一种无人收获机协同卸粮路径规划与自主作业方法与流程
本发明涉及卸粮转运,更具体地说,涉及一种无人收获机协同卸粮路径规划与自主作业方法。
背景技术:
1、目前我国粮食产量约为6亿吨,其中稻谷产量2亿吨,玉米产量2.1亿吨。而粮食从田里成熟到加工成品出厂,中间最少需要转运一到十亿吨。而其中大部分粮食转运都由公路运输完成,这就使得粮食运粮车需求量相当大,目前国内粮食的转运方式大多数采用以下几种方法,包括人工装袋装车;通过传送带或者铲车将散粮直接装进仓栏车内,再运输至库中以及通过铁路运输,粮食“四散化”是粮食物流现代化的重要标志,散装粮食运输车则为粮食“四散化”而研发出,在转运粮食中扮演着重要的角色。
2、虽然散粮食车在操作时只需要一人即可进行操作,并且很好地节省了劳动力,同时也可省去包装费,降低了转运的成本,但是目前在转运路线的选择上,一般情况下仅仅只是考虑单辆运粮车从起点到终点的距离长短进行线路规划,而操作员在规划路线时也仅仅只是简单的通过导航对起点到终点进行搜索并根据导航推荐的最短路线进行行驶,从而忽略了实际转运总量的需求导致在整体进行转运时效率不高,同时面对路况天气原因可能造成运粮车上运输的粮食被雨水浸湿以及因路面陡峭不平造成粮食发生泄漏造成一定的损失。
3、因此,针对上述问题提出一种无人收获机协同卸粮路径规划与自主作业方法。
技术实现思路
1、1.要解决的技术问题
2、针对现有技术中存在的问题,本方案通过提出一种无人收获机与无人卸粮车协作的机制,在收获卸粮及运粮的过程中,针对传统无人收获机等待运粮车直接卸粮转运的模式,引入无人卸粮车按照既定的路径规划方法,自主寻找待卸粮的无人收获机,并自动进行无人收获机到运粮车之间的转运,有效解决了传统无人收获机到运粮车转移和卸粮的作业时间浪费,并有效解决了因为运粮车的运力不足而导致无人收获机粮满后田间等待卸粮的时间,进一步保障了无人收获机不间断作业,很大程度上提升了无人收获机综合作业效率。
3、2.技术方案
4、为解决上述问题,本发明采用如下的技术方案。
5、一种无人收获机协同卸粮路径规划与自主作业方法,包括以下步骤:
6、s1、自主出库:人工通过遥控器遥控无人收获机点火,随即通过遥控器给无人收获机下达出库指令,无人收获机按照规划路径自主出库,随后,无人收获机向运粮车发送跟随出库指令,运粮车自动点火启动并沿预规划路径自主出库,运粮车车实时接收无人收获机运行状态与行走速度,并根据速度进行安全跟随控制。
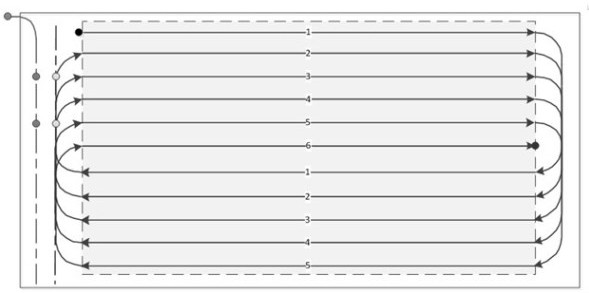
7、s2、无人收获:运粮车到达无人运粮车等待点即进入停车等待模式;无人收获机到达收获作业起点即自主开始无人化收割作业,无人收获作业规划路径为套圈式路径,如图1所示,规划的作业路径将未割区划对称分为2个作业区,完成第一个作业区第n行的作业后,沿地头移动到第二个作业区相应为n作业行进行反向收割,收割完成后再移动到第一个作业区对编号为n+1的作业行进行收割,以此循环直至作业结束。
8、s3、协同卸粮:无人收获机按套圈式路径自主作业,其调头过程中的直线行走路径位于一条直线上,以此直线为无人收获机卸粮作业线;为保证无人收获机在该直线段上自动触发卸粮,无人收获机粮仓内加装3个粮位传感器:1号粮位传感器位于粮仓的70%~80%粮位处,2号粮位传感器位于粮仓底部,3号粮位传感器位于粮仓顶部;当1号粮位信号触发后,无人收获机继续作业直到回到卸粮作业线并调头对上下一条作业行后,无人收获机自主停车并向运粮车发送协同卸粮指令和当前卸粮位置,同时自动升起卸粮高位并旋转至与卸粮作业线垂直的位置,等待运粮车自主沿协同卸粮转运路径靠近无人收获机;运粮车到达接粮点后自动停车并通知无人收获机就位,无人收获机随机结合卸粮离合开始卸粮,直至2号粮位信号触发完成卸粮并通知运粮车卸粮完成,随即自动收起卸粮高位并继续开始收割作业;运粮车收到无人收获机卸粮完成指令后,沿卸粮转运路径向等待点转移,若粮仓未满则等待下一次无人收获机卸粮,反之,则向运粮车进行卸粮。
9、s4、自主入库:无人收获机完成收割后,从收获结束点沿预规划的入库路径向机库移动,同时通知运粮车开始入库,到达机库后自动停车熄火,全过程无人作业结束。
10、3.有益效果
11、相比于现有技术,本发明的优点在于:
12、(1)本方案通过提出一种无人收获机与无人卸粮车协作的机制,在收获卸粮及运粮的过程中,针对传统无人收获机等待运粮车直接卸粮转运的模式,引入无人卸粮车按照既定的路径规划方法,自主寻找待卸粮的无人收获机,并自动进行无人收获机到运粮车之间的转运,有效解决了传统无人收获机到运粮车转移和卸粮的作业时间浪费,并有效解决了因为运粮车的运力不足而导致无人收获机粮满后田间等待卸粮的时间,进一步保障了无人收获机不间断作业,很大程度上提升了无人收获机综合作业效率。
技术特征:
1.一种无人收获机协同卸粮路径规划与自主作业方法,其特征在于:包括以下步骤:
技术总结
本发明公开了一种无人收获机协同卸粮路径规划与自主作业方法,属于无人卸粮转运技术领域,本方案通过提出一种无人收获机与无人卸粮车协作的机制,在收获卸粮及运粮的过程中,针对传统无人收获机等待运粮车直接卸粮转运的模式,引入无人卸粮车按照既定的路径规划方法,自主寻找待卸粮的无人收获机,并自动进行无人收获机到运粮车之间的转运,有效解决了传统无人收获机到运粮车转移和卸粮的作业时间浪费,并有效解决了因为运粮车的运力不足而导致无人收获机粮满后田间等待卸粮的时间,进一步保障了无人收获机不间断作业,很大程度上提升了无人收获机综合作业效率。
技术研发人员:刘政,金诚谦,杨腾祥,王廷恩,齐彦栋,刘岗微,冯玉岗,张光跃,陈满,倪有亮,徐金山,袁文胜,钱震杰
受保护的技术使用者:农业农村部南京农业机械化研究所
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!