一种基于移动RFID阅读器和双标签的三维目标感知方法
本发明涉及三维目标感知方法,尤其涉及一种基于移动rfid阅读器和双标签的三维目标感知方法。
背景技术:
1、基于rfid(radio frequency identification)信号进行定位的系统主要是利用阅读器接收到的附着在被感知目标上的标签所反射的信号信息来估计目标的位置。根据使用的不同信号类型,将rfid方法主要分为基于信号强度和基于信号相位测量两种类型。而基于信号强度值(received signal strength,rss)测量的方法又分为基于rss指纹及基于路径损耗模型的rss测距两种方法。
2、对于基于电磁波的传输损耗模型将rss信息转化为距离信息,再进行测距定位的方法而言,ni等在文献(l.m.ni,yunhao liu,yiu cho lau and a.p.patil,"landmarc:indoor location sensing using active rfid,"proceedings of the first ieeeinternational conference on pervasive computing and communications,2003.(percom 2003).,2003,pp.407-415,doi:10.1109/percom.2003.1192765)中开创性地提出了landmarc系统,该系统通过在待定位区域部署一系列的rfid标签,基于阅读器接收到的一系列rss测量值来进行定位。但是,rss信息容易受到环境干扰导致不稳定,且为了获得更高的定位精度,需要配备较高密度的参考标签。
3、文献(p.v.nikitin,r.martinez,s.ramamurthy,h.leland,g.spiess andk.v.s.rao,"phase based spatial identification of uhf rfid tags,"2010ieeeinternational conference on rfid(ieee rfid 2010),2010,pp.102-109,doi:10.1109/rfid.2010.5467253)提出了stpp算法,该方法利用阅读器天线与标签之间的距离变化所引起的相位变化来确定这些标签之间的相对位置。该方法只能得到目标之间的相对位置,且准确率不够高;为得到更高准确率需要额外增加设备的部署或者进行校准。
4、除此之外,基于rifd的相位差转化为距离差进行定位也逐渐成为研究的热点之一。文献(t.liu,l.yang,q.lin,y.guo and y.liu,"anchor-free backscatterpositioning for rfid tags with high accuracy,"ieee infocom 2014-ieeeconference on computer communications,2014,pp.379-387,doi:10.1109/infocom.2014.6847960)通过部署双天线测得标签相对于两根天线的相位差,再结合距离差获得了12.8cm的平均定位精度。而文献(a.r.chatzistefanou and a.g.dimitriou,"taglocalization by handheld uhf rfid reader and optical markers,"2022ieee 12thinternational conference on rfid technology and applications(rfid-ta),2022,pp.9-12,doi:10.1109/rfid-ta54958.2022.9924090)提出了使用卡尔曼滤波处理摄像机获取的图像序列,从而得到阅读器的轨迹,再结合从位置未知的标签处收集的相位差测量值来实现标签的三维估计。文献(x.liu et al.,"accurate localization of taggedobjects using mobile rfid-augmented robots,"in ieee transactions on mobilecomputing,vol.20,no.4,pp.1273-1284,1april 2021,doi:10.1109/tmc.2019.2962129)实现了一个移动rfid机器人定位(mrl)系统。装载两个垂直部署的天线的阅读器,在仓库通道直线运动过程中不断获取货架上标签的相位差与时间信息,再利用天线轨迹与目标标签的几何关系,实现在二维与三维定位中较高精度。但在三维mrl系统定位待测目标中,y维度与z维度定位精度较低。
5、将相位与信号强度结合也是rfid定位中值得关注的方向。文献(s.zhang,y.fu,d.jiang and x.liu,"rfid localization based on multiple feature fusion,"201815th annual ieee international conference on sensing,communication,andnetworking(secon),2018,pp.1-2,doi:10.1109/sahcn.2018.8397148)首先使用rss快速缩小目标标签的可能区域,再使用相位信息来细化位置估计,但其需要部署大量阅读器与天线来实现较小的网格来实现厘米级定位精度。
技术实现思路
1、发明目的:本发明的目的是提供一种能降低计算复杂度且获得更高的定位精度的基于移动rfid阅读器和双标签的三维目标感知方法。
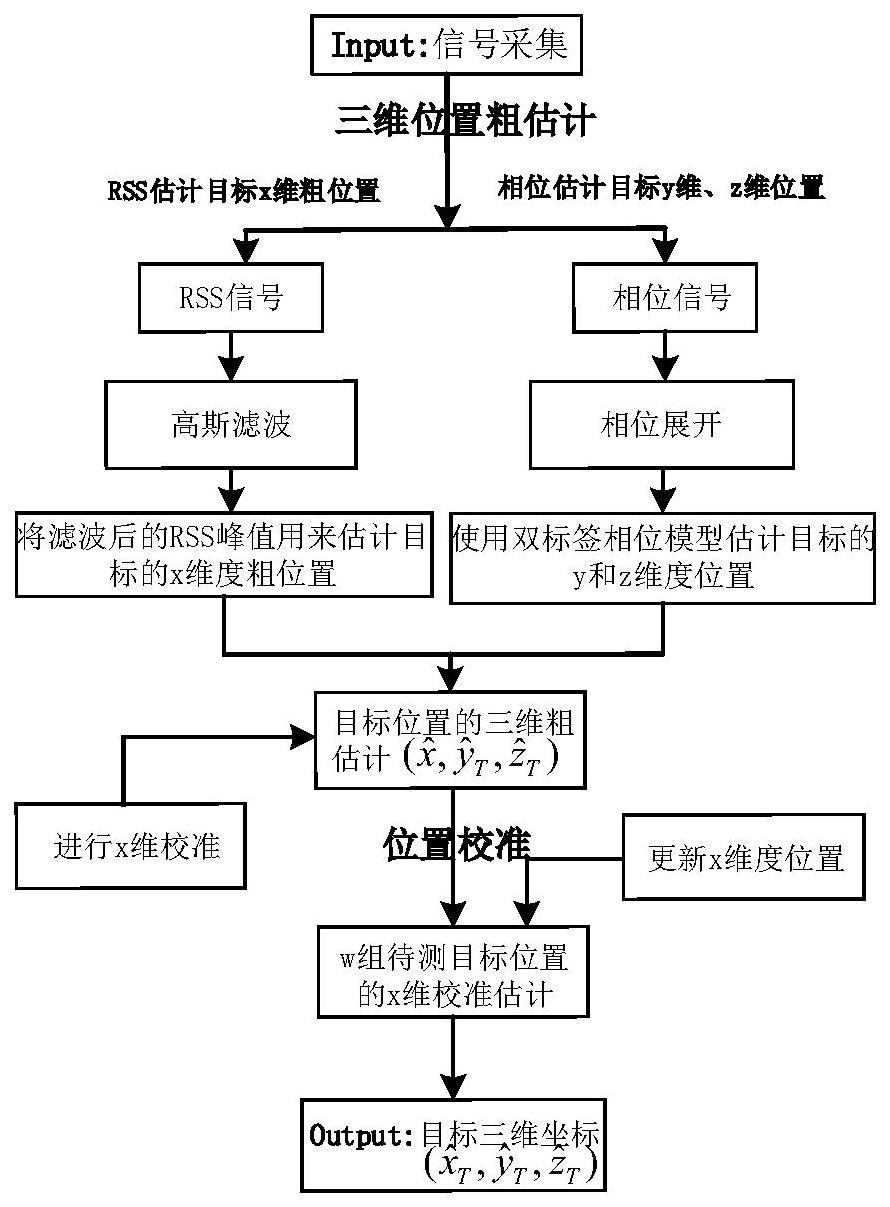
2、技术方案:本发明的三维高精度目标感知方法,包括步骤如下:
3、s1,将rfid阅读器装载于机器人上,通过机器人的运动来收集一组粘贴在被感知目标上的标签所反射的rss及相位信息;并对rss和相位信息进行滤波;
4、s2,根据滤波后的rss信息获取标签的rss峰值时刻,将此峰值与机器人运动的速度相乘,得到标签相对于货架长度方向x维度的粗略位置信息;随后,基于预处理后的相位信息估计被感知目标沿货架深度方向y维度和高度方向z维度的粗略位置信息;
5、s3,将得到的待测目标长度、高度和深度信息作为初始值,基于mrrdt算法对被感知目标的位置信息进一步校准,获得精确的位置信息。
6、进一步,步骤s1中,对机器人移动的总时间段进行n次采样,设标签ta在tn时刻获得的来自第i根天线的rss值为rssa,i(tn),标签tb在tn时刻获得的来自第i根天线的rss值为rssb,i(tn);其中,i=1、2,分别对应阅读器的上天线和下天线;n∈[1,n],则得到机器人总的运动时长采集到的所有rss值,构成矩阵如下:
7、rss=[rssa,1 rssb,1 rssa,2 rssb,2]t
8、其中,
9、rssa,i=[rssa,i(t1),...,rssa,i(tn),...,rssa,i(tn)]
10、rssb,i=[rssb,i(t1),...,rssb,i(tn),...,rssb,i(tn)]
11、
12、
13、其中,s表示采样次数,tn,s表示在时刻tn的第s个采样点得到的rss;
14、定义标签a与标签b的信号强度差值为disrssa,b,则有:
15、
16、其中,rssa(tn)为在tn时刻阅读器接收到来自标签a的信号强度,rssb(tn)为在tn时刻阅读器接收到来自标签b的信号强度。
17、进一步,步骤s1中,对时刻tn采集到的信号强度值rss(tn)进行高斯滤波,随后,对同一时刻获得的多组值取平均值进行平滑处理,处理后的rss矩阵为rss′,表示为:
18、rss′=[rss′a,1 rss′b,1 rss′a,2 rss′b,2]t
19、其中,
20、rss′a,i=[rss′a,i(t1),...,rss′a,i(tn),...,rss′a,i(tn)]
21、rss′b,i=[rss′b,i(t1),...,rss′b,i(tn),...,rss′b,i(tn)]
22、其中,i=1、2,分别对应阅读器的上天线和下天线。
23、进一步,步骤s2中,待测目标在x维度的初始位置估计实现步骤如下:
24、设rss′的峰值所对应的时刻分别为ta,1、ta,2、tb,1、tb,2,令t⊥表示目标距离天线最近的时刻,则有:
25、
26、得到待测目标在x维度的初始位置估计值表示为:
27、
28、其中,v表示机器人的移动速度。
29、进一步,步骤s2中,采用双标签相位模型来估计待测目标在y和z维度的位置,具体实现步骤如下:
30、s21,设定待测目标分别粘贴了上、下两个标签ta和tb,两个标签之间的距离为da,b,da,i(tn)、db,i(tn)分别表示时刻tn阅读器的第i根天线与标签ta和tb之间的距离,则有:
31、
32、其中,分别表示tn时刻标签ta、tb和阅读器的第i根天线之间的相位校准值,λ表示阅读器所发射的电磁波对应的波长;
33、s22,天线ai在整个进程中的每个时刻与标签ta、tb所对应的距离向量da,i、db,i分别表示为:
34、da,i=[da,i(t1),...,da,i(tn),...,da,i(tn)]
35、db,i=[db,i(t1),...,db,i(tn),...,db,i(tn)]
36、在tn时刻,ai所在位置为ai(tn),过点ai(tn)作标签ta、tb所在直线的垂线,交于点gi,那么标签ta和ai(tn)及gi三点可构成直角三角形,且标签tb和ai(tn)及gi三点也可构成直角三角形;故在时刻tn有:
37、
38、其中,表示tn时刻标签tb和投影点gi之间的距离;
39、则有:
40、
41、再待测目标的位置关系得此时刻估计的目标z维度位置zt,i(tn)满足下式:
42、
43、再对所有时刻的待测目标的z维度估计值zt,i取平均,则有:
44、
45、同时,在标签tb和ai(tn)及gi三点所构成的直角三角形中有:
46、
47、其中,为tn时刻的点gi与天线ai(tn)之间的距离;
48、然而y维度的真实位置仅在天线垂直于标签t⊥时刻求得,令实际y值为结合整个进程求解tn时刻所对应的y值,则有:
49、
50、式中t⊥表示目标距离天线最近的时刻,v表示机器人的移动速度;
51、再对y(tn)求整个进程的平均值其中,tn∈[t1,tn],则有:
52、
53、对上天线a1、下天线a2所获得的两组取平均值有:
54、
55、最终,得到待测目标的初始位置粗估计值为
56、进一步,步骤s3中,采用基于泰勒级数展开的校准算法,对初始位置估计值进一步校准,具体实现步骤如下:
57、将整个时间进程tn被平均分为三个等长的部分,分别为[t1,...,tw]、[tw+1,...,t2w]、[t2w+1,...,tn],其中n=3w;设与tn、tn+w和tn+2w三个时刻对应的上天线a1位置分别为r1、e1、j1,在相同时刻下天线a2所对应的位置分别为r2、e2、j2;标签ta和r1、e1及j1四点构成一个平面,设标签ta在r1、e1与j1三点所在直线的投影点为m1,故r1、e1与j1三点分别与标签ta、m1两点构成三个直角三角形和因此有:
58、
59、再由标签ta在不同时刻存在后向散射的相位与距离的对应关系,得到:
60、
61、在xa,1a1(t1)ya,1平面中,标签ta的位置表示为(xa,1,ya,1),结合标签ta在三维校准坐标系和二维平面坐标系中的位置关系,得到:
62、
63、由于速度v以及时间点tn、tn+w、tn+2w已知,故得到:
64、
65、联合上述四式得到:
66、
67、并进行泰勒级数展开,并待测目标的x维度和y维度的粗估计作为初始值,得到:
68、
69、其中,
70、
71、得到标签ta分别在二维平面中的xa,1轴、ya,1轴投影分别为xa,1、ya,1,分别对应其中,为待测目标的标签ta的x轴真实位置;
72、同理,标签ta和r2、e2及j2四点构成一个平面,求得其中,为待测目标的标签ta的x轴真实位置;
73、将得到的xa,1、xa,2为估计的标签ta在x轴位置,取均值处理,则有:
74、
75、其中,xa为标签ta的真实x轴位置估计;
76、设m1、m2所在直线投影于x轴相交于点om,取m1、m2所在直线为zm轴,过om点平行于y轴的直线为ym轴;在校准算法yoz平面坐标系中,标签ta此时在zm轴投影点记为p、m2与标签ta构成直角三角形且p、m1与标签ta构成直角三角形,故得:
77、
78、其中,为p与m1点之间的距离;最终得到:
79、
80、则三维坐标(xa,ya,za)为tn、tn+w、tn+2w三个时刻通过校准算法获取的标签ta的三维坐标;
81、取x维度的估计值的方差的倒数作为权重对x维坐标进行校准,得到待测目标的x维度坐标更新为:
82、
83、其中,xa,fin为更新后的标签ta的x维坐标,xb,fin为更新后的标签tb的x维坐标;
84、最后,得到待测目标的最终三维坐标位置估计为
85、本发明与现有技术相比,其显著效果如下:
86、1、推导了基于双标签相位模型感知目标相对于货架的高度的闭式解:首先,将双标签获得的相位转化为距离模型;随后,利用双标签与阅读器之间的几何关系,得到目标相对于货架的高度所满足的函数关系式;高度估计的平均误差较低,达到了厘米级精度;
87、2、提出了一种三维位置粗估计与位置校准相结合的解决方案,分别结合rss峰值信息与双标签相位模型进行初始估计,随后进行x维校准,对初始x维度估计值进行修正;与现有的定位算法相比,本发明的计算复杂度低且可以获得更高的定位精度,定位误差在4cm左右。
- 还没有人留言评论。精彩留言会获得点赞!