一种异常检测设备的制作方法
本发明属于机器视觉,具体涉及一种航空发动机叶片,内部结构组件异常缺陷、空气压缩机叶片、导管异常及机身机翼多余物异常检测设备。
背景技术:
1、飞机发动机叶片表面和内部结构组件的异常缺陷检测是发动机质检与维护中的一项重要工作,常见缺陷有划痕、多余物、破损、裂纹、卷曲和腐蚀等,及时发现发动机叶片和组件异常并进行排除,可有效避免飞机飞行过程中因发动机损坏而影响飞行安全;导管在装配到飞机上后,机体内部导管划痕、凹坑检查,需要借助反光镜,内窥镜等设备,但是仍然需要人去分析获取的数据受人经验,环境等影响容易错漏一些细微的划痕;安装某些成品是需要在机身上开孔,会产生较多的铁屑,虽然完工后会进行清洁,但是可能会在框与框的结合处因为处在夹角导致铁屑清理不彻底。特别是在机翼部门当口盖封闭后,再检测是否存在多余物只能通过敲击法判断是否有多余物,检测方法落后。
2、目前,在发动机总装开车后、飞机安装发动机并首飞后和飞机交付后用户使用到定检期时。发动机叶片及组件异常检查主要依靠地勤人员通过内窥镜进行人眼观察,这是一项冗长且需要注意力高度集中的工作,人为检查的精度易受到主观因素的影响。因此,为了提高检测精度、效率、降低检测成本,需要一种自动化缺陷检测的设备。传统缺陷检测方法大致可分为基于边缘检测的方法和基于形态学的方法。在理想的情况下,如果缺陷具有较高的对比度且图像背景噪声较小,传统方法可以对其进行高精度的检测。然而,这些方法在实际应用中会受到实际叶片表面刮痕和微小气孔等噪声的影响,使用边缘检测可以将与缺陷像素与全局背景分离,但是这类方法容易受到干扰,且对实际检测场地的光照变化十分敏感。由于发动机叶片检查需要借助内窥镜的镜头打光才能看清内部结构,因此会产生很多的噪点影响这类检测分析方法的精度。综上所述,传统异常检测算法易受到影响且提升空问有限,需要开发一套新的设备用于航空发动机叶片,内部结构组件异常、导管划痕,凹坑和机身机翼多余物进行分析检测。
3、针对大型空气压缩机、空分机组等叶片检测,目前也是通过内窥镜获取叶片画面,再通过人为分析,受人经验影响较大。基于上述问题,需要一种对叶片、管路等异常的检测设备,提高检测精度和效率。
技术实现思路
1、为了克服现有技术的不足,基于目前发动机叶片及部件、导管、机身机翼多余物检查和空分机组叶片等检测的工作规范,本发明是通过如下的技术方案来实现:一种异常检测设备,包括内窥镜镜头、便携式计算机/平板电脑及异常检测系统软件。
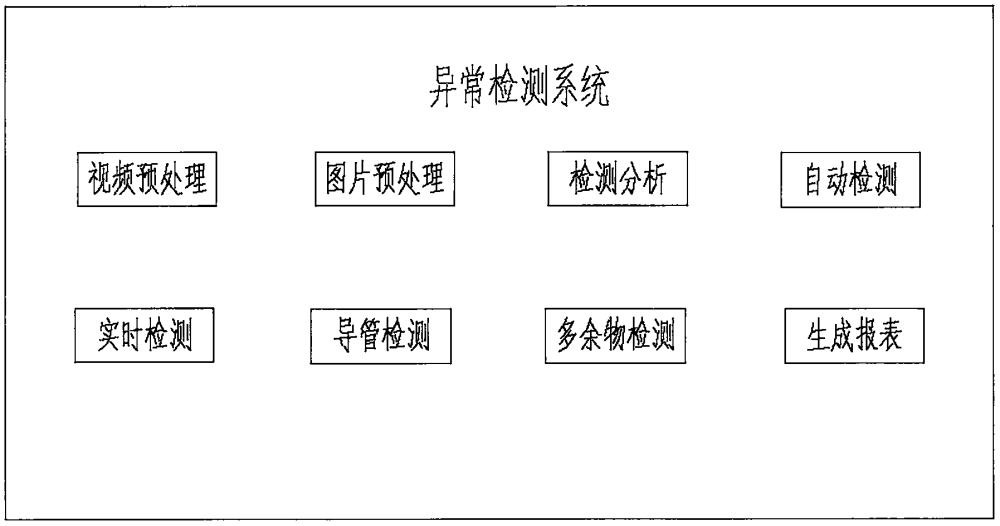
2、所述内窥镜镜头包括观察发动机内部的镜头和连接计算机的数据传输线,可分成不同直径的直视内窥镜镜头、侧视内窥镜镜头和连接镜头的硬线和软线,将内窥镜镜头插入发动机各级叶片的观察口盖获取各级叶片的画面,侧视内窥镜镜头用于观看转子叶片,直视内窥镜镜头静子叶片及内部结构;所述便携式计算机/平板电脑运行发动机叶片及内部结构异常的检测软件,同时将内窥镜的数据传输线接入计算机/平板电脑,通过计算机/平板电脑给内窥镜提供电源,并在计算机/平板电脑屏幕上接收内窥镜各级叶片的画面。可通过计算机/平板电脑拍照软件,进行拍照、录制和实时观看;所述异常检测系统软件包含视频预处理模块、图片预处理模块、检测分析模块、自动检测模块、实时检测模块、导管检测模块、多余物检测模块和分析报告模块。
3、所述视频预处理模块,将内窥镜录制的发动机叶片和结构组件的视频根据需要分解并输出保存至计算机上;所述图片预处理模块,将视频预处理得到的飞机叶片和结构组件的图片输入图片预处理模块,对其异常位置进行突出提高检测分析精度。图片预处理模块包含四种处理方法:滤波处理+自适应均衡化图像、灰度处理+自适应均衡化图像、自适应均衡化图像和灰度处理,根据发动机内部的拍摄环境选择合适图片处理方法;所述检测分析模块,将图片预处理输出的飞机叶片和结构组件的图片输入检测分析模块,对其图片中异常进行识别,并标注异常位置和异常类型,并将异常图片筛选输出保存至计算机指定文件夹;所述自动检测模块,将内窥镜录制的发动机叶片和结构组件的视频输入,对该视频中存在的异常进行自动检测,将异常位置的画面抽帧输出保存至计算机指定文件夹,并标记异常位置和类型;所述实时检测模块,对内窥镜获取的实时画面进行同步检测分析,将异常位置的画面抽帧输出保存至计算机指定文件夹,并标记叶片,发动机内部结构异常位置和类型;所述导管检测模块,对内窥镜获取的机身内部导管实时画面进行同步检测分析,将异常位置的画面抽帧输出保存至计算机指定文件夹,并标记导管异常位置和类型;所述多余物检测模块,对内窥镜获取的机身机翼内部实时画面进行同步检测分析,将机身机翼内部存在多余物位置的画面抽帧输出保存至计算机指定文件夹,并标记异常位置和类型。
4、所述分析报告模块将检测分析模块、自动处理模块、实时检测模块、导管检测模块、多余物检测模块,输出标注异常的飞机叶片,结构组件、导管划痕,凹坑、机身机翼存在多余物的图片,进行处理按照内窥镜传输至计算机画面中的顺序生成检测报告。
5、按照目前发动机、空分机组等叶片检查规范,提供三种异常的检测方法:1.通过内窥镜镜头在计算机上通过照相软件录制视频,再将视频进行视频预处理、图片预处理、检测分析和生成分析报告;2.将录制视频导入自动检测模块,对异常处进行抽帧保存,通过分析报告模块生成分析报告;3.通过内窥镜获取实时画面,使用实时检测模块调用获取的实时画面,并进行实时分析将异常处进行抽帧保存,通过分析报告模块生成分析报告。通过以上三种方法,可以对内窥镜镜头录制的叶片及结构组件的录制视频或获取的实时画面进行检测分析,并生成异常叶片及结构组件的分析报告。
6、按照目前导管检查规范,通过导管检测模块,将内窥镜镜头获取的实时画面进行检测分析,将导管存在划痕,凹坑的导管图片抽帧筛选出来,并生成导管划痕,凹坑的分析报告。按照目前机身机翼多余物的检查规范,通过多余物检测模块,将内窥镜镜头获取的实时画面进行检测分析,将机身机翼处存在铁屑,遗漏工具的图片抽帧筛选出来,并生成机身机翼多余物的分析报告。
7、本发明的目的是通过以下的技术方案来实现的:
8、步骤1:构建视频预处理模块,包含图片保存地址选择、视频导入地址选择、结果命名、分析帧数四个输入选项。所述图片保存地址和视频导入地址输入是通过点选文件夹的方法,选择相应图片保存文件夹和视频导入文件夹,视频导入地址中的视频来源是每级叶片和结构组件的孔探视频;所述结果命名是通过键盘输入的方式,对分解后导出的图片进行命名。一般对图片的命名为导入视频数据的名称,视频分解后每张图片的名称为“xxx_xs”,xxx表示输入的结果命名,x表示在视频中对应时间点,用于复查;所述分析帧数也是通过键盘输入的方式,根据需要分解视频的拍摄帧数来进行输入。如果拍摄视频的帧数为30帧每秒,视频帧数输入30表示每30帧即1秒截一次图,输入15表示每15帧即0.5秒截一次图,可以实际根据需要进行选择。运行视频预处理模块将导入的视频进行分解,并将自定义输入文件名称的图片集保存至图片保存地址选择的文件夹;
9、步骤2:构建图片预处理模块,包含结果保存地址选择、图片导入地址选择和处理方法三个选项。所述结果保存地址、图片导入地址输入是通过点选文件夹的方法,选择相应图片导出和图片导入文件夹;所述图片导入地址文件夹的选择为步骤1中数据导出地址的文件夹;所述处理方式包含四种处理方法:滤波处理+自适应均衡化图像、灰度处理+自适应均衡化图像、自适应均衡化图像和灰度处理,根据发动机内部的拍摄环境选择合适图片处理方法。运行图片预处理模块将步骤1视频预处理模块得到的视频分解的图片集进行相应处理,并将处理后的图片集保存至结果保存地址选择的文件夹;
10、步骤3:通过coco公开数据获取叶片,结构组件、导管等的异常缺陷图像,构成异常缺陷图片数据集;
11、步骤4:通过步骤2对异常缺陷图片数据集的异常位置进行强化处理,让异常缺陷更加明显,提高异常识别的准确率;
12、步骤5:对每张异常缺陷的图片进行标注,根据异常的类型,分别标注为划痕、多余物、破损、裂纹、卷曲和腐蚀;
13、步骤6:通过深度学习对标注好的数据集进行训练,得到训练好的叶片,结构组件、导管等识别的权重值;
14、步骤7:构建检测分析模块,包含数据导入地址、结果保存地址、筛选比例和结果命名四个选项。所述数据导入地址,结果保存地址是通过点选文件夹的方法,选择相应数据导入和结果保存地址的文件夹。所述筛选比例为根据训练好权重,对视频中异常识别的精度的设置,分为输出100%,输出80%和输出60%,分别表示异常全部输出,异常大于等于训练权重80%的异常输出,异常大于等于训练权重60%的异常输出,通过键盘在结果命名中输入这一级叶片的名称。所述数据导入文件夹,为步骤2中图片预处理后结果保存地址所选的文件夹。运行检测分析模块将步骤2中图片预处理模块得到的图片集进行检测分析,对异常位置进行标注和标注异常类型,并将检测到异常的图片集进行筛选保存至结果保存地址选择的文件夹;
15、步骤8:构建自动检测模块,包含视频导入地址、结果保存地址和筛选比例三个点选文件夹的选项。结果命名,分析帧数两个键盘输入项。所述视频导入地址为通过内窥镜录制的叶片及发动机内部结构的视频;所述结果保存地址为对视频分析后抽帧截取的叶片异常的地址;所述筛选比例为根据训练好权重,对视频中异常识别的精度的设置,分为输出100%,输出80%和输出60%,分别表示异常全部输出,异常大于等于训练权重80%的异常输出,异常大于等于训练权重60%的异常输出;所述结果命名为视频录制部位的命名,检测结果每张图片的名称为名称为“xxx_x f”,xxx表示输入的结果命名,x表示在画面中对应出现的次序;所述分析帧数为内窥镜镜头录制视频帧数,如内窥镜镜头帧数为30帧,分析帧数输入30表示每1秒对视频分析一次,如分析帧数输入15表示每0.5秒对视频分析一次。
16、步骤9:构建实时检测模块,包含结果保存地址,筛选比例点选文件夹的选项,结果命名和分析帧数键盘输入项。所述结果保存地址为实时分析后异常结果保存地址;所述结果命名为该级叶片的名称,检测结果每张图片的名称为名称为“xxx_x f”,xxx表示输入的结果命名,x表示在画面中对应出现的次序;所述筛选比例为根据训练好权重,对获取画面中异常识别的精度的设置,分为输出100%,输出80%和输出60%,分别表示异常全部输出,异常大于等于训练权重80%的异常输出,异常大于等于训练权重60%的异常输出;所述分析帧数为内窥镜镜头获取画面的帧数,如内窥镜镜头帧数为30帧,分析帧数输入30表示每1秒对获取画面分析一次,如分析帧数输入15表示每0.5秒对获取画面分析一次。
17、步骤10:构建导管检测模块,包含结果保存地址,筛选比例点选文件夹的选项,结果命名和分析帧数键盘输入项。所述结果保存地址为对导管实时分析后异常结果保存地址;所述结果命名为该导管的图号或者机体部位的名称,检测结果每张图片的名称为名称为“xxx_x f”,xxx表示输入的结果命名,x表示在画面中对应出现的次序;所述筛选比例为根据训练好权重,对获取画面中异常识别的精度的设置,分为输出100%,输出80%和输出60%,分别表示异常全部输出,异常大于等于训练权重80%的异常输出,异常大于等于训练权重60%的异常输出;所述分析帧数为内窥镜镜头获取画面的帧数,如内窥镜镜头帧数为30帧,分析帧数输入30表示每1秒对获取画面分析一次,如分析帧数输入15表示每0.5秒对获取画面分析一次。
18、步骤11:构建多余物检测模块,包含结果保存地址,筛选比例点选文件夹的选项,结果命名和分析帧数键盘输入项。所述结果保存地址为对机身机翼实时分析后异常结果保存地址;所述结果命名为该机体部位的名称,检测结果每张图片的名称为名称为“xxx_xf”,xxx表示输入的结果命名,x表示在画面中对应出现的次序;所述筛选比例为根据训练好权重,对获取画面中异常识别的精度的设置,分为输出100%,输出80%和输出60%,分别表示异常全部输出,异常大于等于训练权重80%的异常输出,异常大于等于训练权重60%的异常输出;所述分析帧数为内窥镜镜头获取画面的帧数,如内窥镜镜头帧数为30帧,分析帧数输入30表示每1秒对获取画面分析一次,如分析帧数输入15表示每0.5秒对获取画面分析一次。
19、步骤12:构建分析报告模块,包含数据库导入地址、结果保存地址和excel报表命名三个选项。其中数据库导入地址、结果保存地址是通过点选文件夹的方法,选择相应数据库文件夹和生成分析报告保存的文件夹。所述数据库导入地址是选择将各级叶片及结构异常数据汇总至以这台发动机命名的文件夹,所述excel报表命名为通过键盘输入这台发动机名称,进而生成整台发动机叶片及结构异常的分析报表。运行分析报告模块将步骤7至11中检测到异常的图片集生成excel分析报表,分析报表分为三列,第一列为异常图片,第二列为异常时间或出现次序,第三列为文件名称,第一行第一列文字标注异常图片,第一行第二列文字标注异常时间或出现次序,第一行第三列文字标注文件名称。第二行开始按照异常图片名称中时间或次序顺序自动依次排列。所述异常时间为提取图片名称xxx_x s中的x秒数或xxx_xf中frames顺序,所述文件名称为提取图片名称xxx_x s或xxx_xf中的xxx名称。
20、上述步骤1,2,7为一种组合的检测方法,步骤8,9,10,11为独立的检测方法。
21、由于采用本发明的一种异常检测设备,带来了如下的有益效果:
22、本发明方法基于连接计算机/平板电脑的内窥镜镜头获取发动机、空分机组等叶片,内部结构、机身机翼多余物和导管的画面,或者使用现有内窥镜录制视频数据。再通过计算机上检测软件,对异常处进行自动或实时检测分析,对异常位置的画面进行抽帧并保存至相应的文件夹,通过生成分析报告模块提取异常图片命名中位置信息和出现顺序信息,生成分析报告。相对现有的内窥镜设备,不仅具有拍摄,录制发动机内部叶片,结构、机身机翼多余物和导管异常的功能,有具备异常自动,实时分析的能力,可以极大提高工作效率和精度。
23、与现有技术相比,本发明操作逻辑简单,代替人工对异常进行分析极大解放了劳动力,提高了工作效率。
- 还没有人留言评论。精彩留言会获得点赞!