模糊度固定方法、装置、接收机及存储介质与流程
本技术实施例涉及卫星导航定位,具体而言,涉及一种模糊度固定方法、装置、接收机及存储介质。
背景技术:
1、gnss(global navigation satellite system,全球导航卫星系统)为全天候、全球、高精度的无线电导航技术,可在任何时间、任何地点获取到绝对位置坐标,可应用于测量测绘、自动驾驶等领域。随着自动驾驶行业的发展,对gnss定位的实时性、定位精度、连续性和可靠性提出了更高的需求。
2、gnss观测数据主要有载波相位观测值、伪距观测值、多普勒观测值和载噪比等类型,伪距观测值精度为米级甚至分米级、多普勒观测值测速精度可达到分米级,相位观测值精度可达到毫米级。但是,相位观测值存在整周模糊度,需将其作为未知数参与滤波器解算,且需采取模糊度固定方法将其固定成整数,定位结果才能获取厘米级甚至毫米级精度。若模糊度固定错误,则将导致固定解误差偏大的情况发生,若模糊度无法固定则很难达到厘米级定位精度。
3、因此,如何提高模糊度固定的准确性,是需要解决的技术问题。
技术实现思路
1、本技术实施例的目的在于提供一种模糊度固定方法、装置、接收机及存储介质,能够提高模糊度固定率以及减少错误固定的概率,以满足gnss高精度定位的需求。
2、为了实现上述目的,本技术实施例采用的技术方案如下:
3、第一方面,本技术实施例提供了一种模糊度固定方法,所述方法包括:
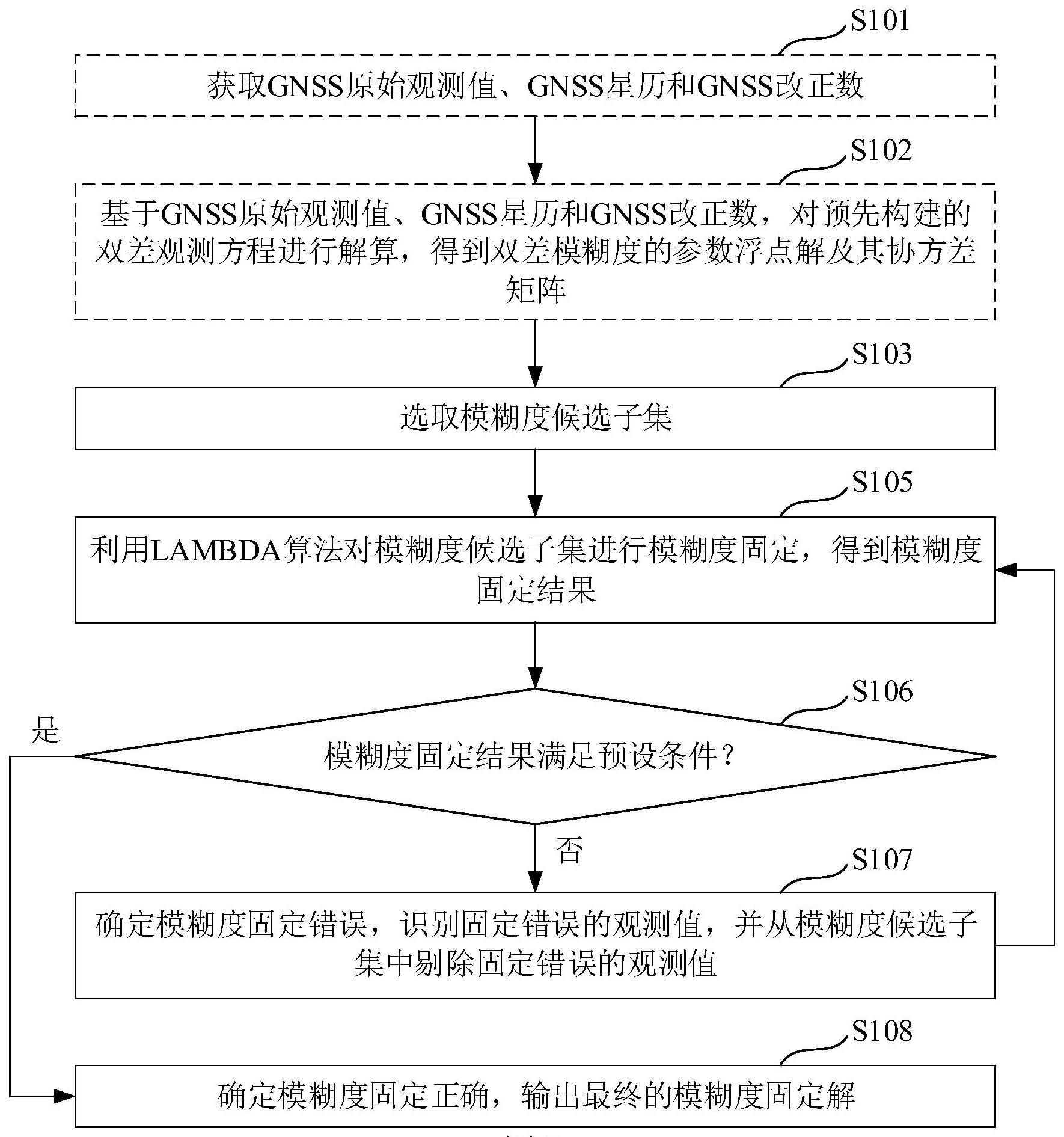
4、选取模糊度候选子集;
5、利用lambda算法对所述模糊度候选子集进行模糊度固定,得到模糊度固定结果;
6、判断所述模糊度固定结果是否满足预设条件;
7、若所述模糊度固定结果满足所述预设条件,则确定模糊度固定正确,输出最终的模糊度固定解;
8、若所述模糊度固定结果不满足所述预设条件,则确定模糊度固定错误,识别固定错误的观测值,并从所述模糊度候选子集中剔除所述固定错误的观测值后,重新执行所述利用lambda算法对所述模糊度候选子集进行模糊度固定的步骤,直至模糊度固定正确。
9、可选地,所述模糊度候选子集包括双差模糊度的参数浮点解及其协方差矩阵;
10、所述利用lambda算法对所述模糊度候选子集进行模糊度固定,得到模糊度固定结果的步骤,包括:
11、将所述双差模糊度的参数浮点解及其协方差矩阵输入所述lambda算法进行搜索,得到双差模糊度的整数解及其ratio值;
12、将所述双差模糊度的整数解代入预先构建的双差载波观测方程,得到固定解;
13、对所述固定解进行最小二乘解算,得到所述固定解的坐标参数;
14、基于所述双差模糊度的整数解和所述固定解的坐标参数,计算每个载波相位的验后残差;
15、其中,所述模糊度固定结果包括每个所述载波相位的验后残差、所述双差模糊度的整数解的ratio值和所述双差模糊度的个数。
16、可选地,所述基于所述双差模糊度的整数解和所述固定解的坐标参数,计算每个载波相位的验后残差的步骤,包括:
17、根据所述固定解的坐标参数、基准站坐标、不同卫星在基准站处计算的广播星历坐标和不同卫星在流动站处计算的广播星历坐标,计算所述固定解的坐标参数、基准站和流动站分别到不同卫星间的卫地距;
18、根据所述固定解的坐标参数、基准站和流动站分别到不同卫星间的卫地距,计算卫地距双差值;
19、基于所述双差模糊度的整数解和所述卫地距双差值,计算每个所述载波相位的验后残差。
20、可选地,所述卫地距双差值满足公式:
21、
22、其中,为双差差分算子,b为基准站的接收机编号,r为流动站的接收机编号,s为卫星,ref为参考卫星;为所述固定解的坐标参数与卫星s间的卫地距,为所述基准站与卫星s间的卫地距,为所述流动站到参考卫星ref间的卫地距,为所述基准站到参考卫星ref间的卫地距。
23、可选地,所述固定解的坐标参数与卫星s间的卫地距满足公式:
24、
25、所述基准站与卫星s间的卫地距满足公式:
26、
27、所述流动站到参考卫星ref的卫地距满足公式:
28、
29、所述基准站到参考卫星ref的卫地距满足公式:
30、
31、其中,(xb,yb,zb)为基准站坐标,为卫星s在基准站处计算的广播星历坐标,为参考卫星ref在基准站处计算的广播星历坐标;为卫星s在流动站处计算的广播星历坐标,为参考卫星ref在流动站处计算的广播星历坐标;为所述固定解的坐标参数。
32、可选地,每个所述载波相位的验后残差满足公式:
33、
34、其中,为双差差分算子,b为基准站的接收机编号,r为流动站的接收机编号,s为卫星,ref为参考卫星;为频率编号,λi为载波相位波长,为载波双差观测值;vi表示所述验后残差,为所述卫地距双差值,为所述双差模糊度的整数解。
35、可选地,所述模糊度固定结果包括每个所述载波相位的验后残差、所述双差模糊度的整数解的ratio值和所述双差模糊度的个数;
36、所述预设条件包括:所述卡方检验通过且所述双差模糊度的整数解的ratio值大于设定值且所述双差模糊度的个数大于设定个数;
37、所述判断所述模糊度固定结果是否满足预设条件的步骤,包括:
38、将每个所述载波相位的验后残差代入预先构建的卡方检验量进行卡方检验;
39、若所述卡方检验通过且所述双差模糊度的整数解的ratio值且所述双差模糊度的个数大于设定个数,则确定模糊度固定结果满足预设条件;
40、若所述卡方检验未通过或者所述双差模糊度的整数解的ratio值不大于设定值或者所述双差模糊度的个数不大于设定个数,则确定模糊度固定结果不满足预设条件。
41、可选地,假设观测到的卫星列表为s1,s2,s3,...,sn,则所述卡方检验量满足公式:
42、
43、其中,chitest为满足自由度为n-t的卡方检验,sigma0为理论上能达到的精度;j为卫星编号,为频率编号;b为基准站的接收机编号,r为流动站的接收机编号;ref为参考卫星;vi表示所述验后残差,pi表示观测值权重。
44、可选地,所述模糊度固定结果包括每个所述载波相位的验后残差;
45、所述识别固定错误的观测值的步骤,包括:
46、对每个所述载波相位的验后残差进行标准化,得到每个所述载波相位的标准化残差;
47、基于每个所述载波相位的标准化残差进行抗差估计,得到抗差估计后的固定解坐标参数;
48、基于所述抗差估计后的固定解坐标参数,重新解算每个所述载波相位的验后残差;
49、将重新解算所得的验后残差最大值对应的卫星的观测值,作为所述固定错误的观测值。
50、可选地,所述基于每个所述载波相位的标准化残差进行抗差估计,得到抗差估计后的固定解坐标参数的步骤,包括:
51、根据每个所述载波相位的标准化残差,利用公式:
52、
53、进行选权迭代,得到选权迭代后的观测值权重;
54、其中,为频率编号,pi为进行抗差估计前的初始观测值权重,为选权迭代后的观测值权重,为所述标准化残差;k0和k1为常量;
55、根据选权迭代后的观测值权重重新解算位置,得到所述抗差估计后的固定解坐标参数。
56、可选地,在所述选取模糊度候选子集的步骤之前,所述方法还包括:
57、获取gnss原始观测值、gnss星历和gnss改正数;
58、基于所述gnss原始观测值、所述gnss星历和所述gnss改正数,对预先构建的双差观测方程进行解算,得到双差模糊度的参数浮点解及其协方差矩阵。
59、第二方面,本技术实施例还提供了一种模糊度固定装置,所述装置包括:
60、选取模块,用于选取模糊度候选子集;
61、模糊度固定模块,用于利用lambda算法对所述模糊度候选子集进行模糊度固定,得到模糊度固定结果;
62、判断模块,用于判断所述模糊度固定结果是否满足预设条件;
63、第一执行模块,用于若所述模糊度固定结果满足所述预设条件,则确定模糊度固定正确,输出最终的模糊度固定解;
64、第二执行模块,用于若所述模糊度固定结果不满足所述预设条件,则确定模糊度固定错误,识别固定错误的观测值,并从所述模糊度候选子集中剔除所述固定错误的观测值后,重新执行所述利用lambda算法对所述模糊度候选子集进行模糊度固定的步骤,直至模糊度固定正确。
65、第三方面,本技术实施例还提供了一种接收机,包括处理器和存储器,所述存储器用于存储程序,所述处理器用于在执行所述程序时,实现上述第一方面中的模糊度固定方法。
66、第四方面,本技术实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现上述第一方面中的模糊度固定方法。
67、相对现有技术,本技术实施例提供的一种模糊度固定方法、装置、接收机及存储介质,先通过lambda算法对所述模糊度候选子集进行模糊度固定,得到模糊度固定结果,若模糊度固定结果满足预设条件,则确定模糊度固定正确,输出最终的模糊度固定解,若模糊度固定结果不满足预设条件,则确定模糊度固定错误,识别固定错误的观测值,并从模糊度候选子集中剔除固定错误的观测值后,重新利用lambda算法对模糊度候选子集进行模糊度固定,直至模糊度固定正确;从而可以提高模糊度固定的准确性,以满足gnss高精度定位的需求。
- 还没有人留言评论。精彩留言会获得点赞!