可行驶区域的确定方法、装置、电子设备和存储介质与流程
本公开涉及辅助驾驶技术,尤其是一种可行驶区域的确定方法、装置、电子设备和存储介质。
背景技术:
1、在实现本公开的过程中,发明人发现,可行驶区域(free space)检测是智能泊车辅助驾驶系统中的重要环节,可行驶区域检测是对车辆周围的障碍物以及可行驶区域进行识别,以用于泊车阶段的路径规划与控制。相关技术中,通常基于环视摄像头采集车辆周围环境图像,进行可行驶区域检测,但是环视摄像头对于近距离障碍物测距精度较差、且存在视野盲区等问题,导致可行驶区域的检测精度较低。
技术实现思路
1、为了解决上述可行驶区域检测精度较低等技术问题,本公开的实施例提供了一种可行驶区域的确定方法、装置、电子设备和存储介质,以提高可行驶区域的准确性、可靠性和检测精度。
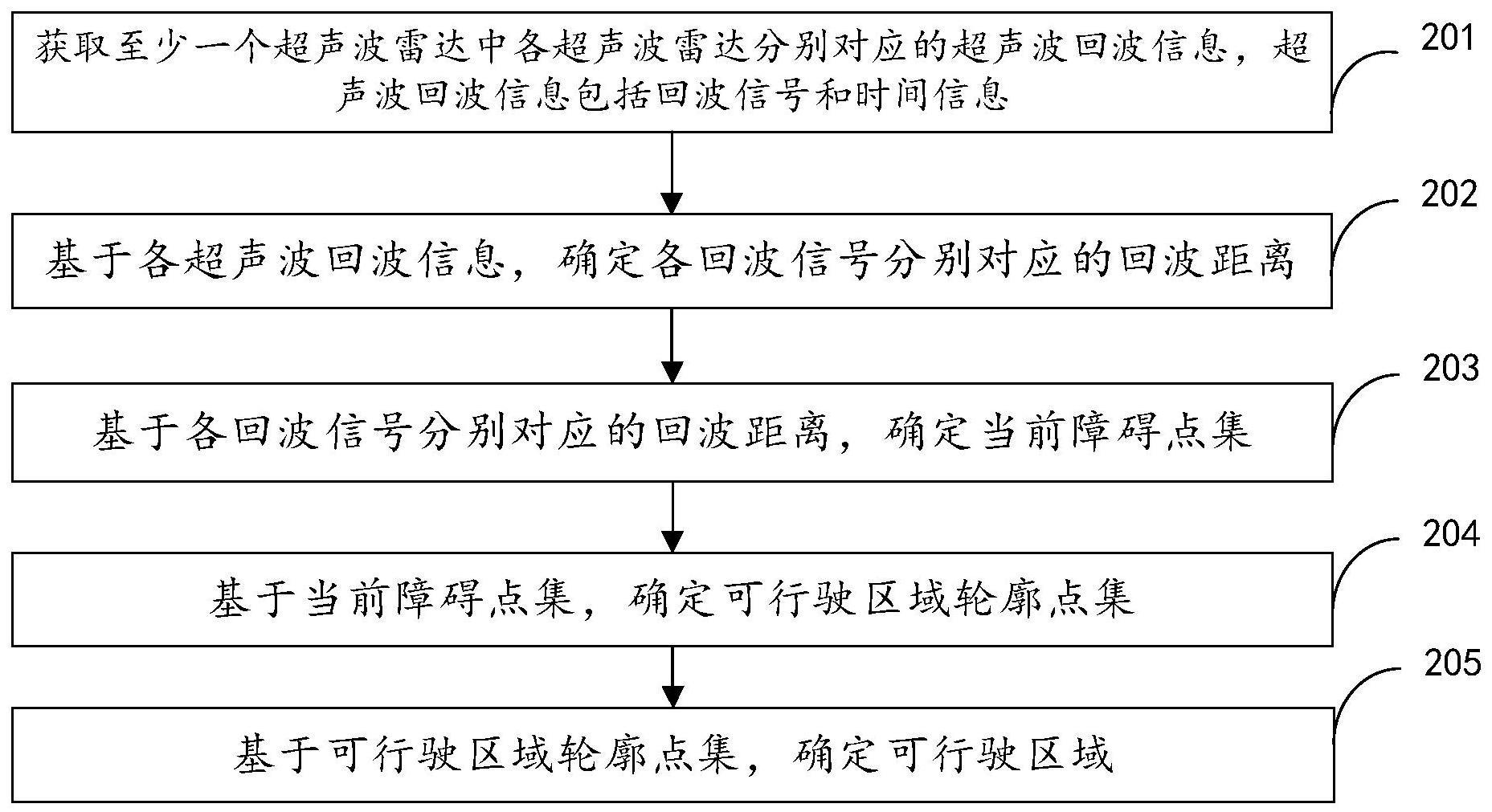
2、本公开的第一个方面,提供了一种可行驶区域的确定方法,包括:获取至少一个超声波雷达中各所述超声波雷达分别对应的超声波回波信息,所述超声波回波信息包括回波信号和时间信息;基于各所述超声波回波信息,确定各所述回波信号分别对应的回波距离;基于各所述回波信号分别对应的所述回波距离,确定当前障碍点集;基于所述当前障碍点集,确定可行驶区域轮廓点集;基于所述可行驶区域轮廓点集,确定可行驶区域。
3、本公开的第二个方面,提供了一种可行驶区域的确定装置,包括:第一获取模块,用于获取至少一个超声波雷达中各所述超声波雷达分别对应的超声波回波信息,所述超声波回波信息包括回波信号和时间信息;第一处理模块,用于基于各所述超声波回波信息,确定各所述回波信号分别对应的回波距离;第二处理模块,用于基于各所述回波信号分别对应的所述回波距离,确定当前障碍点集;第三处理模块,用于基于所述当前障碍点集,确定可行驶区域轮廓点集;第四处理模块,用于基于所述可行驶区域轮廓点集,确定可行驶区域。
4、本公开的第三个方面,提供一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序用于执行本公开上述任一实施例所述的可行驶区域的确定方法。
5、本公开的第四个方面,提供一种电子设备,所述电子设备包括:处理器;用于存储所述处理器可执行指令的存储器;所述处理器,用于从所述存储器中读取所述可执行指令,并执行所述指令以实现本公开上述任一实施例所述的可行驶区域的确定方法。
6、本公开的第五个方面,提供一种计算机程序产品,当所述计算机程序产品中的指令被处理器执行时,执行本公开上述任一实施例所述的可行驶区域的确定方法。
7、基于本公开上述实施例提供的可行驶区域的确定方法、装置、电子设备和存储介质,基于超声波雷达的超声波回波信息确定当前障碍点集,由于超声波回波信息包括原始的回波信号和时间信息,原始回波信号可以包括相邻超声波雷达重叠区域的障碍点的回波信号以及非重叠区域的障碍点的回波信号,因此可以兼顾相邻超声波雷达的重叠区域的障碍点以及非重叠区域的障碍点,提高当前障碍点集的有效性,进而基于当前障碍点集的分布特性确定可行驶区域轮廓点集,可以提高可行驶区域轮廓点集的准确性,进而提高基于可行驶区域轮廓点集确定出的可行驶区域的准确性和可靠性,实现了基于超声波雷达的可行驶区域的准确可靠检测,并且,由于超声波雷达近距离范围内测距能力强,受光线、雨雾等环境影响小,从而可以有效提高近距离可行驶区域的检测精度,解决环视摄像头近距离检测精度较低等问题。
技术特征:
1.一种可行驶区域的确定方法,包括:
2.根据权利要求1所述的方法,其中,所述基于各所述回波信号分别对应的所述回波距离,确定当前障碍点集,包括:
3.根据权利要求2所述的方法,其中,所述基于属于同一障碍点的所述回波距离组,确定所述回波距离组对应的第一障碍点,包括:
4.根据权利要求2所述的方法,其中,所述基于各所述回波距离中除所述回波距离组之外的第三回波距离,确定所述第三回波距离对应的第二障碍点,包括:
5.根据权利要求1所述方法,其中,所述基于所述当前障碍点集,确定可行驶区域轮廓点集,包括:
6.根据权利要求5所述的方法,其中,所述基于各所述目标障碍物分别对应的第一点集,确定所述可行驶区域轮廓点集,包括:
7.根据权利要求6所述的方法,还包括:
8.根据权利要求7所述的方法,其中,所述第一轮廓点集对应的标签为第一类型;所述第二轮廓点集对应的标签为第二类型;所述第三轮廓点集对应的标签为第一类型;
9.根据权利要求1所述的方法,其中,在所述基于所述当前障碍点集,确定可行驶区域轮廓点集之后,还包括:
10.根据权利要求9所述的方法,其中,所述基于所述可行驶区域轮廓点集,对在前获得的超声波栅格地图进行更新,获得更新后的超声波栅格地图,包括:
11.一种可行驶区域的确定装置,包括:
12.一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序用于执行上述权利要求1-10任一所述的可行驶区域的确定方法。
13.一种电子设备,所述电子设备包括:
技术总结
本公开实施例公开了一种可行驶区域的确定方法、装置、电子设备和存储介质,其中,方法包括:获取至少一个超声波雷达中各超声波雷达分别对应的超声波回波信息,超声波回波信息包括回波信号和时间信息;基于各超声波回波信息,确定各回波信号分别对应的回波距离;基于各回波信号分别对应的回波距离,确定当前障碍点集;基于当前障碍点集,确定可行驶区域轮廓点集;基于可行驶区域轮廓点集,确定可行驶区域。本公开实施例提高了基于超声波雷达的可行驶区域检测的准确性和可靠性,且由于超声波雷达近距离范围内测距能力强,受光线、雨雾等环境影响小,从而可以有效提高近距离可行驶区域的检测精度,解决环视摄像头近距离检测精度较低等问题。
技术研发人员:勾鹏琪,冉友廷,吴高强,徐鹏,陈广昊,潘铭星
受保护的技术使用者:上海安亭地平线智能交通技术有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!