基于滑窗多波束盲源分离的雷达抗干扰方法及系统与流程
1.本发明涉及雷达信号处理技术领域,具体涉及基于滑窗多波束盲源分离的雷达抗干扰方法及系统。
背景技术:
2.随着雷达应用中电磁环境复杂性的不断提高,雷达抗干扰能力的需求越来越迫切。能否适应复杂的干扰环境成为雷达系统成败的关键。为了提高雷达在复杂电磁干扰环境中的性能,已经广泛采用了频率捷变、超低副瓣、副瓣匿影、自适应副瓣对消、自适应波束形成、盲源分离等抗干扰措施。自适应副瓣对消和自适应波束形成通过干扰和目标回波在空间响应上的差异,通过干扰协方差统计矩阵在干扰方向形成方向图的零陷,实现干扰的抑制。但当干扰位于主瓣波束宽度内时,目标方向矢量与干扰特征矢量部分相关,造成目标方向的波束无法有效形成,同时引入主瓣方向图的偏移。对于主瓣进入的干扰,学者们提出了基于盲源分离理论的抗干扰方法,其利用干扰和目标回波统计独立的特性,通过对系统响应矩阵的估计,实现目标回波的分离提取。其中基于四阶累积量的特征矩阵近似联合对角化(jade)算法性能相对稳定,适用于弱目标强干扰环境。
3.例如公布号为cn109270499a的现有发明申请文献《一种基于特征矩阵联合对角化的多目标主瓣抗干扰方法》该方法首先在多目标受主瓣干扰的情况下建模;然后利用jade将干扰分量与目标回波分量分离开来;最后根据匹配滤波原则,将盲源分离得到的目标回波分量经过匹配滤波器,最终抑制干扰进而实现目标探测。由该现有技术的具体实施内容可知,该现有方案涉及多目标盲源分离抗主瓣干扰方法。然而,复杂电磁干扰环境下的雷达目标检测不仅包含干扰的抑制,还需要对干扰抑制后的信号进行检测和参数的估计。特别是当干扰位于主瓣内时,干扰的抑制往往带来主瓣流型的畸变,导致干扰抑制后无法通过幅度包络的拟合实现测角。另外,在目标被测量到角度之前,无法得知干扰是主瓣干扰还是副瓣干扰,进而选择合适的方法架构。因此,需要研究既能抗干扰又能进行目标测角的方法。
4.又例如公布号为cn114114163a的现有发明专利申请文献《一种基于盲源分离的阵列雷达抗欺骗式干扰方法》在盲源分离技术基础上,结合接收信号的波达角度信息,即通过盲源分离恢复激励阵列天线的多源信号波形能够有效实现干扰和目标的分离,再利用干扰辨识技术有效提取目标信号。从该现有技术中的具体实现内容可知,该现有技术利用阵列结构等先验数据,获得目标和干扰的波达角参数,以分离目标信号和干扰。同时,公布号为cn111044979a的现有发明申请文献《一种基于盲源分离的主瓣干扰对消与目标角度估计方法》包含步骤:1、接收信号和干扰数据;2、获取接收天线阵列的输出数据;3、对面阵输出进行加权得到和差波束数据;4、对另一天线重复步骤1和2,并对接收数据进行盲源分离;5、提取分离后干扰数据;6、利用提取的干扰数据对得到的和差波束数据分别进行干扰对消;7、用干扰对消后的和差波束数据进行和差波束测角得到目标的方位角和俯仰角,但该现有技术偏重应用于分布式雷达。基于滑窗子阵的盲源分离雷达抗干扰方法,具备实现干扰抑制
和测角的能力,但子阵架构要求系统的子阵间距具有滑动不变性,而现代雷达系统中为了降低微波系统的成本往往采用非等间距的天线布阵方法,难以保证滑窗子阵间距组合的一致。另外,子阵的合成时,合成的子阵数越少越能带来运算量的降低,然而却对应着子阵的波束变窄,无法实现远区副瓣干扰的高性能抑制。
5.综上,现有技术存在抗干扰过程带来的测角误差、子阵间距无法满足滑动不变性时的抗干扰问题,以及子阵降维带来的副瓣干扰抑制性能下降的技术问题。
技术实现要素:
6.本发明所要解决的技术问题在于如何解决现有技术中抗干扰过程带来的测角误差、子阵间距无法满足滑动不变性时的抗干扰问题,以及子阵降维带来的副瓣干扰抑制性能下降的技术问题。
7.本发明是采用以下技术方案解决上述技术问题的:基于滑窗多波束盲源分离的雷达抗干扰方法包括:
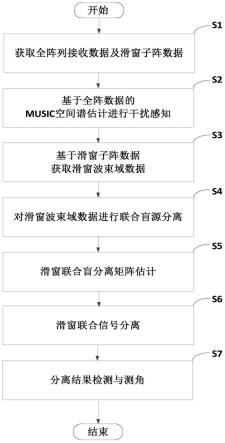
8.s1、获取全阵数据及滑窗子阵数据;
9.s2、根据全阵数据进行协方差估计,获取信号特征值及信号特征矢量,据以利用music算法进行空间谱估计,得到所有信号源的角度分布,据以感知信号干扰;
10.s3、为每个信号干扰的方向构建干扰波束合成导向矢量,利用干扰波束合成导向矢量对滑窗子阵数据进行干扰波束合成,为目标方向构建目标波束合成导向矢量,利用目标波束合成导向矢量,对滑窗子阵数据进行目标波束合成,以构建滑窗波束域数据;
11.s4、对滑窗波束域数据进行联合盲源分离,分别估计每次滑窗的信号,据以进行联合预处理,得到联合协方差矩阵,对联合协方差矩阵进行特征分解,构建白化矩阵,并进行白化预处理得到白化信号;
12.s5、根据所有白化信号构建联合累积量矩阵,据以获取并特征分解联合累积量矩阵,以得到联合累积量特征值以及累积量特征矢量,据以处理得到联合特征矩阵,对联合特征矩阵进行联合近似对角化处理,以得到滑窗联合盲分离矩阵;
13.s6、利用滑窗联合盲分离矩阵,对滑窗波束信号矢量进行信号分离,据以得到分离信号数据,据以得到目标信号及干扰信号;
14.s7、对分离出的信号数据路进行恒虚警cfar检测,并对目标所在的距离单元进行测角处理,并计算相控阵波程差,据以得到当前相位角对应的方向角。
15.本发明利用相控阵阵面的阵元数据感知干扰的角度,将全阵分为两个窗并根据干扰角度和雷达主工作角度分别进行波束合成,并对两个窗的波束域数据进行联合的盲源分离将干扰与目标信号分离,以完成对分离出的目标信号进行检测和目标测角,解决抗干扰过程带来的测角误差,在实现干扰抑制的同时获得高精度的目标测角,高效解决传统抗主瓣干扰方法无法测角的问题。
16.在更具体的技术方案中,步骤s1包括:
17.s11、根据源信号与系统模型,利用下述逻辑表示全阵接收单元数量为n的阵列的信号:
18.x=[x1,x2,x3,...,xn]
t
[0019][0020]
其中,m为天线接收到的所有信号源的数量,并满足:
[0021]
m《n,
[0022]
式中,a(θ)=[1,e
j2πdsinθ/λ
,...,e
j2π(n-1)dsinθ/λ
]
t
为方向导向矢量,a为方向矢量,e为自然常数,d为接收通道的间距,θi,i=1,...,m为信号相对天线法线的角度,λ为波长,第m个分量jm∈c1×
p
,1≤m≤m为信号源,利用下述逻辑将信号源表示为:
[0023]jm
=[1,exp(j2πfm/fs),...,exp(j2πfm(p-1)/fs)]
[0024]
其中,fs为雷达采样频率,fm为信号源的频率,全阵接收信号x为nxp的复数矩阵,其中,n为空间维数,p为快时间采样维数,γ为噪声;
[0025]
s12、将全阵信号矩阵,按照空间维进行滑窗,每个窗的阵元数为w,分为两组空间上分集的信号矩阵:
[0026][0027][0028]
本发明通过采用滑窗波束的系统架构,降低了抗干扰方法对滑窗子阵类方法的子阵间距滑动不变性的要求,本发明与现有技术相比,适用范围更广。本发明解决了现有技术中子阵间距无法满足滑动不变性时的抗干扰问题。
[0029]
在更具体的技术方案中,步骤s2包括:
[0030]
s21、利用下述逻辑对全阵数据进行协方差矩阵估计:rn×n=e{x*xh}
[0031]
其中,h表示共轭转置;
[0032]
s22、利用下述逻辑表示信号特征值和信号特征矢量:
[0033][0034]
其中,特征值λi为正实数,对应于信号的能量,vi对应i个信号源的系统特性;
[0035]
s23、将信号特征值按照下述逻辑降序排列:
[0036][0037]
其中,各信号特征值对应的信号特征矢量分别为:
[0038][0039]
s24、根据信号特征矢量构建信号子空间sj和噪声子空间sn:
[0040][0041][0042]
据以得到music算法的空间谱估计值:
[0043][0044]
s25、根据空间谱估计值处理得到所有信号源的角度分布:
[0045][0046]
式中,表示第i个估计到的角度值。
[0047]
本发明基于干扰感知的波束域方法通过引入干扰的感知信息,降低了非干扰方向可能引入的不确定量,进而集中系统的空间资源专注于抗干扰,能够获得更好的抗干扰性能。
[0048]
在更具体的技术方案中,步骤s3包括:
[0049]
s31、为每个信号干扰的方向:以下述逻辑构建干扰波束合成导向矢量:
[0050][0051]
s32、根据干扰波束合成导向矢量,以下述逻辑对滑窗子阵数据进行干扰波束合成,以得到干扰波束合成结果:
[0052][0053][0054]
s33、利用下述逻辑,为目标方向θ0构建目标波束合成导向矢量:
[0055][0056]
s34、根据下述逻辑,利用目标波束合成导向矢量,对滑窗子阵数据进行目标波束合成,以得到目标波束合成结果:
[0057][0058][0059]
s35、根据干扰波束合成结果与目标波束合成结果,根据下述逻辑构建滑窗波束域数据:
[0060]
和
[0061]
其中,t表示转置。
[0062]
本发明采用的滑窗波束域方法以干扰感知的结果形成波束达到降维的目的,避免子阵降维带来的副瓣干扰抑制性能下降的问题,使得降维更加的准确,同时波束可以指向各个干扰,进而避免子阵方法中远区副瓣干扰与子阵尺寸、子阵数的矛盾。
[0063]
在更具体的技术方案中,步骤s4包括:
[0064]
s41、滑窗联合白化预处理
[0065]
根据每次滑窗的信号,分别估计得到协方差矩阵:
[0066]
和
[0067]
其中,为第一个窗的第i列元素构成的矢量,为第二个窗的第i列元素构成的矢量;
[0068]
s42、根据协方差矩阵,利用下述逻辑构建联合协方差矩阵:
[0069][0070]
s43、对联合协方差矩阵r
zz
进行特征分解,并利用下述逻辑表示联合协方差矩阵:
[0071]rzz
=uλuh[0072]
其中,λ为对角阵,对角元素为特征值;
[0073]
s44、将特征值降序排列:λ1≥λ2≥...,≥λ
mj+1
,以特征值对应的特征矢量构成特征矩阵u,其中,将特征矩阵表示为u=[u1,u2,...,u
mj+1
];
[0074]
s45、构建白化矩阵并进行白化预处理,利用下述逻辑构建联合白化处理矩阵:
[0075][0076]
并利用下述逻辑对两个滑窗波束域数据分别进行白化处理,据以得到第一白化信号及第二白化信号
[0077]
在更具体的技术方案中,步骤s5包括:
[0078]
s51、利用下述逻辑表示第一滑窗信号矢量的四阶累积量:
[0079][0080]
并根据四阶累积量构建第一四阶累积量矩阵:
[0081][0082]
利用步骤s51中的前述逻辑对第二滑窗信号矢量构建第二四阶累积量矩阵
[0083]
s52、根据第一四阶累积量矩阵及第二四阶累积量矩阵,利用下述逻辑构建联合四阶累积量矩阵:
[0084][0085]
s53、对联合四阶累积量矩阵进行特征分解,并利用下述逻辑表示联合累积量特征值以及累积量特征矢量:
[0086][0087]
其中,λi为第i个特征值,vi为对应的特征矢量;
[0088]
s54、取前mj+1个联合累积量特征值及累积量特征矢量,利用下述逻辑构建特征矢量矩阵:
[0089][0090]
s55、将特征矢量矩阵中的(mj+1)2×
1维列矢量vi,按列排列为(mj+1)
×
(mj+1)的特征方阵gi,据以得到联合特征矩阵:
[0091][0092]
s56、对联合特征矩阵,进行基于联合近似对角化jade处理,求得滑窗联合盲分离矩阵:
[0093][0094]
其中,为矩阵di=q
hgi
q的k行l列元素。
[0095]
在更具体的技术方案中,步骤s53包括:
[0096]
s531、将联合累积量特征值按照模值降序排列:
[0097][0098]
s532、各联合累积量特征值对应的累积量特征矢量为:
[0099]
在更具体的技术方案中,步骤s6中,利用滑窗联合盲分离矩阵q,对联合白化处理的滑窗信号矢量和进行信号分离:据以分离目标信号及干扰信号。
[0100]
在更具体的技术方案中,步骤s7包括:
[0101]
s71、对信号分离结果:和的每一行进行恒虚警cfar检测;
[0102]
s72、利用下述逻辑对目标所在的距离单元,进行基于相位的测角处理:
[0103][0104]
其中,conj表示取共轭,∠表示取复数的相位角;
[0105]
s73、计算相控阵波程差,得到该相位角对应的方向角:
[0106][0107]
其中,λ为波长,bd为两次滑窗的相位中心间距。
[0108]
在更具体的技术方案中,系统包括:
[0109]
接收及滑窗数据模块,用以获取全阵数据及滑窗子阵数据;
[0110]
干扰感知模块,用以根据全阵数据进行协方差估计,获取信号特征值及信号特征
矢量,据以利用music算法进行空间谱估计,得到所有信号源的角度分布,据以感知信号干扰,干扰感知模块与接收及滑窗数据模块连接;
[0111]
滑窗波束域获取模块,用以为每个信号干扰的方向构建干扰波束合成导向矢量,利用干扰波束合成导向矢量对滑窗子阵数据进行干扰波束合成,为目标方向构建目标波束合成导向矢量,利用目标波束合成导向矢量,对滑窗子阵数据进行目标波束合成,以构建滑窗波束域数据,滑窗波束域获取模块与干扰感知模块连接;
[0112]
滑窗波束域数据联合盲源分离模块,用以分别估计每次滑窗的信号,据以进行联合预处理,得到联合协方差矩阵,对联合协方差矩阵进行特征分解,构建白化矩阵,并进行白化预处理得到白化信号,滑窗波束域数据联合盲源分离模块与接收及滑窗数据模块连接;
[0113]
滑窗联合盲分离矩阵估计模块,用以根据所有白化信号构建联合累积量矩阵,据以获取并特征分解联合累积量矩阵,以得到联合累积量特征值以及累积量特征矢量,据以处理得到联合特征矩阵,对联合特征矩阵进行联合近似对角化处理,以得到滑窗联合盲分离矩阵,滑窗联合盲分离矩阵估计模块与滑窗联合白化预处理模块连接;
[0114]
滑窗联合信号分离模块,用以利用滑窗联合盲分离矩阵,对滑窗波束信号矢量进行信号分离,据以得到分离信号数据,据以得到目标信号及干扰信号,滑窗联合信号分离模块与联合盲源分离模块连接;
[0115]
分离结果检测与测角模块,用以对分离出的信号路数据的每一行进行cfar检测,并对目标所在的距离单元进行测角处理,并计算相控阵波程差,据以得到当前相位角对应的方向角,分离结果检测与测角模块与滑窗联合盲分离矩阵估计模块连接。
[0116]
本发明相比现有技术具有以下优点:本发明利用相控阵阵面的阵元数据感知干扰的角度,将全阵分为两个窗并根据干扰角度和雷达主工作角度分别进行波束合成,并对两个窗的波束域数据进行联合的盲源分离将干扰与目标信号分离,以完成对分离出的目标信号进行检测和目标测角,解决了抗干扰过程带来的测角误差,在实现干扰抑制的同时获得高精度的目标测角,高效解决传统抗主瓣干扰方法无法测角的问题。
[0117]
本发明通过采用滑窗波束的系统架构,降低了抗干扰方法对滑窗子阵类方法的子阵间距滑动不变性的要求,本发明与现有技术相比,适用范围更广。本发明解决了现有技术中子阵间距无法满足滑动不变性时的抗干扰问题。
[0118]
本发明基于干扰感知的波束域方法通过引入干扰的感知信息,降低了非干扰方向可能引入的不确定量,进而集中系统的空间资源专注于抗干扰,能够获得更好的抗干扰性能。
[0119]
本发明采用的滑窗波束域方法以干扰感知的结果形成波束达到降维的目的,避免子阵降维带来的副瓣干扰抑制性能下降的问题,使得降维更加的准确,同时波束可以指向各个干扰,进而避免子阵方法中远区副瓣干扰与子阵尺寸、子阵数的矛盾。本发明解决了现有技术中存在的抗干扰过程带来的测角误差、子阵间距无法满足滑动不变性时的抗干扰问题,子阵降维带来的副瓣干扰抑制性能下降的技术问题。
附图说明
[0120]
图1为本发明实施例1的基于滑窗多波束盲源分离的雷达抗干扰方法流程图;
[0121]
图2为本发明实施例1的基于滑窗多波束盲源分离的雷达抗干扰方法数据流处理示意图;
[0122]
图3为本发明实施例1的仿真实施实例的空间结构图;
[0123]
图4为本发明实施例1的干扰感知的谱分布图;
[0124]
图5为本发明实施例1的多波束合成后的各滑窗波束的分布示意图;
[0125]
图6为本发明实施例1的两次滑窗得到的盲源分离结果示意图;
[0126]
图7为本发明实施例1的多次试验得到的目标的测角分布示意图。
具体实施方式
[0127]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0128]
实施例1
[0129]
如图1及图2所示,本发明提供的基于滑窗多波束盲源分离的雷达抗干扰方法包括以下基本步骤:
[0130]
s1、获取全阵数据及滑窗子阵数据;
[0131]
在本实施例中,对于全阵接收单元数量为n的阵列,信号表示为:x=[x1,x2,x3,...,xn]
t
其由源信号与系统模型共同决定,并将其表示为:
[0132][0133]
其中,m为天线接收到的所有信号源的数量,并满足m
《
n,
[0134]
a(θ)=[1,e
j2πdsinθ/λ
,...,e
j2π(n-1)dsinθ/λ
]
t
[0135]
如图3所示,为方向导向矢量,d为接收通道的间距,θi,i=1,...,m为信号相对天线法线的角度,λ为波长,jm∈c1×
p
,1≤m≤m为信号源,在本实施例中,信号源包括:干扰产生器或者目标,其可表示为:
[0136]jm
=[1,exp(j2πfm/fs),...,exp(j2πfm(p-1)/fs)]
[0137]
其中,fs为雷达采样频率,fm为信号源的频率。那么,全阵接收信号x为nxp的复数矩阵,其中n为空间维数,p为快时间采样维数,γ为噪声。在本实施例中n为16,p为200,m为4,d为半波长;
[0138]
在本实施例中,将全阵信号矩阵,按照空间维进行滑窗,分为两组空间上分集的信号矩阵:
[0139][0140][0141]
在本实施例中,w的值可采用例如15。
[0142]
s2、基于全阵数据的music空间谱估计进行干扰感知;
[0143]
在本实施例中,由于滑窗降低了有效的阵面尺寸,因此干扰感知采用全阵信号进
行,具体包括:对全阵接收信号进行协方差矩阵估计:
[0144]rn
×n=e{x*xh}
[0145]
其中,h表示共轭转置。
[0146]
对其进行特征分解并表示为特征值和特征矢量的形式:
[0147][0148]
式中,其特征值λi为正实数,对应于信号的能量,vi对应着i个信号源的特性。
[0149]
将特征值按照从大到小的顺序进行排列各自对应的特征矢量分别为:构建信号子空间sj和噪声子空间sn:
[0150][0151][0152]
得到music算法的空间谱估计:
[0153][0154]
在本实施例中,通过空间谱估计可以得到所有信号源的角度分布
[0155]
如图4所示,在本实施例中,mj=3,各个角度值可采用例如:-10.77,2.21和28.62。
[0156]
s3、基于滑窗子阵数据获取滑窗波束域数据;
[0157]
在本实施例中,首先根据步骤s2得到的干扰角度值,进行滑窗空间的干扰波束合成,得到每个干扰方向(i=1,2,..,mj,在本实施例中的三个方向分别为-10.77,2.21和28.62)构建波束合成的导向矢量:
[0158][0159]
并利用其对滑窗数据进行波束合成:
[0160][0161][0162]
进行目标波束合成,在本实施例中,为目标方向θ0构建波束合成的导向矢量:
[0163][0164]
并利用其对滑窗数据进行波束合成,在本实施例中目标方向θ0可设为例如0。
[0165][0166][0167]
从而构建滑窗波束域数据:
[0168]
和
[0169]
其中,t表示转置。
[0170]
如图5所示,在本实施例中,每次滑窗构建3个指向干扰的波束和1个指向可能目标的波束,共4个波束,双滑窗则对应8个波束。
[0171]
s4、对滑窗波束域数据进行联合盲源分离;
[0172]
在本实施例中,进行滑窗联合白化预处理:
[0173]
每次滑窗的信号分别估计得到协方差矩阵:
[0174]
和
[0175]
其中,为第一个窗的第i列元素构成的矢量,为第二个窗的第i列元素构成的矢量。
[0176]
构建联合的协方差矩阵
[0177]
在本实施例中,对r
zz
进行特征分解,表示为r
zz
=uλuh的形式,其中λ为对角阵,对角元素为特征值,从大到小排列λ1≥λ2≥...,≥λ
mj+1
,对应的特征矢量构成特征矩阵u,并表示为:
[0178]
u=[u1,u2,...,u
mj+1
]。
[0179]
在本实施例中,构建白化矩阵并进行白化预处理,联合白化处理矩阵构建为并对两个滑窗的波束域数据分别进行白化处理:
[0180][0181][0182]
s5、滑窗联合盲分离矩阵估计;
[0183]
在本实施例中,白化后信号的四阶累积量表示为:
[0184][0185]
构建四阶累积量矩阵:
[0186][0187]
利用前述操作对白化后信号构建四阶累积量矩阵
[0188]
在本实施例中,构建联合四阶累积量矩阵:
[0189]
[0190]
对联合四阶累积量矩阵进行特征分解,并表示为特征值和特征矢量的形式:
[0191][0192]
其中,λi为第i个特征值,vi为对应的特征矢量。将特征值按照模值从大到小的顺序进行排列各自对应的特征矢量分别为:
[0193][0194]
在本实施例中,取前mj+1个特征值及特征矢量构建矩阵:
[0195][0196]
在本实施例中,将其中的(mj+1)2×
1维列矢量vi,按列排列为(mj+1)
×
(mj+1)的特征方阵gi,则得到联合特征矩阵:
[0197][0198]
在本实施例中,对联合特征矩阵,进行基于联合近似对角化处理(jade),即可求得分离矩阵:
[0199][0200]
其中,为矩阵di=q
hgi
q的k行l列元素。
[0201]
s6、滑窗联合信号分离;
[0202]
如图5所示,在本实施例中,利用分离矩阵q对联合白化处理的滑窗信号矢量和进行信号分离:
[0203][0204]
进而分离目标信号和干扰信号。
[0205]
如图6所示,本实施例的分离结果中,每次滑窗分离出四路信号,第4路包含了目标的信号。
[0206]
s7、分离结果检测与测角。
[0207]
如图7所示,在本实施例中,进行100次实验的测角分布,对和的每一行进行cfar检测,对于目标所在行h的距离单元j,进行基于相位的测角处理:其中conj表示取共轭,∠表示取复数的相位角。根据相控阵波程差的计算,可得到该相位角对应的方向角为:其中λ为波长,bd为两次滑窗的相位中心间距。本实施例中目标信号为和bd为半波长。
[0208]
综上,本发明利用相控阵阵面的阵元数据感知干扰的角度,将全阵分为两个窗并根据干扰角度和雷达主工作角度分别进行波束合成,并对两个窗的波束域数据进行联合的盲源分离将干扰与目标信号分离,以完成对分离出的目标信号进行检测和目标测角,解决了抗干扰过程带来的测角误差,在实现干扰抑制的同时获得高精度的目标测角,高效解决
传统抗主瓣干扰方法无法测角的问题。
[0209]
本发明通过采用滑窗波束的系统架构,降低了抗干扰方法对滑窗子阵类方法的子阵间距滑动不变性的要求,本发明与现有技术相比,适用范围更广。本发明解决了现有技术中子阵间距无法满足滑动不变性时的抗干扰问题。
[0210]
本发明基于干扰感知的波束域方法通过引入干扰的感知信息,降低了非干扰方向可能引入的不确定量,进而集中系统的空间资源专注于抗干扰,能够获得更好的抗干扰性能。
[0211]
本发明采用的滑窗波束域方法以干扰感知的结果形成波束达到降维的目的,避免子阵降维带来的副瓣干扰抑制性能下降的问题,使得降维更加的准确,同时波束可以指向各个干扰,进而避免子阵方法中远区副瓣干扰与子阵尺寸、子阵数的矛盾。本发明解决了现有技术中存在的抗干扰过程带来的测角误差、子阵间距无法满足滑动不变性时的抗干扰问题,子阵降维带来的副瓣干扰抑制性能下降的技术问题。
[0212]
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1