一种空间TDI-CCD相机动态调制传递函数测试装置
一种空间tdi-ccd相机动态调制传递函数测试装置
技术领域
1.本发明涉及空间光学成像系统地面模拟测试的技术领域,特别涉及一种空间tdi-ccd相机动态调制传递函数测试装置。
背景技术:
2.航空、航天技术是国内外优先发展技术领域之一,作为航空、航天飞行器有效载荷的高精度高可靠航空、航天相机研制工作成为了国家重点的发展和研究方向。tdiccd(time delay integration charge-coupled device)是一种目前广泛应用在高分辨率光学卫星上的图像采集装置,它具有灵敏度高、动态范围宽等的优点,在相同口径下能获得更高的图像质量。空间光学系统在轨对地成像与地面成像有很大的不同,成像质量不仅受限于光学系统、tdi ccd成像器件、系统装调等因素,还受限于tdi ccd行频与星地运动匹配程度、偏流角校正、卫星的微颤抖动、姿态变化和其他因素如离焦、大气、热学环境等。为了对低轨条件下、采用tdi ccd作为成像器件的光学成像系统的传递函数进行像质进行评测,在研制过程中地面模拟测试是必不可缺少的一环。
3.卫星绕地速度和地球自转速度在对星下点合成后的速度,称为为星下点速度。由于搭载在卫星上的tdi-ccd的特殊工作方式,要求同一列上的每一个像元都对同一目标曝光积分,才能保证成像质量。这就要求ccd的行扫描速率与景物的运动速率严格同步,不然将会造成像质下降。速度失配对调制传递函数的影响可以用下式来表示:
[0004][0005]
上式中f为空间频率,fn为奈奎斯特频率,n为tdi级次,p为ccd像素尺寸,v为理论扫描速率,δv为失匹配速率。在推扫方向上,当速度失配相同时,积分级次越大,造成的调制传递函数下降越大。基于以上分析本发明设计了星下点速度模拟模块,用于衡量系统的行扫描同步能力。
[0006]
当光学tdi-ccd相机以倾斜轨道运行时,由于地球自转速度的存在,使光学tdi-ccd相机绕地运行速度与合成星下点速度存在一个角度偏差,即为偏流角如图6中α角,并且随着纬度的变化而变化。
[0007]
当存在偏流角α时,被测tdi-ccd相机的行扫描方向与合成速度方向也不一致导致像质下降,为了消除偏流角的影响tdi-ccd系统的行扫描方向会通过一定的旋转机构将其消除。基于以上分析,本发明设计了偏流角模拟模块,用于衡量系统的偏流角消除能力。针对微结构tdi-ccd相机动态调制传递函即mtf(modulation transfer function)模拟测试技术的需要,提出一套地面模拟测试设备,并使用动态mtf这一成像系统最重要的指标之一对其进行性能评价。在实现相机成像的基础上,对相机在轨时的速高比及偏流角这两个像质影响因素进行模拟,保证相机入轨后性能与预期指标相符。
技术实现要素:
[0008]
为了实现上述发明目的,提供一种空间tdi-ccd相机动态调制传递函数测试装置,可提高模拟测试的真实性。
[0009]
为实现上述发明目的,本发明提供了以下技术方案:
[0010]
一种空间tdi-ccd相机动态调制传递函数测试装置,
[0011]
所述装置由均匀照明光学系统、目标靶模块、四维调整系统、光学准直系统、运动控制系统、主控计算机、光学平台、二维调整台、辅助调整模块组成,以上系统为被测tdi-ccd相机提供调制传递函数测试硬件条件;
[0012]
其中,所述均匀照明光学系统、目标靶模块、四维调整系统、光学准直系统、运动控制系统、主控计算机、二维调整台、及被测tdi-ccd相机均位于光学平台之上,光学平台用于提供光学平面基准;
[0013]
所述均匀照明光学系统、目标靶模块位于四维调整系统之上,所述目标靶模块的目标靶板位于光学准直系统的焦平面上;
[0014]
所述目标靶板由光学准直系统准直后生成无穷远目标并由位于二维调整台上的被测系统接收成像,并由主控计算机采集;
[0015]
进一步的,所述均匀光学照明系统由光学部分和机械部分组成;所述光学部分包括照明光源、椭球反光杯、可变光阑、准直器、复眼镜组、会聚镜组,照明面;所述照明光源位于椭球反光杯的前焦点上,经过椭球反光杯成像在可变光阑附近,可变光阑通过调整通光孔大小从而控制通光量,同时可变光阑也位于准直器的焦面处,光经准直器准直后进入复眼镜组,复眼镜组将准直光微分后再由会聚镜组会聚到照明面上,从而在照明面上形成均匀照明;照明面处的大小覆盖,目标靶板区域,照明数值孔径应略大于光学准直系统。
[0016]
所述机械部分包括光源安装架、散热风扇、反光杯固定架、可变光阑安装架、准直镜固定架、复眼镜筒、会聚镜筒和第一固定板;
[0017]
光源安装架用于安装、固定、调整光源使其位于椭球反光杯的前焦点上;椭球反光杯固定架用于安装固定椭球反光杯;可变光阑安装架用于安装固定可变光阑并使其位于椭球反光杯的另一个焦点上;准直镜固定架用于安装固定准直器;复眼镜筒用于安装固定复眼镜组;会聚镜筒用于安装固定会聚镜组;第一固定板则用于将均匀光学照明系统安装于四维调整机构的第二固定板上;散热风扇用于为照明光源进行散热,以免采用热光源时产生过多的热量。
[0018]
进一步的,所述的均匀照明光学系统产生与目标靶板大小对应的照明区域、与被测tdi-ccd相机对应的照明光强、与光学准直系统对应的照明发散角的照明。
[0019]
进一步的,所述目标靶模块由所述目标靶板、第一支撑板和第二支撑板组成;目标靶板位于光学均匀照明系统的照明面上;
[0020]
所述目标靶板为刀口目标或条纹靶,且安装于所述第一支撑板上,第一支撑板和第二支撑板相连接,第二支撑板安装于四维调整系统的匀速位移台上,并随匀速位移台产生左右匀速位移,从而相对于光学准直系统产生匀速位移。
[0021]
进一步的,所述四维调整系统由匀速位移台、第二固定板、摇摆台、定点位移台和升降台组成;其中,升降台设置于四维调整系统的最下方,定点位移台位于升降台之上,两者组合用于调整目标靶板与光学准直系统焦平面的位置关系,其中升降台用于调整目标靶
板相对于光学准直系统上下运动,定点位移台用于调整目标靶板相对于光学准直系统前后运动,升降台和定点位移台调整目标靶板至光学准直系统焦深范围之内;摇摆台位于定点位移台之上,用于调整目标靶板相对于光学准直系统的角度,从而产生模拟偏流角;第二固定板位于摇摆台之上,用于安装均匀光学照明系统,均匀光学照明系统的照明面及目标靶模块的目标靶板设计高度位于摇摆台的圆心附近,使得在调整摇摆台角度的时候,均匀光学照明系统的照明面及目标靶模块的目标靶板不会产生位移量;匀速位移台位于摇摆台之上,用于调整目标靶板的匀速运动,从而模拟产生一定的速高比。通过该结构设计,在目标靶板相对于光学准直系统进行角度和位移调整时,照明面始终保持相对静止。
[0022]
进一步的,所述目标靶板在匀速位移台作用下产生匀速运动进而在光学准直系统焦平面处经过,从而产生一定的速高比;所述光学准直系统的有效视场垂直方向大于被测tdi-ccd相机。
[0023]
进一步的,所述运动控制系统,用于控制调整四维调整系统的高低、前后、摇摆角度和匀速运动,其中对于升降台、定点位移台为定点位移控制,对于摇摆台为定点角度控制,其控制角度范围为偏流角调整范围,对于匀速位移台则为往复匀速运动控制,其运动速度为产生所需速高比的速度。
[0024]
进一步的,所述被测tdi-ccd相机放置于二维调整台之上,所述二维调整台用于被测tdi-ccd相机的俯仰角和水平角,使被测tdi-ccd相机对准模拟目标,从而成像于tdi-ccd相机之上。辅助调整模块用于目标靶模块初始位置的调整,即将目标靶板中心位置调整至光学准直系统的中心视场处。
[0025]
所述运动控制系统控制四维调整系统产生角度和位移运动,从而实现目标靶模块相对于光学准直系统的焦平面产生相对运动,进而模拟了被测tdi-ccd相机在轨运动时相对于星下点目标的速高比和偏流角。
[0026]
进一步的,所述被测tdi-ccd相机行扫描方向与由匀速位移台带动的目标靶板位移方向夹角为时,此时认为偏流角为;当想设置为某一偏流角时,四维调整系统中的摇摆台通过角度调整带动目标靶板相对于光学准直系统的焦平面产生角度变化从而实现偏流角的调整;
[0027]
进一步的,所述四维调整系统中的匀速位移台位于摇摆台之上,用于调整目标靶板的相对于光学准直系统匀速运动所述被测tdi-ccd相机位于某轨高时产生的速高比,设被测系统tdi-ccd相机的光学系统焦距为f1,行频为h,像元大小为p,光学准直系统的焦距为f2,则需要调整匀速位移台的速度v计算如下式所示:
[0028][0029]
进一步的,辅助调整模块由二维辅助调整平面镜和角锥棱镜组成,用于辅助调整目标靶模块和光学准直系统之间的位置关系,即将目标靶模块调整为光学准直系统视场中心及光学准直系统的焦深范围之内。
[0030]
本发明的有益效果在于:
[0031]
本发明采用四维调整台带动平面测试图案相对于光学准直系统运动从而产生具有偏流角控制和速高比控制的无穷远目标,从而对tdi-ccd相机进行像质测试。该方法与现有测试方式相比,具有成本低、操作简便、对于不同被测tdi-ccd测试适用性强的特点。
附图说明
[0032]
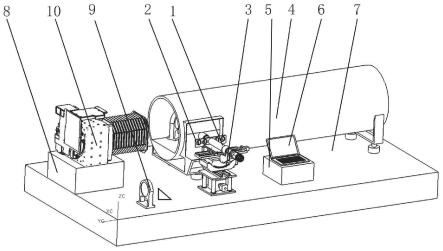
图1是本发明装置结构示意图;
[0033]
图2是本发明均匀照明系统结构示意图;
[0034]
图3是本发明目标靶模块结构示意图;
[0035]
图4是本发明四维调整系统结构示意图;
[0036]
图5为本发明辅助调整模块结构示意图;
[0037]
图6为偏流角形成示意图;
[0038]
图7分别为条纹靶成像及其处理示意图;
[0039]
其中,a为条纹靶成像图,b为条纹靶处理图;
[0040]
图8为刀口靶成像及处理示意图;
[0041]
其中,
[0042]
a为倾斜刀口图像及其区域选择示意图;
[0043]
b为边缘拟合及插值运算示意图;
[0044]
c为曲线拟合阶跃函数示意图;
[0045]
d为微分求取线扩散函数示意图。
[0046]
图中零部件的标号说明:
[0047]
1.均匀光学照明系统、2.目标靶模块、3.四维调整系统、4.光学准直系统、5.运动控制系统、6.主控计算机、7.光学平台、8.二维调整台、9.辅助调整模块、10.被测tdi-ccd相机、11.照明光源、12.椭球反光杯、13.可变光阑、14.准直器、15.复眼镜组、16.会聚镜组、17.照明面、18.光源安装架、19.散热风扇、20.反光杯固定架、21.可变光阑安装架、22.准直镜固定架、23.复眼镜筒、24.会聚镜筒、25.第一固定板、26.第一支撑板、27.第二支撑板、28.目标靶板、29.匀速位移台、30.第二固定板、31.摇摆台、32.定点位移台、33.升降台、34.二维辅助调整平面镜、35.角锥棱镜。
具体实施方式
[0048]
以下结合附图对本发明作进一步说明。
[0049]
由附图1-5所示,本发明所述一种用于空间tdi-ccd相机动态mtf测试装置,由均匀照明光学系统1、目标靶模块2、四维调整系统3、光学准直系统4、运动控制系统5、主控计算机6、光学平台7、二维调整台8和辅助调整模块9组成;
[0050]
其中,所述均匀照明光学系统1、目标靶模块2、四维调整系统3、光学准直系统4、运动控制系统5、主控计算机6、二维调整台8、辅助调整模块9及被测tdi-ccd相机10均位于光学平台7之上,光学平台7用于提供光学平面基准;
[0051]
均匀照明光学系统1、目标靶模块2位于四维调整系统3之上。
[0052]
开启均匀照明光学系统1,目标靶板28设置为星点,将角锥棱镜35放置于光学准直系统4出光口处,通过四维调整系统3调整目标靶模块2,直至目标靶板28返回星点像位于光学准直系统4的视场中心,此时目标靶板28调整至光学准直系统4的视场中心;
[0053]
将角锥棱镜35更换为二维辅助调整平面镜34,通过二维角度的调整,使得返回星点像达到能量集中度最大位置,此时目标靶板28调整至光学准直系统4的焦深范围之内;
[0054]
设置所目标靶板28(条纹靶或刀口靶),将其安装于目标靶模块2之上,打开均匀光
学照明系统1,将被测tdi-ccd相机10放置于二维调整台8上,且位于光学准直系统4的出光口位置。当采用目标靶板28为条纹靶时,首先根据被测tdi-ccd相机10所需要的空间频率f
n1
(一般为奈奎斯特)、焦距f1及光学准直系统4的焦距f2,计算选择条纹靶的空间频率f
n2
如下式所示:
[0055][0056]
根据偏流角和速高比的测试需求,通过公式(2)计算四维调整系统对应的位移速度和角度。运动控制系统5控制四维调整系统3产生相对应的角度和位移速度,从而实现目标靶模块2相对于光学准直系统4的焦平面产生相对运动,进而模拟了被测系统在轨运动时相对于星下点目标的速高比和偏流角。
[0057]
目标靶板28由光学准直系统4准直后生成无穷远目标并由位于二维调整台8上的被测系统接收成像,并由主控计算机6采集图像;
[0058]
查看主控计算机6图像的灰度,并调整均匀光学照明系统1照明光强使被测tdi-ccd相机10成像处于合适的曝光。
[0059]
利用主控计算机6采集到的图像,若采用的目标靶板28为刀口靶,则利用傅里叶变换法计算调制传递函数mtf;若采用的目标靶板28为条纹靶,则利用对比度传递函数ctf间接计算调制传递函数mtf。具体计算方法描述如下。
[0060]
目标靶板28为条纹靶时,如图7中a所示,采集后的图形如图7中b所示。在行方向选取条纹靶一行数据记为x(n),n为列数。统计该行方向灰度值最高值x
max
和最小值x
min
,利用下式计算系统的调制传递函数mtf(f):
[0061][0062][0063]
如果空间频率f为奈奎斯特频率,则(4)式可以简化为下式5所示。
[0064][0065]
目标靶板28为刀口靶时,首先对刀口靶区域进行选择,如图8中a的框形所示;对倾斜刀口区域进行插值运算,增大边缘的采样频率,如图8中b所示;然后对插值曲线进行拟合,消除由于噪声等带来的突变点,如图8中c所示;最后由阶跃函数微分后求取线扩散函数进而采用快速傅里叶变换fft求取调制传递函数mtf,如图8中d所示。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1