一种联合收获机割台高度实时监测装置及方法
本发明涉及农业机械领域,具体地,涉及一种联合收获机割台高度实时监测装置及方法。
背景技术:
1、当前随着农业机械化的不断普及,联合收获机作为一种重要的农业机械设备在谷物收获中得到了越来与越广泛的应用。其中割台作为联合收获机的关键部件,为了提高谷物收获质量,在收获过程中需要对割台高度进行实时监测并将其显示出来。目前的割台高度监测方法为在控制割台升降的液压油缸上布置拉线传感器或推杆传感器,经过计算,反应出割台的离地高度。这种监测方法的缺陷在于传感器安装在液压缸上并不能直观的反应割台的离地高度,且对于不同厂家的油缸在零位时,与水平面的角度不同,计算割台高度时的比例参数不同,因此需要进行割台初始位置的标定和校对,该过程存在人为误差且操作较为繁琐,同时传感器布置在液压缸附近容易损坏。
2、因此,一种直观可靠,实时性好的联合收获机割台高度监测装置及方法是目前市场所迫切需要的,该装置和方法需能实时监测并显示割台离地高度,以便驾驶员观测和调控。
技术实现思路
1、本发明的目的就在于为了克服上述问题或至少部分解决上述问题而提供一种直观可靠,实时性强的联合收获机割台高度监测装置及方法。
2、本发明通过以下技术方案来实现上述目的。
3、一种联合收获机割台高度实时监测装置,该装置包括:地面高度变化感知模块,应变信号采集模块,数据处理模块,数据显示模块:其中,
4、所述地面高度变化感知模块包括柔性仿形臂,用于实时感知地面的高度变化并产生相应的形变;
5、所述应变信号采集模块包括电阻应变片传感器,用于实时采集柔性仿形臂特定部位的应变信号;
6、所述数据处理模块包括plc控制器,用于对设定割台目标高度值,接收数据采集模块采集的应变信号作分析计算处理,得到割台实时高度值及割台高度变化值,并将这三个值传递至数据显示模块;
7、所述数据显示模块与数据处理模块之间通信,接收数据处理模块传递来的割台目标高度值,割台实时高度值,割台高度变化值,并将这三个值通过显示器实时显示出来供驾驶员查看。
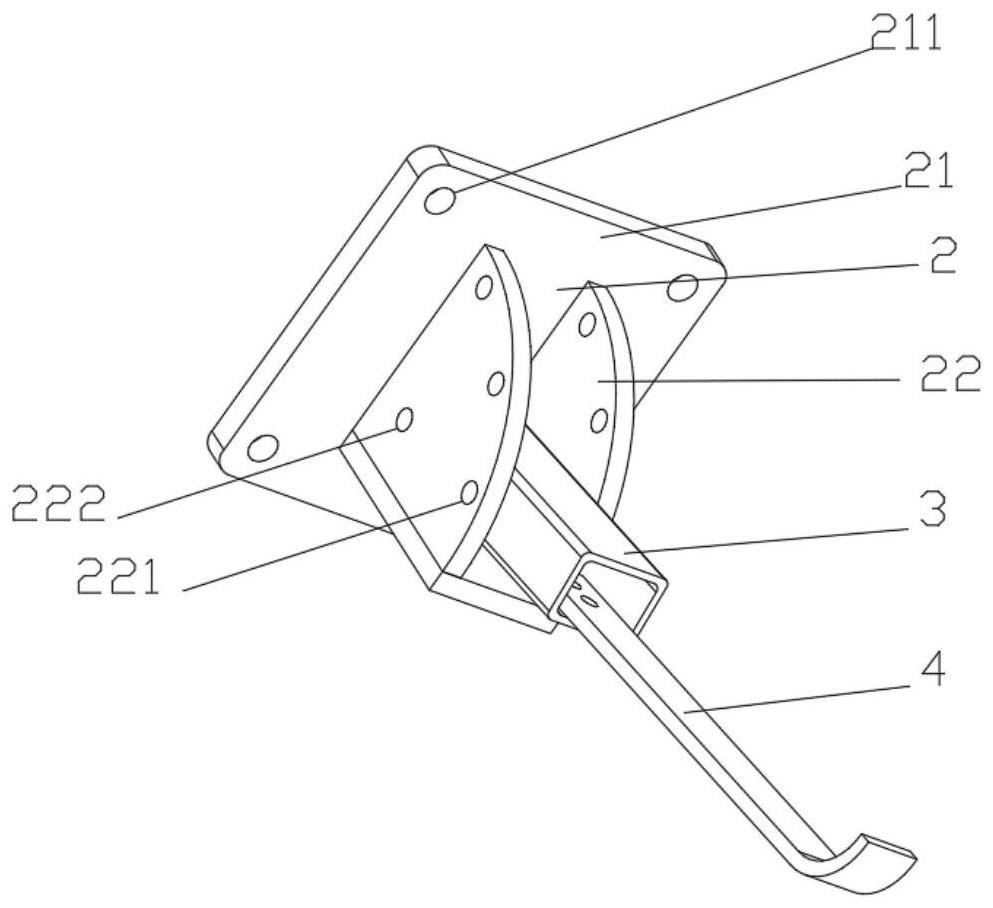
8、进一步的,所述的一种联合收获机割台割台高度实时监测装置,所述柔性仿形臂固定端固定在安装基座上,所述安装基座包括连接底板,角度调节支座。
9、进一步的,所述的一种联合收获机割台高度实时监测装置,所述角度调节支座包括调节孔阵及安装孔,所述连接臂一端与所述角度调节支座固定角度连接,连接臂另一端与所述柔性仿形臂固定连接,其中所述固定角度为可调角度,通过调节连接臂安装孔在角度调节支座中的不同安装位置进行安装角度调节。
10、进一步的,所述的一种联合收获机割台高度实时监测装置,其中所述数据处理模块与数据显示模块,均安装在驾驶室内。
11、一种联合收获机割台高度实时监测方法,包括以下步骤:
12、s1地面高度变化感知模块感知地面的高低起伏变化,将地面高度变化信号实时转变为柔性仿形臂特定部位的应变信号;
13、s2应变信号采集模块采集柔性仿形臂特定部位的应变信号,将应变信号实时传递至数据处理模块;
14、s3数据处理模块计算处理应变信号,根据所述柔性仿形臂特定部位的应变信号与柔性仿形臂触地端挠度变化值之间的实验标定关系实时得到仿形臂触地端的挠度变化值。根据所述柔性仿形臂触地端的挠度变化值与割台的高度变化值的定量关系可进一步得到割台的实时高度值;
15、s4数据显示模块与数据处理模块之间通信,将割台实时高度通过显示模块直观的显示出来。
16、进一步的,所述的联合收获机割台高度实时监测方法,所述步骤s1中地面高度变化感知模块包括所述柔性仿形臂,所述柔性仿形臂触地端与地面始终保持接触,通过所述柔性仿形臂特定部位的形变来响应地面高度变化;其中所述柔性仿形臂的特定部位与柔性仿形臂固定端的距离可调,所述柔性仿形臂固定端通过安装基座固定在割台上。
17、进一步的,所述的联合收获机割台高度实时监测方法,所述步骤s2中应变信号采集模块通过电阻应变片式传感器采集所述柔性仿形臂的特定部位的应变信息。
18、进一步的,所述的联合收获机割台高度实时监测方法,所述步骤s3中,包括:
19、第一步:通过实验标定所述柔性仿形臂的特定部位的应变信号与所述柔性仿形臂触地端的挠度值之间的关系;
20、通过如下公式表征所述标定关系:
21、wb=f(εx);
22、其中wb为所述柔性仿形臂触地端的挠度值,εx为所述柔性仿形臂特定部位的应变;
23、第二步:基于柔性仿形臂的特定部位的应变信号与所述柔性仿形臂触地端的挠度值之间的标定关系分别计算设定割台目标高度处对应的柔性仿形臂触地端的挠度值,以及处于收割作业过程中某一时刻的柔性仿形臂触地端挠度值,通过所述数据处理模块计算处理得到柔性仿形臂触地端的挠度变化值;
24、通过如下公式表征所述柔性仿形臂触地端挠度变化值:
25、wb0=f(εx0);
26、wbt=f(εxt);
27、δw=wbt-wb0;
28、其中εx0表示设定割台目标高度处对应柔性仿形臂的特定部位处的应变值,εxt表示收割作业过程中某一时刻柔性仿形臂特定部位处的应变值,δw为所述柔性仿形臂触地端挠度变化值,wbt为工作状态中某一时刻柔性仿形臂触地端挠度值,wb0为设定割台目标高度处对应的仿形臂触地端的挠度值;
29、第三步:所述柔性仿形臂触地端的挠度变化值与割台的高度变化值的定量关系基于所述柔性仿形臂触地端挠度变化值以及所述柔性仿形臂固定端在竖直方向的安装角的正弦值确定;
30、通过如下公式表征所述定量关系:
31、
32、δh=δh;
33、其中,δh为柔性仿形臂在竖直方向的高度变化值,δw为所述柔性仿形臂触地端挠度变化值,为所述柔性仿形臂固定端在竖直方向安装角的正弦值,δh为割台在竖直方向的离地高度变化值。
34、本发明的有益效果在于:
35、1、本发明的地面高度变化感知模块通过柔性仿形臂的形变实时的感知地面高度变化,经过计算处理可以直接得到割台离地高度变化,避免了以往使用在割台油缸附件布置拉线传感器间接测量割台离地高度时需要标定校对割台初始位置的繁琐步骤及产生的误差。
36、2、本发明通过设置数据显示模块,将目标割台高度、割台实时高度,割台高度变化值直观清晰的显示出来,为驾驶员对割台高度的调控提供参考。
37、3、本发明包括了一种可调角度的柔性仿形臂安装基座,可根据实际作业时的不同作物或割台要求的割台离地高度,选取合适的柔性仿形臂安装角度,而不必更换不同长度的仿形臂,能满足各类作物的收割要求,因此可以将本发明广泛应用于各类需要测定割台高度的收割机上,市场前景广阔。
技术特征:
1.一种联合收获机割台高度实时监测装置,其特征在于,该装置包括:地面高度变化感知模块,应变信号采集模块,数据处理模块,数据显示模块:其中,
2.根据权利要求1所述的一种联合收获机割台高度实时监测装置,其特征在于,所述柔性仿形臂固定端通过连接臂固定在安装基座上,安装基座固定安装在割台上,所述安装基座包括连接底板,角度调节支座。
3.根据权利要求2所述的一种收割机割台高度实时监测装置,其特征在于,所述角度调节支座包括调节孔阵及安装孔,所述连接臂一端与所述角度调节支座固定角度连接,连接臂另一端与所述柔性仿形臂固定连接,其中所述固定角度为可调角度,通过调节连接臂安装孔在角度调节支座中的不同安装位置进行安装角度调节。
4.根据权利要求1所述的一种联合收获机割台高度实时监测装置,其特征在于,其中所述数据处理模块与数据显示模块,均安装在驾驶室内。
5.一种联合收获机割台高度实时监测方法,其特征在于,包括以下步骤:
6.根据权利要求5所述的一种联合收获机割台高度实时监测方法,其特征在于,所述步骤s1中地面高度变化感知模块包括所述柔性仿形臂,所述柔性仿形臂触地端与地面始终保持接触,通过所述柔性仿形臂特定部位的形变来响应地面高度变化;其中所述柔性仿形臂的特定部位与柔性仿形臂固定端的距离可调,所述柔性仿形臂固定端通过连接臂固定在安装基座上。
7.根据权利要求5所述的一种联合收获机割台高度实时监测方法,其特征在于,所述步骤s2中应变信号采集模块通过电阻应变片式传感器采集所述特定部位的应变信息。
8.根据权利要求5所述的一种联合收获机割台高度实时监测方法,其特征在于,所述步骤s3中,包括:
9.根据权利要求5所述的一种联合收获机割台高度实时监测方法,其特征在于,所述步骤s4中割台目标离地高度通过所述步骤s3中的数据处理模块设定。
技术总结
本发明公开了一种联合收获机割台高度实时监测装置及方法。首先利用地面高度变化感知模块感知地面的高度变化,将地面高度变化信号实时转变为柔性仿形臂特定部位的应变信号,随后利用应变信号采集模块采集所述应变信号并将其实时传递至数据处理模块,接着所述数据处理模块对应变信号进行计算处理得到柔性仿形臂触地端的挠度变化值,基于所述触地端挠度变化值与割台的高度变化值之间的定量关系可得到割台的实时高度值,最后数据显示模块与所述数据处理模块之间通信,将割台实时高度通过显示模块直观的显示出来,方便驾驶员观测和调控,本发明克服了现有技术中在割台油缸附近布置拉线传感器间接获取割台高度过程中实时性不足且精度不高的缺陷。
技术研发人员:黄毅,周涛,任子誉,邓磊,舒勤,汤麒英,郭金梦,胡明
受保护的技术使用者:长沙理工大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!