在规划器中生成校正后的未来机动动作参数的制作方法
本公开涉及运载工具,尤其涉及生成校正后的未来机动动作参数。
背景技术:
1、自主运载工具能够感测其周围环境并在没有人类输入的情况下进行导航。运载工具在接收到表示环境的数据和/或任意其他参数时,进行该数据的处理以确定该运载工具的移动决策(例如,停止、向前/向后移动、转弯等)。这些决策旨在沿着所选择的路径安全地导航运载工具,以避开障碍物并对各种情景(诸如其他运载工具、行人和/或任意其他对象的存在、移动等)做出反应。
技术实现思路
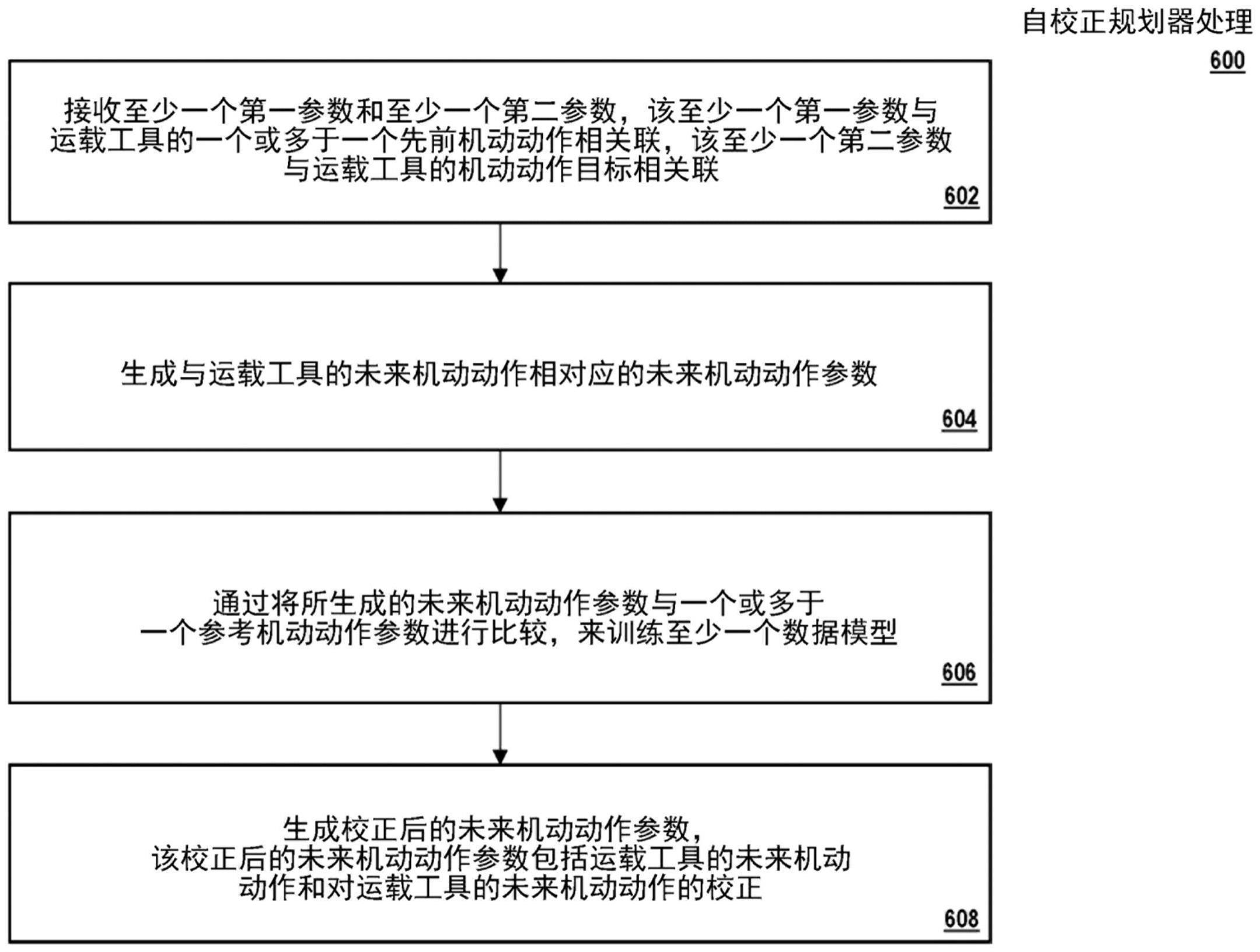
1、根据本发明的一方面,提供一种方法,其包括:使用至少一个处理器,接收第一参数集和第二参数集,所述第一参数集与运载工具的一个或多于一个先前机动动作相关联,所述第二参数集与所述运载工具的机动动作目标相关联;使用所述至少一个处理器,使用所述第一参数集和所述第二参数集来生成与所述运载工具的至少一个未来机动动作相对应的至少一个未来机动动作参数;使用所述至少一个处理器,通过将所述至少一个未来机动动作参数与被识别为专家驾驶员机动动作参数的一个或多于一个参考机动动作参数进行比较来训练至少一个数据模型;使用所述至少一个处理器,基于所述训练来生成至少一个校正后的未来机动动作参数,所述校正后的未来机动动作参数包括所述运载工具的至少一个未来机动动作、以及基于误差校正值对所述运载工具的至少一个未来机动动作的至少一个校正,所述误差校正值指示所述至少一个未来机动动作参数和所述一个或多于一个参考机动动作参数之间的差;使用所述至少一个处理器,使用所述至少一个校正后的未来机动动作参数来生成用于控制所述运载工具执行所述至少一个校正后的未来机动动作的信号;以及使用所述信号来使所述运载工具至少部分地基于所述校正后的未来机动动作参数进行操作。
2、根据本发明的另一方面,提供一种系统,其包括:至少一个处理器,以及至少一个非暂态存储介质,其存储有指令,所述指令在由所述至少一个处理器执行时,使得所述至少一个处理器进行操作,所述操作包括:接收第一参数集和第二参数集,所述第一参数集与运载工具的一个或多于一个先前机动动作相关联,所述第二参数集与所述运载工具的机动动作目标相关联;使用所述第一参数集和所述第二参数集来生成与所述运载工具的至少一个未来机动动作相对应的至少一个未来机动动作参数;通过将所述至少一个未来机动动作参数与被识别为专家驾驶员机动动作参数的一个或多于一个参考机动动作参数进行比较来训练至少一个数据模型;基于所述训练来生成至少一个校正后的未来机动动作参数,所述校正后的未来机动动作参数包括所述运载工具的至少一个未来机动动作、以及基于误差校正值对所述运载工具的至少一个未来机动动作的至少一个校正,所述误差校正值指示所述至少一个未来机动动作参数和所述一个或多于一个参考机动动作参数之间的差;使用至少一个校正后的未来机动动作参数来生成用于控制所述运载工具执行至少一个校正后的未来机动动作的信号;以及使用所述信号来使所述运载工具至少部分地基于所述校正后的未来机动动作参数进行操作。
3、根据本发明的又一方面,提供一种非暂态存储介质,其存储有指令,所述指令在由至少一个处理器执行时,使得所述至少一个处理器进行操作,所述操作包括:接收第一参数集和第二参数集,所述第一参数集与运载工具的一个或多于一个先前机动动作相关联,所述第二参数集与所述运载工具的机动动作目标相关联;使用所述第一参数集和所述第二参数集来生成与所述运载工具的至少一个未来机动动作相对应的至少一个未来机动动作参数;通过将所述至少一个未来机动动作参数与被识别为专家驾驶员机动动作参数的一个或多于一个参考机动动作参数进行比较来训练至少一个数据模型;基于所述训练来生成至少一个校正后的未来机动动作参数,所述校正后的未来机动动作参数包括所述运载工具的至少一个未来机动动作、以及基于误差校正值对所述运载工具的至少一个未来机动动作的至少一个校正,所述误差校正值指示所述至少一个未来机动动作参数和所述一个或多于一个参考机动动作参数之间的差;使用至少一个校正后的未来机动动作参数来生成用于控制所述运载工具执行至少一个校正后的未来机动动作的信号;以及使用所述信号来使所述运载工具至少部分地基于所述校正后的未来机动动作参数进行操作。
技术特征:
1.一种方法,包括:
2.根据权利要求1所述的方法,还包括:使用所述至少一个处理器,执行校正后的所述运载工具的至少一个未来机动动作。
3.根据权利要求1所述的方法,其中,接收还包括:使用所述至少一个处理器,在各个执行之后连续接收所述至少一个校正后的未来机动动作参数,以校正所述第一参数集中的先前接收到的一个或多于一个第一参数。
4.根据权利要求3所述的方法,还包括:接收与所述运载工具的状态相关联的至少一个第三参数;
5.根据权利要求3所述的方法,还包括:
6.根据权利要求5所述的方法,其中,所述第一参数集和所述第二参数集对应于与所述运载工具的至少一个机动动作相关联的至少一个特征。
7.根据权利要求6所述的方法,还包括:将所述至少一个特征光栅化为至少一个光栅化特征。
8.根据权利要求7所述的方法,其中,所述训练还包括:使用所述至少一个处理器,使用所述至少一个光栅化特征来训练所述至少一个数据模型。
9.根据权利要求2所述的方法,其中,所述执行还包括:
10.根据权利要求1所述的方法,其中,所述第一参数集和所述第二参数集包括以下项其中至少之一:所述运载工具的速率、位置、加速度、移动方向及其任意组合。
11.根据权利要求1所述的方法,其中,所述第一参数集中的所接收到的至少一个第一参数相对于以下项其中至少之一可微:所述第一参数集中的先前接收到的至少一个第一参数、以及至少一个校正后的第一参数。
12.根据权利要求1所述的方法,其中,专家驾驶员机动动作参数与以下项其中至少之一相关联:与所述运载工具的至少一个机动动作相关联的至少一个参考特征、以及所述一个或多于一个参考机动动作参数中的至少一个参考机动动作参数。
13.一种系统,包括:
14.根据权利要求13所述的系统,其中,所述操作还包括:执行校正后的所述运载工具的至少一个未来机动动作。
15.根据权利要求13所述的系统,其中,接收还包括:在各个执行之后连续接收所述至少一个校正后的未来机动动作参数,以校正所述第一参数集中的先前接收到的一个或多于一个第一参数。
16.根据权利要求15所述的系统,其中,所述操作还包括:接收与所述运载工具的状态相关联的至少一个第三参数;
17.根据权利要求13所述的系统,其中,所述第一参数集和所述第二参数集对应于与所述运载工具的至少一个机动动作相关联的至少一个特征。
18.根据权利要求17所述的系统,其中,所述操作还包括:将所述至少一个特征光栅化为至少一个光栅化特征。
19.根据权利要求18所述的系统,其中,训练还包括:使用所述至少一个光栅化特征来训练所述至少一个数据模型。
20.根据权利要求14所述的系统,其中,执行还包括:
21.根据权利要求13所述的系统,其中,所述第一参数集和至少一个所述第二参数集包括以下项其中至少之一:所述运载工具的速率、位置、加速度、移动方向及其任意组合。
22.根据权利要求13所述的系统,其中,所述第一参数集中的所接收到的至少一个第一参数相对于以下项其中至少之一可微:所述第一参数集中的先前接收到的至少一个第一参数、以及至少一个校正后的第一参数。
23.根据权利要求13所述的系统,其中,专家驾驶员机动动作参数与以下项其中至少之一相关联:与所述运载工具的至少一个机动动作相关联的至少一个参考特征、以及所述一个或多于一个参考机动动作参数中的至少一个参考机动动作参数。
24.一种非暂态存储介质,其存储有指令,所述指令在由至少一个处理器执行时,使得所述至少一个处理器进行操作,所述操作包括:
25.根据权利要求24所述的非暂态存储介质,其中,所述操作还包括:执行校正后的所述运载工具的至少一个未来机动动作。
26.根据权利要求24所述的非暂态存储介质,其中,接收还包括:在各个执行之后连续接收所述至少一个校正后的未来机动动作参数,以校正所述第一参数集中的先前接收到的一个或多于一个第一参数。
技术总结
本公开涉及在规划器中生成校正后的未来机动动作参数。提供了用于在规划器中生成未来机动动作参数的方法,该方法包括:接收与运载工具的一个或多于一个先前机动动作相关联的至少一个第一参数集以及与运载工具的机动动作目标相关联的至少一个第二参数集;使用第一参数集和第二参数集生成与运载工具的未来机动动作相对应的未来机动动作参数;通过将所生成的未来机动动作参数与一个或多于一个参考机动动作参数进行比较来训练至少一个数据模型;基于训练来生成校正后的未来机动动作参数。校正后的未来机动动作参数包括运载工具的未来机动动作以及对运载工具的未来机动动作的校正。
技术研发人员:C·迪克乐,S·奥马里,李南翔,李祥旭,E·沃尔夫
受保护的技术使用者:动态AD有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!