一种基于深度学习的水下目标方位估计方法、介质及系统
1.本发明属于水下探测领域,具体而言,涉及一种基于深度学习的水下目标方位估计方法、介质及系统。
背景技术:
2.目前常用的目标方位估计(direction of arrival, doa)方法有常规波束形成法(conventional beamforming, cbf)、最小方差无失真响应法(minimum variance distortionless response,mvdr)、多重信号分类法(multiple signal classification, music)等,这些方法在估计水下目标的doa时,往往不能兼顾较高的分辨能力和较快的处理速度。
3.随着深度学习算法的发展和计算机计算能力的提升,深度学习被广泛应用于水声领域,其中就包括水下目标的doa估计。相关研究人员通常是将doa问题看作一个多分类问题,只训练一个神经网络,网络的输出对应每一个方位出现目标的概率值,最大概率值对应的方位即为目标的真实方位(ozanich e. a feedforward neural network for direction-of-arrival estimation[j], journal of the acoustical society of america, 2020, 147(3):2035-2048.)。然而,这种处理方法的旁瓣较高,在低信噪比时误差较大,导致方位估计性能下降;而且需同时对全方位进行训练,造成时间的浪费,实用性也随之降低。
技术实现要素:
[0004]
有鉴于此,本发明提供一种基于深度学习的水下目标方位估计方法、介质及系统,能够改善水下目标的doa估计旁瓣较高,在低信噪比时误差较大,导致定位性能下降的问题;也能够改善此前的深度学习类方法需同时对全方位进行训练,造成时间的浪费,实用性也随之降低的问题。
[0005]
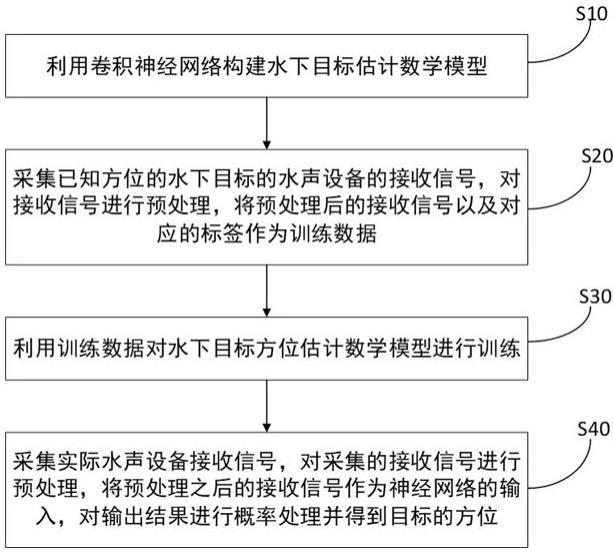
本发明是这样实现的:本发明第一方面提供一种基于深度学习的水下目标方位估计方法,其中,包含以下步骤:s10:利用卷积神经网络构建水下目标估计数学模型;s20:采集已知方位的水下目标的水声设备的接收信号,对接收信号进行预处理,将预处理后的接收信号以及对应的标签作为训练数据;s30:利用训练数据对水下目标方位估计数学模型进行训练;s40:采集实际水声设备接收信号,对采集的接收信号进行预处理,将预处理之后的接收信号作为神经网络的输入,对输出结果进行概率处理并得到目标的方位。
[0006]
其中,所述水声设备为均匀线列阵,所述水声设备接收信号为均匀线列阵接收的远场窄带信号,其中,所述均匀线列阵接收的信号为远场窄带信号,记为:;
式中,是接收信号的幅度,是接收信号的相位,ω是接收信号的角频率,。
[0007]
所述远场窄带信号符合以下公式,也就是说在窄带远场信号源的假设下,可以推出下式成立:;其中表示第个声源辐射的信号到阵列产生的时延,表示第个声源辐射信号的角频率,表示声源的个数。
[0008]
因此可以得到均匀线列阵第个阵元的接收信号为:;式中,为第个阵元对第个接收信号的增益,表示第个阵元在时刻的噪声,表示第个信号到达第个阵元时相对于参考阵元所产生的时延,表示均匀线列阵阵元的个数。
[0009]
进一步的,当所述均匀线列阵是各向同性的且不存在通道不一致时,由于互耦等因素的影响,增益可以忽略,即可以视为。
[0010]
将个阵元在特定时刻接收的信号写成列阵形式,表示为:;上式解释如下:;上式中,为维阵列快拍数据向量,为维噪声数据向量,为维向量,为维流形矩阵,且:;其中:;式中,,是声速,是第个声源辐射信号的波长。
[0011]
之后利用下式得到协方差矩阵:;其中,所述步骤s20中对所述水声设备接收信号进行的预处理的方法为:得到水声设备接收信号的协方差矩阵,所述协方差矩阵为一个m*m维的矩阵,其中m表示阵元的个数,提取其实部标记为,所述为一个m*m维的矩阵,提取其虚部标记为,也为一个m*m维的矩阵,之后将所述以及所述组合成一个m*m*2维的矩阵,记为。
[0012]
然后,对每一个方位训练一个神经网络,其输入是协方差矩阵处理后的矩阵,当有目标存在时其标签为[1,0],无目标存在时,其标签为[0,1],所述神经网络的卷积层的大小为[1,1,2]且只包含一个卷积核,无池化层,全连接层的输出为一个1*2维的向量, 第一个值表示这个方位有目标的概率,第二个值表示这个方位无目标的概率。损失函数选取交叉熵损失函数,其数学定义式在被问题中可写为下式:
;其中,分别表示真实的标签和网络的输出向量。
[0013]
激活函数采用relu函数,其数学定义式如下:;其中,所述步骤“对输出结果进行概率处理并得到目标的方位”中对输出结果进行概率处理的方法为:第k个方位上的网络的输出向量为,对于第k个方位的输出,表示第k个方位出现目标的概率,表示不出现目标的概率,对输出结果中的每个方位建立目标概率向量,并重写为,之后将每一个方位对应的网络的有目标存在时的概率组合起来,并组成一个1*k维的向量为,其值表示每个方位出现目标的概率,通过每个方位出现目标概率值的大小确定在这个方位是否出现目标。
[0014]
其中,若概率值大于0.6则表明该方位出现目标,也可根据经验判断概率值与出现目标情况之间的关系。
[0015]
本发明第二方面提供一种计算机可读存储介质,其中,所述计算机可读存储介质存储有程序代码,用于执行上述的一种基于深度学习的水下目标方位估计方法。
[0016]
本发明第三方面提供一种基于深度学习的水下目标方位估计系统,其中,包含上述的一种计算机可读存储介质。
[0017]
与现有技术相比较,本发明提供的一种基于深度学习的水下目标方位估计方法、介质及系统的有益效果是:利用卷积神经网络,输入预处理过后的水平线列阵接收信号的协方差矩阵,训练若干个神经网络,将原来的多分类问题转化为在每一个方位上的二分类问题,对于每一个方位都单独训练一个网络,用来判断这个方位出现目标的概率值,增强了结果的准确性,能够改善水下目标的doa估计旁瓣较高,在低信噪比时误差较大,导致估计性能下降的问题;将原来的多分类问题视为在每一个方向上的二分类问题,使得其将一个复杂的问题视为很多个简单的问题,同时由于它是在每一个方位上都有一个神经网络,能够改善此前的深度学习类方法需同时对全方位进行训练,造成时间的浪费,实用性也随之降低的问题。
附图说明
[0018]
为了更清楚地说明本发明实施例的技术方案,下面将对本发明实施例的描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0019]
图1为一种基于深度学习的水下目标方位估计方法步骤图;图2为均匀线列阵对窄带远场信号的接收示意图;图3为本发明使用的卷积神经网络的示意图;图4为本发明与其他方法的仿真估计结果对比;图5为本发明和其他方法双目标仿真时的正确率随着信噪比的变化对比;图6为本发明和其他方法对swellex-96的s-59event实验数据在3000快拍下的处理结果对比;
图7为本发明和其他方法对swellex-96的s-59event处理的耗时对比;
具体实施方式
[0020]
为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
[0021]
因此,以下对在附图中提供的本发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
[0022]
应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
[0023]
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0024]
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
[0025]
如图1-7所示,是本发明提供的一种基于深度学习的水下目标方位估计方法的第一实施例,在本实施例中,包含以下步骤:s10:利用卷积神经网络构建水下目标估计数学模型;s20:采集已知方位的水下目标的水声设备的接收信号,对接收信号进行预处理,将预处理后的接收信号以及对应的标签作为训练数据;s30:利用训练数据对水下目标方位估计数学模型进行训练;s40:采集实际水声设备接收信号,对采集的接收信号进行预处理,将预处理之后的接收信号作为神经网络的输入,对输出结果进行概率处理并得到目标的方位。
[0026]
其中,卷积神经网络指的是一类包含卷积计算且具有深度结构的前馈神经网络,是深度学习的代表算法之一;水下目标方位估计目的是确定水下载体和设备的方位。
[0027]
其中,在上述技术方案中,所述水声设备为均匀线列阵,水声设备接收信号为均匀线列阵接收的信号为远场窄带信号,其中,均匀线列阵接收的远场窄带信号记为:;式中,是均匀线列阵对远场窄带信号,是接收信号的幅度,是指某一时刻,是接收信号的相位,ω是接收信号的角频率,。
[0028]
所述远场窄带信号符合以下公式,也就是说在窄带远场信号源的假设下,可以推
出下式成立:;其中表示第个声源辐射的信号到阵列产生的时延,表示第个声源辐射的信号的角频率,表示声源的个数。
[0029]
因此可以得到第个阵元的接收信号为:;式中,为第个阵元对第个接收信号的增益,表示第个阵元在时刻的噪声,表示第个信号到达第个阵元时相对于参考阵元所产生的时延,表示均匀线列阵阵元的个数。
[0030]
进一步的,当均匀线列阵是各向同性的且不存在通道不一致时,由于互耦等因素的影响,增益可以忽略,即可以视为。
[0031]
将个阵元在特定时刻接收的信号写成列阵形式,表示为:;上式解释如下:;上式中,为维阵列快拍数据向量,为维噪声数据向量,为维向量,为维流形矩阵,且:;其中:;式中,,是声速,是第个声源辐射信号的波长。
[0032]
之后利用下式得到协方差矩阵:;其中,在上述技术方案中,步骤s20中对水声设备接收信号进行预处理的方法为:得到水声设备接收信号的协方差矩阵,协方差矩阵为一个m*m维的矩阵,其中m表示阵元的个数,提取其实部标记为,为一个m*m维的矩阵,提取其虚部标记为,也为一个m*m维的矩阵,之后将这两个矩阵组合成一个m*m*2维的矩阵,记为。
[0033]
其中,在统计学与概率论中,协方差矩阵是一个矩阵,其每个元素是各个向量元素之间的协方差,是从标量随机变量到高维度随机向量的自然推广。
[0034]
然后,对每一个方位训练一个网络,其输入是协方差矩阵处理后的矩阵,当有目标存在时其标签为[1,0],无目标存在时,其标签为[0,1]。所述卷积层的大小为[1,1,2]且只包含一个卷积核,无池化层,全连接层的输出为一个1*2维的向量, 第一个值表示这个方位有目标的概率,第二个值表示这个方位无目标的概率。损失函数选取交叉熵损失函数,其数学定义式在被问题中可写为下式:;
其中,分别表示真实的标签和网络的输出向量。
[0035]
激活函数采用relu函数,其数学定义式如下:;在训练时,由于对于每一个方位,在这个方位存在目标的训练集远小于未存在目标的训练集,因此需要调整每一次训练有目标的训练集和无目标的训练集的个数,通常在每一次训练时可设置为有目标训练集的个数占比为0.7或0.8,每一个网路对应的训练次数通常可设置为1000。
[0036]
其中,所述步骤“对输出结果进行概率处理并得到目标的方位”中对输出结果进行概率处理的方法为:第k个方位上的网络的输出向量为,对于第k个方位的输出,表示第k个方位出现目标的概率,表示不出现目标的概率,对输出结果中的每个方位建立目标概率向量,并重写为,之后将每一个方位对应的网络的有目标存在时的概率组合起来,并组成一个1*k维的向量为,其值表示每个方位出现目标的概率,通过每个方位出现目标概率值的大小确定在这个方位是否出现目标。如果对某一方位的结果不太满意,可重新训练该方位对应的网络,无需对所有的网络重新训练,节省了训练时间。
[0037]
其中,若概率值大于0.6则表明该方位出现目标,也可根据经验判断概率值与出现目标情况之间的关系。
[0038]
本发明第二方面提供一种计算机可读存储介质,其中,所述计算机可读存储介质存储有程序代码,用于执行上述的一种基于深度学习的水下目标方位估计方法。
[0039]
本发明第三方面提供一种基于深度学习的水下目标方位估计系统,其中,包含上述的一种计算机可读存储介质。
[0040]
现给出仿真条件和swellex-96的s-59event的各项数据,其中,图4至图7给出了本方案和其他方案的数据对比。
[0041]
(1)仿真条件假设100hz的双目标相干信号,阵元个数是20,快拍数是500,在使用mvdr和music方法时,利用双向平滑算法进行解相干。利用深度学习进行仿真时分别在-10-4db的信噪比之间每隔2db构建训练集进行训练。在不同信噪比下的训练集取,每隔一度取一个目标,假设目标处于不同的方位,则在每一种信噪比下有64980个训练集。
[0042]
方位估计示意图的信噪比为-2db,目标的方位为-15
°
和-10
°
。
[0043]
在探究信噪比对各个方法正确率的影响时,测试集的构建与训练集相似,即设置信噪比在-10-4db之间,每隔2db构建测试集。
[0044]
根据仿真的结果可以看出本发明实现了最高的分辨率,且无论在高信噪比还是在低信噪比下其性能都是较优的。
[0045]
(2)swellex-96的s-59 event简介s59-event包含一个干扰源。
[0046]
目标源船(r/v sproul)在两个水平线列阵以东方向开始运动,并以5节(2.5m/s)的速度沿着180m左右的等深线向北行驶。在此次实验的最后25min,目标源传完成一个循环。干扰源从所有阵列的西侧开始运动,向东南方向和两个hla之间前进,最后在阵列以东
停止。r/v sproul同时拖着两个源:一个深源(j-15)和一个浅源(j-13)。
[0047]
深源被拖至约54m深。它传输了49hz至400hz之间的各种源级的多种tonal set。此tonal set称为 t-49-13,如下所示:表1: t-49-13 tonal set分组;t-49-13 tonal set由5组每组13 个tonal组成。每组13 tonal跨越49hz和400hz之间的频率。第一组13 tonal预计在最高级别,并被称为"high tonal set"。这些tonal预计传输水平约为158db。第二组tonal的投影水平约为132db。后续的tonal(第三、第四和第五)分别预计比上一组下降4db。
[0048]
浅源被拖至约9m深,传输了9 个频率,称为 c-109-9s tonal set,如下所示:表2: c-109-9s tonal set分组;c-109-9s tonal set传输了109hz和 385hz之间的 9 个频率。
[0049]
基阵为27个阵元的曲线阵。 hla北阵列是部署在海底的240m长的水平阵列。从第一个元件到最后一个元件的连线相对于正北方向呈顺时针34.5
°
,阵列实际变为一个轻微的弓形(约13m)。
[0050]
从对实验数据的处理结果可以看出,本发明的分辨率是最高的,处理的耗时也低于传统的方法,利用本发明进行实际的水下doa估计是可行的。
[0051]
具体的,本发明的原理是:利用卷积神经网络,输入预处理过后的水平线列阵接收信号的协方差矩阵,训练若干个神经网络,将原来的多分类问题转化为在每一个方位上的二分类问题,对于每一个方位都单独训练一个网络,用来判断这个方位出现目标的概率值,使得其将一个复杂的问题视为很多个简单的问题。
[0052]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1