一种船舶近壳体瞬态噪声源的水声和振动融合定位方法
本发明属于异常声源定位,具体地说是一种船舶近壳体瞬态噪声源的水声和振动融合定位方法。
背景技术:
1、船舶在使用过程中由于各种原因,例如船体、螺旋桨、机械设备的使用老化和磨损或零件脱落等,都可能出现振动噪声的异常,这类噪声源的定位、排除直接关系到船舶的安全航行和使用寿命。相比传统噪声源的控制,该类异常事件具有突发性,信号特征具有非平稳性,难以通过早期的检查和实验进行预测。现阶段,船舶瞬态噪声源定位,主要凭借船员的主观经验对可能部位逐一开展排查,当噪声源位于船体外侧,这项工作不具可行性。采用各类声学、振动传感器对这类噪声源进行定位,可以极大的减轻人力和经济成本,有效提升船舶质量维护水平,具有重要意义。
2、目前常见的水下噪声源定位方法都是基于水听器信号,通过近场声全息、波束形成、到达时间差等技术实现。其中,近场声全息算法对传感器数量、传感器阵列形状等要求较高,波束形成算法不适用于声源与传感器距离较近的应用场景。
3、为此,本领域技术人员提出了一种船舶近壳体瞬态噪声源的水声和振动融合定位方法来解决背景技术提出的问题。
技术实现思路
1、为了解决上述技术问题,本发明提供一种船舶近壳体瞬态噪声源的水声和振动融合定位方法,可以在线定位瞬态噪声源位置,具备定位精度高、计算速度快的优点。
2、一种船舶近壳体瞬态噪声源的水声和振动融合定位方法,包括以下步骤:
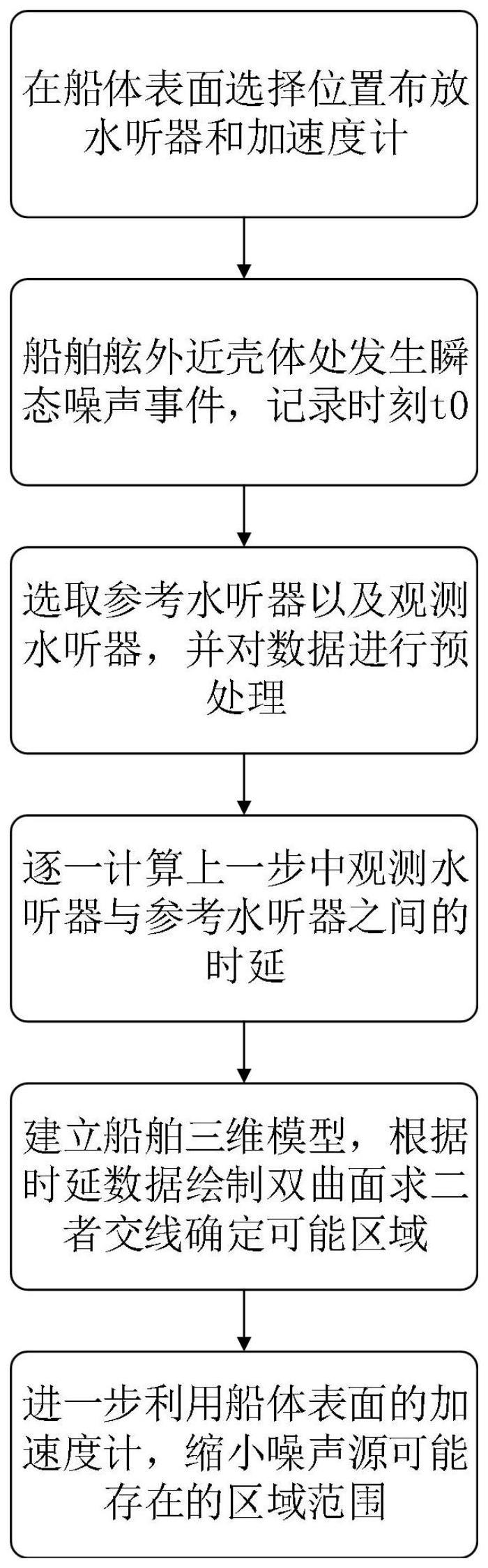
3、s1、首先在船体表面选择位置布放水听器和加速度计,用于采集舷外水声信号及壳体振动信号;
4、s2、当船舶舷外近壳体处发生瞬态噪声事件,根据水声信号判定瞬态噪声事件记录时刻t0;
5、s3、接着选取参考水听器以及观测水听器,并对数据进行预处理;
6、s4、逐一计算步骤s3中的观测水听器与参考水听器之间的时延;
7、s5、通过利用已知的船舶结构数据,建立船舶三维模型,然后根据双曲定位原理,且由步骤s4中的已知时延数据绘制双曲面,再结合船舶三维模型计算两者的交线,最后确定噪声源的可能区域;
8、s6、在步骤s5的基础上,进一步利用船体表面的加速度计,按照振动信号强度对比,缩小步骤s5中的噪声源可能存在的区域范围。
9、优选的,在步骤s1中,所述水听器布放在船体外表面,加速度计布放在船体内表面,且水听器数量m≥3,加速度计数量l≥2。
10、优选的,在步骤s2中,所述的瞬态噪声事件判定的标准为:任一水听器监测的舷外水声信号总级超过报警阈值,或任一加速度计所监测的壳体振动信号总级超过报警阈值;单次超阈值的信号持续时间,在1s以内;且两次超阈值的信号之间,存在0.2s以上的间隔。
11、优选的,在步骤s3中,所述水听器为参考点水听器或者为观测点水听器,并对数据进行预处理的方法如下:
12、a、选择包含t0时刻前、后各δt的数据作为瞬态噪声数据,其中,δt可为200ms;
13、b、t0时刻向前1秒为背景噪声记录时刻,记作tb,选择包含tb时刻前、后各δt的数据作为背景噪声数据;
14、c、对瞬态噪声数据和背景噪声数据分别进行傅里叶变换,并在频域上划分为n个频段,中心频率分别记作f1、f2...fn;
15、d、分别对每个水听器,计算瞬态噪声、背景噪声各个频段的能量,分别记作e1m、e2m...enm和e01m、e02m...e0nm,其中,m表示水听器编号,有m=1,2,…,m;
16、e、计算每个水听器每个频段的能量超标量,记作δenm=enm-e0nm,其中,n表示频段编号,有n=1,2,…,n;
17、f、对比得到δenm中取最大值的频段,即δegm=max(δenm),该频段编号fg为瞬态噪声事件的主要特征频段;
18、g、对比选取δegm中最大的三个值,记作δegh、δegi、δegj,即编号为h、i和j的3个水听器,其中任选1个作为参考点水听器,记作h号,其他2个作为观测点水听器,记作i号和j号。
19、优选的,在步骤s4中,逐一计算观测水听器与参考水听器之间时延的方法如下:
20、ⅰ.根据步骤g,选取参考点水听器和观测点水听器,其相应的瞬态噪声数据记作:ph、pi和pj;
21、ⅱ.对ph、pi和pj进行希尔伯特变换,并对变换的结果取绝对值,得到qh、qi和qj;
22、ⅲ.分别计算qh、qi和qj的最大值,记作qhm、qim和qjm;
23、ⅳ.在0至1之间选取一个幅值系数a,在qh、qi和qj曲线上,首次取值为qhm·a、qim·a和qjm·a所对应的时刻,分别记作th、ti和tj;
24、ⅴ.h号水听器相对于i水听器的时延为:τhi=th-ti;h号水听器相对于j水听器的时延为:τhi=th-ti。
25、优选的,步骤s5通过以下过程具体进行:
26、(1)对船舶壳体建立固定坐标系下的三维模型,标记参考水听器(xh yh zh)和观测水听器(xi yi zi)和(xj yj zj)的坐标位置;
27、(2)根据步骤(4)计算的时延差τhi和τhj,建立定位方程组,并绘制定位双曲面;
28、
29、
30、其中,v为声波传播速度;
31、(3)结合步骤(2)得到的双曲面和步骤(1)的船舶壳体三维模型,计算两者交线,为瞬态噪声源可能存在的区域。
32、优选的,在步骤s6中,缩小步骤s5中噪声源可能存在的区域范围采用以下方法:
33、(i)根据加速度计在船舶壳体分布,将其划分为若干网格区域;
34、(ii)对所有加速度计,计算t0时刻前、后各δt时间段内,位于编号fg频段内的振动信号能量,记作εl,l表示频段编号,有l=1,2,…,l;
35、(iii)对所有加速度计,计算tb时刻前、后各δt时间段内,位于编号fg频段内的振动信号能量,记作ε0l,l表示频段编号,有l=1,2,…,l;
36、(iv)计算所有加速度计,特征频段内的振动信号能量增加量δεl=εl-ε0l;
37、(v)对比选取不同加速度计特征频段内的振动信号能量增加量的最大值δεk,编号k加速度计所对应的网格区域为噪声源可能存在的区域。
38、优选的,步骤s6缩小噪声源可能存在的区域范围的方法如下:
39、①取权利要求6中步骤(3)和权利要求7中步骤(v)所得到的区域的相交部分,作为瞬态噪声源存在区域;
40、②如果权利要求6中步骤(3)和权利要求7中步骤(v)所得到的区域不存在相交部分,则对比选取不同加速度计特征频段内的振动信号能量增加量的第二大值δεk1,取编号k1加速度计所对应的网格区域和权利要求6中步骤(3)所得到的区域的相交部分;
41、③以此类推,直到选出两类区域相交部分作为瞬态噪声源存在区域。
42、与现有技术相比,本发明具有如下有益效果:
43、1、本发明通过在船体表面选择位置布放水听器和加速度计,根据水听器可以确定噪声源可能存在的区域,进一步利用船体表面的加速度计,根据振动信号强度对比结果,缩小上述区域范围。具备定位精度高的优点。
44、2、本发明通过利用时延数据计算绘制双曲面并求解与已知三维模型的交线,公式复杂程度较低,无需大量的计算,能够在线定位瞬态噪声源位置,具备计算速度快的优点。
- 还没有人留言评论。精彩留言会获得点赞!