一种矩阵式样品盘三轴精确定位算法的制作方法
本发明涉及三轴精确定位,特别是一种矩阵式样品盘三轴精确定位算法。
背景技术:
1、在自动化仪器中,样品盘是十分常见的部件,仪器添加样品时对三轴定位的精度要求很高,因此在生产环节对样品盘的安装有严格的要求,安装时的偏差将导致三轴定位偏差,针对上述问题,现有技术中可能已经存在了解决的技术手段,但是本案想要提供一种替代或替换的技术方案。
技术实现思路
1、实现上述目的本发明的技术方案为:一种矩阵式样品盘三轴精确定位算法,包括以下步骤:步骤s1、样品盘4个原始点校准,步骤s2、检测点测量,步骤s3、x、y、z轴行计算,步骤s4、x、y、z列行计算;
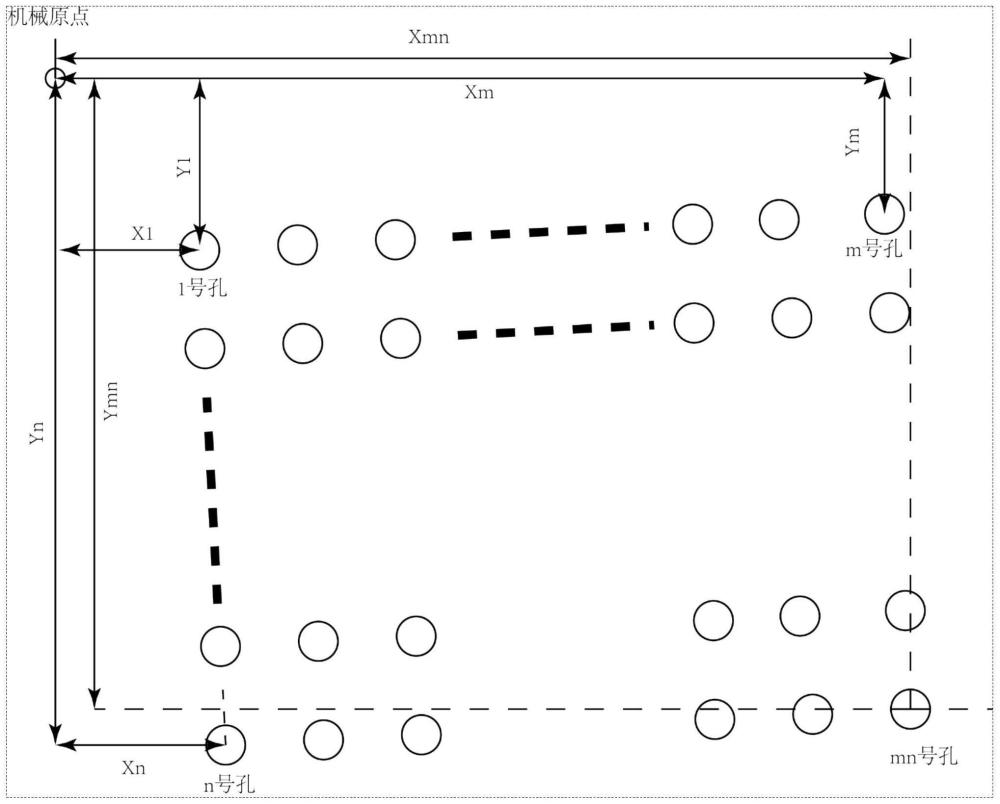
2、步骤s1:样品盘上4个孔进行校准,经过计算,得到每个孔相对于机械原点的xyz坐标,该坐标就是运动部件从原点出发向任意孔运动时的运行距离;
3、步骤s2:由于样品盘安装时不一定垂直,也不一定水平,x1和xn、y1和ym不一定相等;
4、步骤s3:第1行:1号孔至m号孔xyz坐标计算;
5、x增量δx=xm–x1;
6、y增量δy=ym–y1;
7、z增量δz=zm–z1;
8、第n行:n号孔至mn号孔xyz坐标计算;
9、x增量δx=xmn–xn;
10、y增量δy=ymn–yn;
11、z增量δz=zmn–z1 n;
12、步骤s4:第1列:1号孔至n号孔xyz坐标计算;
13、x增量δx=xn–x1;
14、y增量δy=yn–y1;
15、z增量δz=zn–z1;
16、第m列:m号孔至mn号孔xyz坐标计算;
17、x增量δx=xmn–xm;
18、y增量δy=ymn–ym;
19、z增量δz=zmn–zm。
20、所述步骤s3,n个孔位间隔是(n-1);
21、第1列任一孔k的x坐标:xk=(k-1)*δx/(n-1)+x1;第1列任一孔k的y坐标:yk=(k-1)*δy/(n-1)+y1;第1列任一孔k的z坐标:zk=(k-1)*δz/(n-1)+z1。所述步骤s4,n个孔位间隔是(n-1);
22、第m列任一孔k的x坐标:xk=(k-1)*δx/(n-1)+x1;第m列任一孔k的y坐标:yk=(k-1)*δy/(n-1)+y1;第m列任一孔k的z坐标:zk=(k-1)*δz/(n-1)+z1。所述步骤s3,第1行:1号孔至m号孔xyz坐标计算;
23、x增量δx=xm–x1;
24、y增量δy=ym–y1;
25、z增量δz=zm–z1;
26、m个孔位间隔是(m-1);
27、第1行任一孔k的x坐标:xk=(k-1)*δx/(m-1)+x1;第1行任一孔k的y坐标:yk=(k-1)*δy/(m-1)+y1;第1行任一孔k的z坐标:zk=(k-1)*δz/(m-1)+z1。所述步骤s4,第n行:n号孔至mn号孔xyz坐标计算;
28、x增量δx=xmn–xn;
29、y增量δy=ymn–yn;
30、z增量δz=zmn–z1 n;
31、m个孔位间隔是(m-1);
32、第1行任一孔k的x坐标:xk=(k-1)*δx/(m-1)+x1;第1行任一孔k的y坐标:yk=(k-1)*δy/(m-1)+y1;第1行任一孔k的z坐标:zk=(k-1)*δz/(m-1)+z1。所述第w行、第h列,任意孔的位置计算;
33、y坐标ywh的计算;
34、第w行的第1列y坐标为yw1,
35、第w行的第m列y坐标为ywm,
36、y坐标的总增量即为δy=ywm-yw1;
37、孔间隔数量m-1;
38、y方向每个孔的坐标增量spc=δy/(m-1);
39、第h列总共有h–1个增量,所以:
40、ywh=(h-1)*δy/(m-1)+yw1。
41、所述x坐标xwh的计算:
42、第h列的第1行x坐标为xh1;
43、第h列的第n行x坐标为xhn;
44、那么,x坐标的总增量即为δx=xhn-xh1;
45、行的总增量即为δr=n–1;
46、x方向每个孔的坐标增量spc=δx/(n–1);
47、第w行总共有w-1个增量,所以:
48、xwh=(w-1)*δx/(n–1)+xh1。
49、所述z坐标zwh的计算;
50、第h列的第1行z坐标为zh1;
51、第h列的第n行z坐标为zhn;
52、z的总增量即为δz=zhn-zh1;
53、行的总增量即为δr=h–1;
54、z方向每个孔的坐标增量spc=δz/(h–1);
55、zwh=(h-1)*δz/(h–1)+zh1;
56、利用本发明的技术方案制作的矩阵式样品盘三轴精确定位算法,与现有技术相比:本发明从软件算法上解决这个问题,使得样品盘的安装不需要很严格,对垂直度和平整度要求很低,只要所有的盘孔在轴距范围内即可。
技术特征:
1.一种矩阵式样品盘三轴精确定位算法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种矩阵式样品盘三轴精确定位算法,其特征在于,所述步骤s3,n个孔位间隔是(n-1);
3.根据权利要求1所述的一种矩阵式样品盘三轴精确定位算法,其特征在于,所述步骤s4,n个孔位间隔是(n-1);
4.根据权利要求1所述的一种矩阵式样品盘三轴精确定位算法,其特征在于,所述步骤s3,第1行:1号孔至m号孔xyz坐标计算;
5.根据权利要求1所述的一种矩阵式样品盘三轴精确定位算法,其特征在于,所述步骤s4,第n行:n号孔至mn号孔xyz坐标计算;
6.根据权利要求1所述的一种矩阵式样品盘三轴精确定位算法,其特征在于,所述第w行、第h列,任意孔的位置计算;
7.根据权利要求1所述的一种矩阵式样品盘三轴精确定位算法,其特征在于,所述x坐标xwh的计算:
8.根据权利要求1所述的一种矩阵式样品盘三轴精确定位算法,其特征在于,所述z坐标zwh的计算;
技术总结
本发明公开了一种矩阵式样品盘三轴精确定位算法,包括以下步骤:步骤S1、样品盘4个原始点校准,步骤S2、检测点测量,步骤S3、X、Y、Z轴行计算,步骤S4、X、Y、Z列行计算;本发明的有益效果是,本发明从软件算法上解决这个问题,使得样品盘的安装不需要很严格,对垂直度和平整度要求很低,只要所有的盘孔在轴距范围内即可。
技术研发人员:郝俊,孟现平,刘丰奎,牛军,彭皓,孙二芳,唐群燕,李扬
受保护的技术使用者:上海安杰智创科技股份有限公司
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!