一种路侧激光雷达部署位置评估系统及方法
1.本发明属于传感器部署技术领域,涉及一种路侧激光雷达部署位置评估系统及方法。
背景技术:
2.近年来,激光雷达以其高分辨率以及对物体3d信息的获取能力,被广泛应用于交通领域,安装在路端的激光传感器,凭借其“上帝视角”的架设位置可以为智能交通系统及自动驾驶车辆提供全域的交通流信息,从而突破自车感知距离受限的瓶颈。目前大多数路侧传感应用如车辆跟踪、交通监控、定位等,对于激光雷达的感知方法研究大都集中在基于点云数据的算法性能提升上。但许多研究表明,基于点云的感知性能不仅受到算法影响,也受原始点云数据质量的影响。而点云的质量又会直接受lidar安装位置的影响。然而,确定路侧的最佳lidar安装位置仍然是一个难题。由于激光雷达成本高昂,在实际部署过程中,对不同位置、不同类型的激光雷达进行逐一测试,需要完成激光雷达部署、数据采集、模型训练、结果评估等工作,成本极高,且会消耗大量资源。因此,如何在短时间内以低成本完成激光雷达配置的定量评估是一个亟待解决的问题。
技术实现要素:
3.本发明的目的在于提供一种路侧激光雷达部署位置评估系统及方法,以克服现有激光雷安装依靠人工经验而导致的成本高,布置不合理的问题,本发明能够对激光雷达进行快速有效路侧部署指导。
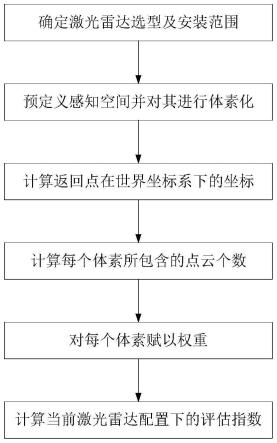
4.一种路侧激光雷达部署位置评估方法,包括以下步骤:
5.s1,确定激光雷达的选型及安装范围;
6.s2,根据激光雷达的选型确定激光雷达探测极限值,基于安装范围以及激光雷达探测极限值设定感知空间,然后对设定的感知空间进行体素化;
7.s3,利用选型后的激光雷达扫描获取激光雷360
°
范围内的点云数据,建立笛卡尔坐标系,将点云数据转换到笛卡尔坐标下,再通过选型后的激光雷达安装的外参信息计算点云数据在世界坐标系下的位置;
8.s4,计算步骤s2设定的感知空间内所有体素所获取的3d点云个数;
9.s5,对感知空间内每个体素赋以权重;
10.s6,根据步骤s4计算的所有体素所获取的3d点云个数以及每个体素赋的权重,利用条件熵计算当前激光雷达配置的评估指数。
11.优选的,所述激光雷达选型包括激光雷达的具体型号,所述的安装范围包括相对于世界坐标系而言激光雷达的平移矩阵及旋转角矩阵的范围信息。
12.优选的,步骤s2中,感知空间定义为长方体,定义内容包括长方体的长l,宽w,高h;切分的分辨率为γ,感知空间内的体素分割表示为:
[0013][0014]
n表示感知空间内的体素数量总和。
[0015]
优选的,步骤s3中,计算点云数据在世界坐标系下的位置:
[0016]
(3-1)构建所述笛卡尔坐标系oxyz:在多线激光雷达位于水平面上处于静止状态时,以所述激光雷达为中心点,以激光雷达的垂直轴线方向为z轴,以平行于道路的射线方向为x轴,y轴是由z轴和x轴根据右手螺旋定则确定;
[0017]
(3-2)计算点云数据在笛卡尔坐标系下的坐标:
[0018][0019]
所述[x
l
,y
l
,z
l
]为点云数据在笛卡尔坐标系的坐标值,将激光束接触到目标物体的点称为返回点,r代表返回点到激光雷达原点的直线距离,以探测点与激光雷达连线为基准,θ代表该连线与z轴之间的夹角,代表连线与x轴之间的夹角。
[0020]
优选的,根据激光雷达的安装外参进行点云数据的坐标转换,得到世界坐标系下的数据位置,其计算公式如下:
[0021][0022]
所述[xw,yw,zw]为点云数据在世界坐标系下的坐标值,r与t分别代表激光雷达相对于世界坐标系原点的旋转与平移矩阵。
[0023]
优选的,步骤s4中,计算每个体素内的点云个数:
[0024]
(4-1)根据公式(2)确定每条线束在感兴趣区域内所能产生的所有点,其中r以s2中所确定的分辨率γ为步长进行递增,水平偏转角度由激光雷达水平分辨率决定;
[0025]
(4-2)计算出点云数据的笛卡尔坐标后,根据公式(3)进行坐标系转换,将其转换至世界坐标系下,每个返回点被表述为其中,(x,y,z)表示其在世界坐标系下的坐标,所有的返回点坐标集合被表征为p={p
1,
p
2,
…
,p
t
},t表示感兴趣区域内所有返回点的个数总和;
[0026]
(4-3)根据每个体素的位置,判断其所包括的点云个数,对每个体素而言,其计算公式如下:
[0027][0028]
其中,表示指示函数,用以指代该返回点是否位于某一体素内,联合公式(2)(3)(4)可以得到每个体素内所对应的点云个数。
[0029]
优选的,每个体素的权重计算公式如下:
[0030][0031]
所述w(vi)代表每个体素的权重,可针对不同的道路结构类型及关注需求自行指
定,代表所有体素的权重和。
[0032]
优选的,引入条件熵的概念用于评估当前激光雷达配置,对每个体素而言,使用下述公式计算其条件熵:
[0033]
优选的,对当前配置下的激光雷达评估指数,得到的h值越高,代表当前激光雷达配置越优,采用公式(7)进行计算:
[0034][0035]
其中表示体素内的点云分布,n表示所有体素个数之和。
[0036]
一种基路侧激光雷达部署位置评估系统,参数输入模块,预处理模块及评估模块;
[0037]
参数输入模块用于输入激光雷达的选型及安装范围;
[0038]
预处理模块用于根据激光雷达的选型确定激光雷达探测极限值,基于安装范围以及激光雷达探测极限值设定感知空间,对设定的感知空间进行体素化;利用选型后的激光雷达扫描获取激光雷360
°
范围内的点云数据,建立笛卡尔坐标系,将点云数据转换到笛卡尔坐标下,再通过选型后的激光雷达安装的外参信息计算点云数据在世界坐标系下的位置;计算设定的感知空间内所有体素所获取的3d点云个数;对感知空间内每个体素赋以权重;
[0039]
评估模块根据计算的所有体素所获取的3d点云个数以及每个体素赋的权重,利用条件熵计算当前激光雷达配置的评估指数输出。
[0040]
与现有技术相比,本发明具有以下有益的技术效果:
[0041]
本发明一种路侧激光雷达部署位置评估方法,根据激光雷达的选型确定激光雷达探测极限值,基于安装范围以及激光雷达探测极限值设定感知空间,然后对设定的感知空间进行体素化;利用选型后的激光雷达扫描获取激光雷360
°
范围内的点云数据,建立笛卡尔坐标系,将点云数据转换到笛卡尔坐标下,再通过选型后的激光雷达安装的外参信息计算点云数据在世界坐标系下的位置,能够将复杂的激光雷达安装位置问题转化为参数计算问题,能够实现对激光雷达安装位置、角度的评估及最优架设位置的选择,使用了基于每体素点云的度量标准来衡量激光雷达在预定义感知空间中感知到的信息量,通过本发明中的方法可以简化原有激光雷达架设位置评估流程,即传感器架设-数据收集-模型训练-位置评估,节省了激光雷达位置评估的耗时,适用于多种道路结构,提高了灵活性,最终得到准确的激光雷达架设位置评估指数。
附图说明
[0042]
图1为本发明实施例中激光雷达配置评估总体框架图;
[0043]
图2为本发明实施例中的激光雷达球坐标系示意图;
[0044]
图3为本发明实施例中不同roll角度及高度下对部署位置进行评估对比结果图。
具体实施方式
[0045]
为了使本技术领域的人员更好地理解本发明方案,下面将结合本发明实施例中的
附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
[0046]
本发明一种路侧激光雷达部署位置评估方法,包括以下步骤:
[0047]
s1,确定激光雷达的选型及安装范围;所述激光雷达选型包括激光雷达的具体型号;所述的安装范围包括相对于世界坐标系而言激光雷达的平移矩阵[x,y,z]及旋转角矩阵[roll,pitch,yaw]的范围信息,所述世界坐标系的原点可自行定义,具体为激光雷达所依赖的路侧设施与地面的交汇点;
[0048]
s2,根据激光雷达的选型确定激光雷达探测极限值,基于安装范围以及激光雷达探测极限值设定感知空间,然后对设定的感知空间进行体素化;
[0049]
s3,利用选型后的激光雷达扫描获取激光雷360
°
范围内的点云数据,建立笛卡尔坐标系oxyz,将点云数据转换到笛卡尔坐标下,再通过选型后的激光雷达安装的外参信息计算点云数据在世界坐标系下的位置;
[0050]
s4,计算步骤s2设定的感知空间内所有体素所获取的3d点云个数;
[0051]
s5,对感知空间内每个体素赋以权重,以代表在激光雷达架设位置评估过程中不同体素的重要程度;
[0052]
s6,根据步骤s4计算的所有体素所获取的3d点云个数以及每个体素赋的权重,利用条件熵计算当前激光雷达配置的评估指数,根据评估指数进行雷达的配置安装,评估指数越高,对应的配置安装位置越合适,本发明能够在短时间内实现激光雷达配置,简单快捷,结论准确。
[0053]
步骤s2中,感知空间定义为长方体,定义内容包括长方体的长l,宽w,高h。切分的分辨率为γ,因此,感知空间内的体素分割表示为:
[0054][0055]
n表示感知空间内的体素数量总和。
[0056]
步骤s3中,计算点云数据在世界坐标系下的位置具体过程包括:
[0057]
(3-1)构建所述笛卡尔坐标系oxyz:在多线激光雷达位于水平面上处于静止状态时,以所述激光雷达为中心点,以激光雷达的垂直轴线方向为z轴,以平行于道路的射线方向为x轴,y轴是由z轴和x轴根据右手螺旋定则确定;
[0058]
(3-2)计算点云数据在笛卡尔坐标系下的坐标:
[0059][0060]
所述[x
l
,y
l
,z
l
]为点云数据在笛卡尔坐标系的坐标值,将激光束接触到目标物体的点称为返回点,r代表返回点到激光雷达原点的直线距离,以探测点与激光雷达连线为基准,θ代表该连线与z轴之间的夹角,代表连线与x轴之间的夹角。
[0061]
(3-3)根据激光雷达的安装外参进行点云数据的坐标转换,得到世界坐标系下的
数据位置,其计算公式如下:
[0062][0063]
所述[xw,yw,zw]为点云数据在世界坐标系下的坐标值,r与t分别代表激光雷达相对于世界坐标系原点的旋转与平移矩阵。
[0064]
步骤s4中,计算每个体素内的点云个数的具体步骤如下:
[0065]
(4-1)根据公式(2)确定每条线束在感兴趣区域内所能产生的所有点,其中r以s2中所确定的分辨率γ为步长进行递增,水平偏转角度由激光雷达水平分辨率决定;
[0066]
(4-2)计算出点云数据的笛卡尔坐标后,根据公式(3)进行坐标系转换,将其转换至世界坐标系下,每个返回点被表述为其中,(x,y,z)表示其在世界坐标系下的坐标,所有的返回点坐标集合可被表征为p={p
1,
p
2,
…
,p
t
},t表示感兴趣区域内所有返回点的个数总和;
[0067]
(4-3)根据每个体素的位置,判断其所包括的点云个数,对每个体素而言,其计算公式如下:
[0068][0069]
其中,表示指示函数,用以指代该返回点是否位于某一体素内。联合公式(2)(3)(4)可以得到每个体素内所对应的点云个数。
[0070]
步骤s5中,每个体素的权重计算公式如下:
[0071][0072]
所述w(vi)代表每个体素的权重,可针对不同的道路结构类型及关注需求自行指定,代表所有体素的权重和。
[0073]
步骤s6中,计算当前激光雷达配置的评估指数的步骤如下:
[0074]
(6-1)引入条件熵的概念用于评估当前激光雷达配置,对每个体素而言,使用下述公式计算其条件熵:
[0075][0076]
(6-2)对当前配置下的激光雷达评估指数,采用公式(7)进行计算:
[0077][0078]
其中表示体素内的点云分布,n表示所有体素个数之和。最终计算得到的h值越高,代表当前激光雷达配置越优。
[0079]
本发明一种路侧激光雷达架设评估方法,适用于多种类型的激光雷达;本技术以型号为pandar64的激光雷为例,对本方法进行分析。该pandar64的激光雷由64个激光发射单元组成一列,其垂直视场角为-25
°
~15
°
,线束间在垂直方向呈非均匀分布,水平角分辨
率为0.2
°
,以每秒10hz的频率进行水平旋转。可以提供以激光雷达为原点周围360
°
视场角100m范围内的环境信息。指定雷达旋转一周采集的数据作为一帧,雷达输出的数据是以球体坐标的方式表示,该球体坐标以雷达为中心,每个雷达有5个参数:垂直发射角θ、水平发射角点到雷达中心的距离r、反射强度intensity、gps时间帧信息。
[0080]
如图一所示,本示例路侧激光雷达部署位置评估方法具体过程:
[0081]
s1,确定激光雷达选型:
[0082]
具体的,确定激光雷达选型,包括激光雷达的生产厂商及具体型号,如本发明实例实施过程中所采用的为pandar64激光雷。不同型号的激光雷达对应不同的视场角、分辨率及线束数量。安装允许范围指的是激光雷达相对于世界坐标系原点的外参安装范围,包括平移距离及旋转角的限制范围。
[0083]
s2,根据激光雷达的选型确定激光雷达探测极限值,预定义感知空间并对其进行体素化,
[0084]
具体的,在本发明的实例实施过程中,道路结构为直道,感知空间定义如下:l∈[-80m,80m],w∈[0,28m],h∈[0,3m]。其中,l指的是感知空间的长,w是感知空间的宽,h指的是感知空间的高。对定义的感知空间进行体素化,切分的分辨率为0.1m,因此,感兴趣区域内的体素分割可以表示为:
[0085][0086]
其中,n表示感知空间内的体素数量总和,拆分后的每个体素在感知空间内表示为,si=[s
x
,sy,sz],其中,i指的是体素的编号,[x,y,z]是体素在世界坐标系下的坐标。
[0087]
s3,以激光雷达为中心建立笛卡尔坐标系并计算返回点坐标,具体包括以下步骤,
[0088]
s3.1,计算返回点在笛卡尔坐标系下的坐标。激光雷达依靠发射超短激光脉冲,投射到物体上发生漫反射,再接收返回光束,通过测量激光束在空中的飞行时间,可计算目标物体到传感器之间的距离。因此,将激光束接触到目标物体的点称为返回点。
[0089]
图2为以激光雷达为原点的球坐标系示意图,在不同roll角度及高度下对部署位置进行评估,评估结果如图3所示。在球坐标系中,返回点由距离和两个角度定义,距离指的是返回点距离激光雷达原点的距离,两个角度分别指的是方位角与极角,分别对应图2中的θ与每个返回点从球坐标导出笛卡尔坐标的计算公式如下:
[0090][0091]
其中,[x
l
,y
l
,z
l
]为点云数据在笛卡尔坐标系的坐标值。
[0092]
s3.2,确定激光雷达外参矩阵:步骤s1中确定激光雷达配置时,输入的为旋转角信息,因此,需要完成旋转角信息到旋转角矩阵的变换,计算公式如下,
[0093][0094]
roll代表激光雷达绕x轴旋转的角度,pitch代表激光雷达绕y轴旋转的角度,yaw代表激光雷达绕z轴旋转的角度。
[0095]
其平移矩阵为:
[0096][0097]
s3.3,确定返回点在世界坐标系下的位置转换公式。根据给定平移矩阵及旋转矩阵信息进行点云数据的坐标转换,得到世界坐标系下的数据位置,其计算公式如下:
[0098][0099]
所述[xw,yw,zw]为点云数据在世界坐标系下的坐标值,r与t分布代表激光雷达相对于世界坐标系原点的旋转与平移矩阵。
[0100]
s3.4,计算所有返回点坐标。如公式(9)所示,分别更改r,θ,可计算出所有返回点的坐标。在计算过程中,令r保持不变,θ,分别按照激光雷达的垂直及水平分辨率进行更改,即可算出每根线束在不同水平角下同一r值下的返回点坐标。最后,对计算出来的世界坐标系的坐标值进行归一化处理。计算得到的返回点坐标保存在二维数组point[i][j]中,point[i]表示所有返回点的个数,point[i][j]则表示每个返回点所对应的世界坐标系下的坐标。
[0101]
s4,计算感知空间内每个体素内所包含的点云个数,具体包括以下步骤,
[0102]
s4.1,初始化当前点坐标,即令其等于激光雷达当前安装位置相对于世界坐标系原点的平移值,
[0103][0104]
s4.2,判断currentz是否小于预定义感知空间的最高值,若是,则跳转到s4.3,否则跳转到s4.4。
[0105]
s4.3,判读current
x
,currenty,currentz是否都处于预定义感知空间内,若是,计
算x
id
,y
id
,z
id
,其计算公式如下,若不是,跳出此次循环,继续下一个返回点的计算,
[0106][0107]
其中,x_space_min,y_space_min,z_space_min表示所定义感知空间的最小值,γ表示对感知空间进行体素化的分辨率。对计算出的x
id
,y
id
,z
id
进行取整,则可得到某一体素下所包含的点云个数。接着对current
x
,currenty,currentz进行r值的递增,递增公式如下:
[0108][0109]
跳转回循环开始,即重新执行s4.3。
[0110]
s4.4,若currentz大于感知空间所定义的最高值,按照公式(16)计算激光雷达与当前点之间的距离d,判断当前点是否已经超出激光雷达的有效检测范围,若已超出,则跳出此次循环,若返回点仍处于雷达的有效检测范围内,则按照s4.3进行计算,其中,距离d的计算公式如下:
[0111][0112]
s5,对感知空间内每个体素赋以权重:
[0113][0114]
在本发明的实例实施过程中,预定义感知空间内的所有体素权重都为1,表明所有位置下的体素具有相同的关注度。
[0115]
s6,通过引入的条件熵公式,即可计算得到当前激光雷达配置下的评估指数,计算公式如下,
[0116][0117]
其中,p(vi)为s4中所计算的每个体素内的点云个数。
[0118]
h代表最终的计算结果,即当前配置下的激光雷达评估指数。v代表体素,l0代表当前激光配置,i代表体素编号;代表某一特定体素在当前激光雷达配置下的评估指数。代表特定体素的权重,p(∑i)为s4中所计算的每个体素内的点云个数。通过对所有体素的评估值进行加权计算,即可得到当前激光雷达配置下的最终评估指数。激光雷达配置包括其相对于世界坐标系原点的旋转角矩阵(roll,pitch,yaw)及平移矩阵(x,y,z)。
[0119]
本发明能够将复杂的激光雷达安装位置问题转化为参数计算问题,能够实现对激
光雷达安装位置、角度的评估及最优架设位置的选择。使用了基于每体素点云的度量标准来衡量激光雷达在预定义感知空间中感知到的信息量。通过使用本发明中的方法可以简化原有激光雷达架设位置评估流程,即传感器架设-数据收集-模型训练-位置评估,节省了激光雷达位置评估的耗时,适用于多种道路结构,提高了灵活性,最终得到准确的激光雷达架设位置评估指数。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1