滑坡位移的监测就是一项重要的监测内容和实施手段。
3.当前国内外对土体的位移测量装置主要有水管式沉降仪、固定式测斜仪、压力传感器、静力水准仪等几种,这些装置都存在这样那样的技术缺陷,有的可实现自动监测但测量的可靠性差或易于出现故障需要经常维护,有的可靠性较好但不能实现连续自动测量或远程遥测,或者受繁琐的施工工序及安装步骤的限制,往往在装置安装后不能立即获取土体位移数据或者不能随施工回填获取土体位移数据,待具备测量条件时已错过主要的沉降期。有的滑坡测斜仪器,测量精度很高,也能实现自动化监测,但是由于测量原理的限制,使得测斜仪测量的量程很有限,在滑坡滑动面产生大的位移变化的情况下,不能继续测量,测斜仪的传感器是布设在测量的钻孔内,该传感装置与数据采集装置是通过数据线连接,当滑动面挫断测斜管时,也不能继续测量,因此对于边坡的长期大量程的监测有着不可弥补的缺点。
4.例如现有技术中,专利文献cn108548730b公开了基于传递系数法和表面位移的滑坡稳定性评价方法。该方法包括将待评价滑坡划分为n个垂直滑块、确定各滑块的应力状态、计算各个滑块底部滑带剪切位移、根据滑带剪切位移计算的滑坡稳定性系数等步骤。该方法基于传递系数法和滑坡实测表面位移数据,建立了滑坡表面位移与滑坡稳定性之间的关系,可通过位移数据对滑坡进行稳定性评价,更好地为滑坡实时监测服务。但是该技术方案难以根据实际的应力状态的改变,评估位移实际情况。
技术实现要素:
5.为了解决上述技术问题,本发明提出了一种水平位移自动监测方法,包括:将多个水平位移自动监测装置主体依次安装到待监测土体区域的基坑管道内,用于监测所处位置的土体位移引起的滑移力;水平位移自动监测装置的分析处理器计算单位时间段内水平位移自动监测装置主体的位移量,对多个连续单位时间段内所述水平位移自动监测装置主体的位移量进行拟合,获得在多个连续单位时间段内的水平位移自动监测装置主体所处土体的累计位移数据;中央处理器根据多个水平位移自动监测装置获得的不同位置处土体的累计位移数据计算多个连续单位时间段内的待监测土体区域整体的累积水平位移曲线。
6.进一步地,所述计算单位时间段内水平位移自动监测装置主体的位移量,包括:
水平位移自动监测装置主体所受滑移力为f,滑移力f的水平方向分量为fx,水平方向分量为fy,由水平位移自动监测装置主体的受力平衡条件,得到:;;式中,l为水平位移自动监测装置主体的长度,mx和my分别为弯矩m的水平方向分量和竖直方向分量;由水平位移自动监测装置主体的主体形变方程,得到:;;式中,e为水平位移自动监测装置主体的弹性模量;i为水平位移自动监测装置主体的惯性矩;x和y分别为单位时间段内水平位移自动监测装置主体在水平和竖直方向的位移量,为水平位移自动监测装置主体与竖直方向的倾角,c为常数。
7.进一步地,所述对多个连续单位时间段内所述水平位移自动监测装置主体的位移量进行拟合,获得在多个连续单位时间段内的水平位移自动监测装置主体所处土体的累计位移数据,包括:设3个连续单位时间段内水平位移自动监测装置主体在水平方向的位移量分别为x1,x2,x3,采用多项式进行拟合,得到3个连续单位时间段内土体累积水平位移x,拟合方程为:
ꢀꢀꢀꢀ
(1);设3个累积时间段的水平位移自动监测装置主体所处的土体的累积水平位移为x1,x2,x3,则拟合矩阵为:
ꢀꢀꢀꢀ
(2):用x’代替式(2)中,用a代替式(2)中,用b代替式(2)中,则式(2)可写成:x’=ba
ꢀꢀꢀꢀ
(3);在式(3)两端同时乘上b
t
,b
t
是b的转置矩阵;b
t
x’=b
t
ba
ꢀꢀꢀꢀ
(4);用c代替b
t
b,用c的逆矩阵c-1
分别乘式(4)两边,则有:c-1bt
x’=c-1
ca
ꢀꢀꢀꢀ
(5);将由式(5)求得的待定系数a0,a1,a2,a3代入式(1),计算3个连续单位时间段内土
体累积水平位移x;按照上述步骤计算3个连续单位时间段内土体的累积竖直位移y。
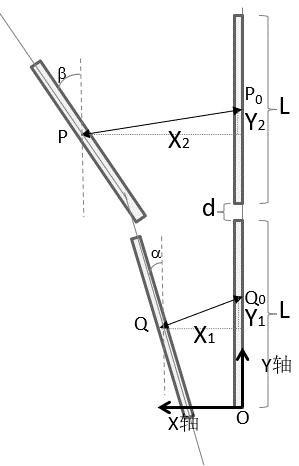
8.进一步地,所述质心位移算法具体包括:设水平位移自动监测装置主体的长度为l,两个水平位移自动监测装置的间距为d,两个水平位移自动监测装置主体的初始质心分别用a0和b0表示,初始质心a0的坐标设为,初始质心b0的坐标设为;两个水平位移自动监测装置主体在3个连续单位时间段内发生位移后的质心分别用a和b表示;质心a相比于质心a0累积水平位移为x2,累积竖直位移为y2;质心b相比于质心b0累积水平位移为x1,累积竖直位移为y1;则质心a的坐标为,质心b的坐标为;质心为a的水平位移自动监测装置主体的倾角为,质心为b的水平位移自动监测装置主体的倾角为;中央处理器根据水平位移自动监测装置主体的倾角和、水平位移自动监测装置主体的质心a和质心b的坐标位置以及水平位移自动监测装置主体的长度绘制3个连续单位时间段内的待监测土体区域整体的累积水平位移曲线。
9.本发明还提出了一种水平位移自动监测系统,用于实现水平位移自动监测方法,其特征在于,包括:多个水平位移自动监测装置、中央处理器和接收仪表;所述多个水平位移自动监测装置位于待监测土体区域的基坑管道内,用于获得在多个连续单位时间段内的水平位移自动监测装置主体所处土体的累计位移数据;所述中央处理器用于接收所述多个水平位移自动监测装置获取的多个连续单位时间段内的累计位移数据,采用质心位移算法计算多个连续单位时间段内的待监测土体区域整体的累积水平位移曲线,并发送至所述接收仪表。
10.进一步地,水平位移自动监测装置包括:水平位移自动监测装置主体、起重电机、分析处理器和服务器;所述起重电机将水平位移自动监测装置主体缓慢下至基坑管道的内部;所述水平位移自动监测装置主体用于监测所处位置的土体位移引起的滑移力和倾斜角度;所述分析处理器用于计算多个连续单位时间段内的水平位移自动监测装置主体所处土体的累计位移数据,并将所述累计位移数据通过所述服务器上传至所述中央处理器。
11.进一步地,所述水平位移自动监测装置主体在中段位置处均设置有力学传感器和mems姿态角度传感器,力学传感器用于测定水平位移自动监测装置土体就会受到基坑管道的滑移力,mems姿态角度传感器用于测定水平位移自动监测装置主体的倾斜角度。
12.相比于现有技术,本发明具有如下有益技术效果:通过对水平位移自动监测装置主体上的一截面单元的所受滑移力情况进行监测,由水平位移自动监测装置主体的挠曲微分方程计算,得到单位时间段内水平位移自动监测装置主体在水平和竖直方向的位移量,采用时间累积算法,分别对多个连续单位时间段内
的水平和竖直方向的位移量采用多项式进行拟合,获得连续单位时间段内土体的累积水平位移x和竖直位移y;采用质心位移算法,根据连续单位时间段内不同位置设置的水平位移自动监测装置上传的连续单位时间段内土体累积水平位移x和累积竖直位移y以及各个水平位移自动监测装置主体的倾斜情况拟合连续单位时间段内土体区域整体的水平位移曲线。
附图说明
13.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
14.附图1为本发明的水平位移自动监测系统结构示意图;附图2为本发明的水平位移自动监测装置的结构示意图;附图3为初始的多个水平位移自动监测装置的布设位置和各自发生水平位移和倾斜后的位置变化情况示意图;附图4为中央处理器计算的连续时间段内的土体累积位移情况示意图;附图5为本发明的为水平位移自动监测装置主体受滑移力示意图。
具体实施方式
15.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
16.在本发明的具体实施例附图中,为了更好、更清楚的描述系统中的各元件的工作原理,表现所述装置中各部分的连接关系,只是明显区分了各元件之间的相对位置关系,并不能构成对元件或结构内的信号传输方向、连接顺序及各部分结构大小、尺寸、形状的限定。
17.如图1所示,为本发明的水平位移自动监测系统的结构示意图,水平位移自动监测系统包括:多个水平位移自动监测装置、中央处理器和接收仪表。
18.多个水平位移自动监测装置分别位于待监测土体区域的基坑管道内的不同位置处,用于监测各自位置处的土体在连续时间段内的累计位移数据;中央处理器用于接收多个水平位移自动监测装置监测的各自位置处的土体在连续时间段内的累计位移数据,采用质心位移算法计算连续时间段内土体区域整体的水平位移情况,并发送至所述接收仪表。
19.如图2所示,为本发明的水平位移自动监测装置的结构示意图,水平位移自动监测装置包括:水平位移自动监测装置主体101、起重电机102、分析处理器103和服务器104。
20.使用时,需要先将水平位移自动监测装置主体101安装到指定的待监测土体区域,通过起重电机102将水平位移自动监测装置主体101缓慢下至基坑管道100的内部,每个水平位移自动监测装置主体101将多个连续单位时间段的多个监测数据存储在分析处理器103中;分析处理器103对多个监测数据进行分析,获得多个连续单位时间段内水平位移自
动监测装置主体所处土体的累积位移数据。
21.将多个水平位移自动监测装置主体101依次放入基坑管道100内,主体彼此之间具有固定间距,每个水平位移自动监测装置的分析处理器103将分析后的土体的累积位移数据上传到各自的服务器,并由服务器上传至中央处理器,计算连续时间段内土体区域整体的水平位移情况,并发送至所述接收仪表。
22.具体地,分析处理器采用时间累积算法对监测数据进行分析。时间累积算法是对监测数据进行统计分析和处理,进而确定和研究事物随时间的变化的方法。
23.每个水平位移自动监测装置主体在中段位置处均设置有力学传感器和mems姿态角度传感器,力学传感器用于测定水平位移自动监测装置土体就会受到基坑管道的滑移力,mems姿态角度传感器用于测定水平位移自动监测装置主体的倾斜角度。水平位移自动监测装置土体嵌入在基坑管道中,土体产生位移后,基坑管道会随着土体的位移而产生变形,水平位移自动监测装置土体就会受到基坑管道的滑移力,因此能够很好地把土体位移的变化在时间上的累积转换成了空间上的分布,只需要分时对位于不同位置的多个水平位移自动监测装置土体进行的姿态测量和滑移力监测数据获取,就可以计算得到多个连续单位时间段内水平位移自动监测装置主体所处土体的累积位移数据。
24.如图5所示,为水平位移自动监测装置主体受滑移力示意图。在水平位移自动监测装置主体上设置有力学传感器和mems姿态角度传感器,水平位移自动监测装置主体上所受滑移力为f,滑移力f的水平方向分量为fx,竖直方向分量为fy,考虑到实际情况,将基坑管道由温度引起的应力变化忽略。
25.水平位移自动监测装置主体形变方程为:;;式中,m为水平位移自动监测装置主体的弯矩;弯矩m的水平方向分量为mx,竖直方向分量为my,e为水平位移自动监测装置主体的弹性模量;i为水平位移自动监测装置主体的惯性矩,则水平位移自动监测装置主体的抗弯刚度为,而水平位移自动监测装置主体的弹性模量e和惯性矩i均已知,属于水平位移自动监测装置的自身属性参数,x和y分别为单位时间段内水平位移自动监测装置主体在水平和竖直方向的位移量,为水平位移自动监测装置主体与竖直方向的倾角,c为常数。
26.由水平位移自动监测装置主体的受力平衡条件可知:;;fx、fy为由水平位移自动监测装置主体受到的滑移力f的水平分量和竖直分量。
27.通过上述计算,即可得出单位时间段内水平位移自动监测装置主体在水平方向和竖直方向上的位移量x和y。
28.设不同单位时间段i内的水平位移自动监测装置主体在水平方向的位移量数据为xi,i=1,2,
……
n,用x表示多个连续单位时间段内该水平位移自动监测装置主体所处的土体的累积水平位移。
29.对这组数据xi采用多项式进行拟合,得到x,设拟合方程为:
ꢀꢀꢀꢀ
;式中:n为连续单位时间段的个数,将其作为拟合方程的幂指数;n越大,拟合的精度就越高。
30.一般n≥3即能满足工程要求,本优选实施例中,取n=3,则i=1,2,3;a0,a1,a2,a3为待定系数。
31.则拟合方程为:
ꢀꢀꢀ
(1);设3个累积时间段的水平位移自动监测装置主体所处的土体的累积水平位移为x1,x2,x3,则拟合矩阵为:
ꢀꢀꢀ
(2):用x’代替式(2)中,用a代替式(2)中,用b代替式(2)中,则式(2)可写成:x’=ba
ꢀꢀꢀ
(3);在式(3)两端同时乘上b
t
,b
t
是b的转置矩阵,则式(3)可写成:b
t
x’=b
t
ba
ꢀꢀꢀ
(4);用c来代替b
t
b,则c是4
×
4的矩阵,求出c的逆矩阵c-1
,把c-1
分别乘式(4)两边,则有:c-1bt
x’=c-1
ca
ꢀꢀꢀꢀ
(5);于是式(2)中a的待定系数a0,a1,a2,a3可以全部求出,代入式(1),即可计算3个连续单位时间段的土体的累积水平位移x。
32.同理,采用上述步骤可以计算3个连续单位时间段的土体的累积竖直位移y。
33.多个水平位移自动监测装置的服务器将各自分析处理器计算所得的数据,即土体的累积水平位移x和累积竖直位移y发送至中央处理器,中央处理器根据该数据计算3个连续单位时间段内待监测土体区域整体的累积水平位移曲线,并发送至接收仪表。
34.具体地,中央处理器采用质心位移算法计算3个连续单位时间段内待监测土体区域整体的水平位移情况,如图3所示,为初始的多个水平位移自动监测装置的布设位置和各自发生位移和倾斜后的位置变化情况示意图。图3中以布设两个水平位移自动监测装置为例进行说明。
35.设每个水平位移自动监测装置主体的长度为l,间距为d,两个水平位移自动监测装置主体的初始质心分别用q0和p0表示,坐标系及坐标原点o的设置如图3所示,则初始质心q0的坐标设为,初始质心p0的坐标设为。
36.两个水平位移自动监测装置主体在连续单位时间段内发生位移后,质心分别用q
和p表示;质心q相比于质心q0累积水平位移为x2,累积水平位移为y2;质心p相比于质心p0累积水平位移为x1,累积竖直位移为y1;则质心q的坐标设为,质心p的坐标设为。累积水平位移和累积水平位移由分析处理器计算所得。
37.两个水平位移自动监测装置主体在发生位移的同时也发生了倾斜,每个水平位移自动监测装置主体内部均设置有mems姿态角度传感器,用于测定水平位移自动监测装置的倾斜角度,设质心为q的水平位移自动监测装置主体的倾角为,设质心为p的水平位移自动监测装置主体的倾角为。
38.如图4所示的中央处理器计算的连续时间段内的土体累积位移情况,中央处理器根据水平位移自动监测装置主体的倾角和、水平位移自动监测装置主体的质心q和质心p的坐标位置以及水平位移自动监测装置主体的长度绘制3个连续单位时间段内的待监测土体区域的累积水平位移曲线。在上述实施例中,可以全部或部分地通过软件、硬件、固件或者其任意组合来实现。当使用软件实现时,可以全部或部分地以计算机程序产品的形式实现。所述计算机程序产品包括一个或多个计算机指令。在计算机上加载和执行所述计算机程序指令时,全部或部分地产生按照本技术实施例所述的流程或功能。所述计算机可以是通用计算机、专用计算机、计算机网络、或者其他可编程装置。所述计算机指令可以存储在计算机可读存储介质中,或者通过所述计算机可读存储介质进行传输。所述计算机可读存储介质可以是计算机能够存取的任何可用介质或者是包含一个或多个可用介质集成的服务器、数据中心等数据存储设备。所述可用介质可以是磁性介质,(例如,软盘、硬盘、磁带)、光介质(例如,dvd)、或者半导体介质(例如,固态硬盘(solid state disk,ssd))等。
39.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1