复杂环境下的基于人工势场法的星凸形扩展目标跟踪方法
本发明涉及复杂环境下的扩展目标跟踪,特别是涉及复杂环境下的基于人工势场法的星凸形扩展目标跟踪方法。
背景技术:
1、目标跟踪技术是基于雷达检测到的量测信息,连续确定动态目标状态的过程。该技术在军事和民用领域一直都有广泛应用,且伴随着跟踪环境的日益复杂和传感器技术的高速发展对跟踪系统提出了更高的要求。传统目标跟踪算法是基于点目标模型的,即假定目标是一个没有任何空间范围扩展的点,且量测只源于目标的质心。随着高分辨率传感器在目标跟踪领域的广泛应用,一个目标在每个采样周期内可以产生多个量测,称这样的目标为扩展目标(extended target,et),其对应的跟踪问题为扩展目标跟踪(extendedtarget tracking,ett)。不同于传统的点目标跟踪,ett可以从量测集中提取目标的形状信息,进而对目标的状态信息进行更深层次的估计。要解决每个采样时刻单个目标产生多个量测的问题,对跟踪技术提出了更高的要求。对于ett的需求不仅局限于对目标所处位置、相关运动参数等状态信息的估计,而且在获取以上信息的同时还希望能够获取目标扩展形状、范围等具体信息,从而能够更全面的认知目标、识别目标。因此不仅要对目标进行跟踪,同时还要估计其形状。即在对目标精确定位的基础上,对目标的形状和大小进行准确的跟踪估计。目前比较常见的星凸形扩展目标形状建模有两种:一种是baum等人提出的随机超曲面模型(random hypersurface model,rhm)。rhm假设每个量测源都是一个随机生成的超曲面上的一个元素,使用径向函数来表示量测源距离中心的距离。当量测源在目标的边界上时,通常可以制定一个量测方程,通过一个随机尺度因子,将边界的量测方程缩放覆盖至整个目标表面。因为rhm是通过利用傅里叶级数描述的径向函数对量测源建模,进而将目标的形状参数化,使目标的所有参数(包括运动参数以及形状参数)均包含在一个随机向量中进而递归估计目标的运动学状态以及形状参数。可见跟踪扩展目标是一个高度复杂的非线性问题。rhm模型应用傅里叶级数处理径向函数,傅里叶级数的低频谐波描述形状的粗略轮廓,高频谐波描述形状的细节轮廓,所以傅里叶级数展开级数较少时目标形状较为粗糙。为了表示出更为精确的目标形状,傅里叶级数需要展开足够多。目标量测通过高阶傅里叶级数进行处理也导致运算复杂度的增加。另一种是高斯过程(gaussian process,gp)模型。gp是一个将输入映射到输出空间的随机过程。即在一个随机过程中,任意两个或多个随机变量服从多元高斯分布,这个随机过程被称为高斯过程。gp模型在rhm基础上通过高斯过程回归(gaussian process regression,gpr)学习目标形状的径向函数,从而完成对星凸形扩展目标的建模。即用高斯过程解决星凸形扩展目标跟踪仍然用径向函数描述星凸形目标轮廓,并同样使用尺度因子对目标轮廓缩放,从而对扩展目标的量测源进行建模。gpr是一个非参数模型,它通过gp为模型赋予了更多不确定性。虽然gp较为复杂,但是用于回归时计算简单。非参数模型让gpr能够建模任意函数,核函数使得gpr能利用数据的内在结构。gp模型是在空间域而不是在频域内定义的,这使得局部学习目标轮廓。换句话说,在学习目标范围内可观察到的部分时,可以保持未观察到的部分的不确定性,从而为以后的观察提供更准确的门限。但存在无法精确地刻画目标细节部分的问题。因此,如何通过科学地形状建模,提高扩展目标形状的自适应跟踪效果就变得非常重要。
技术实现思路
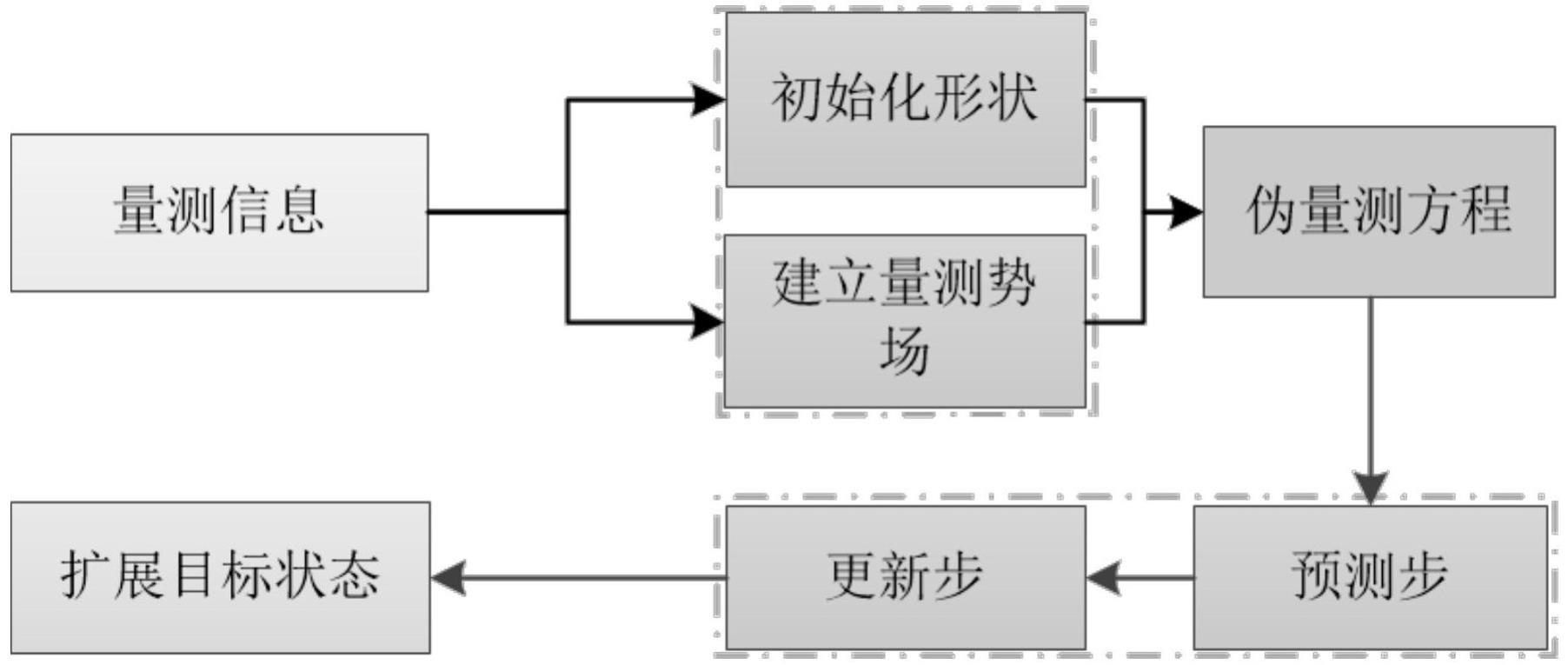
1、本发明的目的是提供了复杂环境下的基于人工势场法的星凸型扩展目标跟踪方法,避免了传统方法粗糙地刻画目标轮廓细节,通过逐步引入量测势场进而得到伪量测模型,用于提高扩展目标的跟踪精度。
2、为实现上述目的,本发明提供了如下方案:
3、复杂环境下的基于人工势场法的星凸形扩展目标跟踪方法,包括:
4、采集目标量测信息,通过所述目标量测信息,建立量测模型;
5、初始化星凸型扩展目标状态,通过模仿人工势场法建立所述星凸形扩展目标的量测势场,基于所述量测模型、初始化后的星凸型扩展目标状态以及所述量测势场,推导出伪量测模型;
6、根据所述伪量测模型对所述目标状态进行预测的同时,对预测结果进行更新与优化,获取状态向量,完成扩展目标跟踪。
7、可选地,建立所述量测模型包括:
8、设定采集时刻,通过所述采集时刻,采集若干个所述目标量测信息,所述目标量测信息包括:目标方位;
9、基于若干个所述目标量测信息,构建量测集,根据所述量测集,建立所述量测模型;
10、所述量测模型包括:
11、yk,l=zk,l+vk,l
12、其中,zk,l为量测源,vk,l为量测噪声。
13、可选地,所述初始化星凸型扩展目标状态包括:
14、预设初始时刻目标的运动状态,通过所述运动状态,初始化所述星凸型扩展目标状态;
15、初始化所述星凸型扩展目标状态的方法为:
16、
17、其中,xk为扩展目标状态,为目标的运动状态,为扩展状态,t为转置符号。
18、可选地,获取所述扩展状态的方法为:
19、通过中心轮廓距离方法提取所述目标量测信息,获取初始轮廓点,将所述初始轮廓点作为控制顶点,获取均匀b样条曲线,基于所述均匀b样条曲线描述扩展状态;
20、所述均匀b样条曲线包括:
21、
22、
23、其中,u为节点向量,当i=ns时,ei+1=e1,ns为控制顶点个数。
24、可选地,通过模仿人工势场法建立所述星凸形扩展目标的量测势场包括:
25、基于传统的人工势场法,设计虚拟复合场,所述传统的人工势场法包括引力场和斥力场,通过模拟移动物体在所述虚拟复合场中运动,并模拟目标对所述移动物体产生引力作用,以及障碍物对所述移动物体产生斥力作用,建立所述星凸形扩展目标的量测势场。
26、可选地,基于所述量测模型、初始化后的星凸型扩展目标状态以及所述量测势场,推导出伪量测模型包括:
27、通过所述量测势场判断所述量测模型的受力情况,当所述量测模型位于估计形状外,则所述量测模型只受引力作用,当所述量测模型位于估计形状内,则所述量测模型受引力和斥力共同作用;
28、将初始化后的星凸型扩展目标状态、量测噪声、尺度因子和判断后的所述量测模型映射到同一函数上,建立伪量测函数,并以均匀b样条曲线所获取的轮廓点为初始点,通过rhm的缩放形状轮廓的思想,推导出伪量测模型;
29、所述伪量测模型包括:
30、
31、其中,yk,l为量测,vk,l为量测噪声,sk,l为尺度因子,ne表示迭代次数,为第ne次迭代的移动位置,h为伪量测方程。
32、可选地,通过所述量测势场判断所述量测模型的受力情况的方法为:
33、
34、其中,fk,l(yk,l)为引力和斥力合力,为引力势场函数的负梯度,为斥力势场函数的负梯度,为估计形状,yk,l为量测模型。
35、可选地,根据所述伪量测模型对所述目标状态进行预测的同时,对预测结果进行更新与优化,获取目标形状参数包括:
36、根据所述伪量测模型对所述目标状态进行预测,获取预测联合概率密度,基于所述预测联合概率密度更新所述目标状态,并通过容积卡尔曼滤波优化预测联合概率密度,获取所述状态向量;
37、其中,所述容积卡尔曼滤波包括:预测步和更新步。
38、可选地,通过容积卡尔曼滤波优化预测联合概率密度包括:
39、获取历史扩展目标的状态向量和先验协方差矩阵,通过所述历史扩展目标的状态向量和先验协方差矩阵,预测扩展目标的状态向量和协方差矩阵;
40、所述扩展目标的状态向量包括:
41、xk|k-1=axk-1|k-1
42、其中,xk|k-1为k时刻预测扩展目标的状态向量,a为状态转移矩阵,xk-1|k-1为k-1时刻扩展目标的状态向量;
43、所述协方差矩阵包括:
44、pk|k-1=apk-1|k-1at+q
45、其中,pk|k-1为协方差矩阵,a为状态转移矩阵,pk-1|k-1为先验协方差矩阵,t为转置符号,q为过程噪声协方差。
46、可选地,通过容积卡尔曼滤波优化预测联合概率密度还包括:
47、获取容积点,通过所述容积点,获取卡尔曼增益矩阵,计算所述卡尔曼增益矩阵,更新所述扩展目标的状态向量和协方差矩阵;
48、所述容积点包括:
49、
50、其中,为基本容积点,h为伪量测方程;
51、计算所述卡尔曼增益矩阵,更新所述扩展目标的状态向量和协方差矩阵的方法为:
52、
53、
54、
55、
56、
57、
58、其中,znz为均值,nc为为扩展目标状态维数的2倍,为传播后的容积点,pxz为互协方差,为基本容积点,t为矩阵转置符号,xk|k-1为先验状态,pzz为自协方差,kk为卡尔曼增益矩阵,为自协方差的逆矩阵,xk|k为后验状态,kk为卡尔曼,pk|k为后验协方差,pk|k-1为先验协方差,kk为卡尔曼增益矩阵,为卡尔曼增益矩阵的转置。
59、本发明的有益效果为:
60、与现有技术相比,本发明的有益效果:提出基于人工势场法的星凸形扩展目标跟踪算法。在该算法中,利用人工势场法对量测信息进行势场的建立,颇为有效地解决了目标形状轮廓细节描述的问题。所提方法的意义在于,提出的建模方式能更精确的刻画现代目标跟踪系统所面临的复杂环境。
- 还没有人留言评论。精彩留言会获得点赞!