基于压力传感器低速旋转部件的配平系统及配平方法
本发明属于测试计量设备,涉及基于压力传感器低速旋转部件的配平系统,还涉及上述旋转部件的配平方法。
背景技术:
1、回转件是旋转机械的核心部件,其平衡特性直接影响着设备运行的稳定性、安全性和可靠性。低速旋转部件如单晶炉提拉系统,虽然提拉系统的工作转速比较低,一般为10r/min-40r/min,但是其工作性质要求必须在工作转速内的稳定性很高,单晶炉提拉系统的轻微摆动都会引起其下方连接的软轴钢丝绳底部大幅摆动,进而影响晶体生长的质量。配平的目的是让回转件运转时质心与旋转中心一致或处于允许范围,保证其安全平稳运行。
2、单晶炉提拉头属于低转速刚性转子,如果采用高速转子的平衡方式,会对零部件造成损害;如果采用静平衡方法进行平衡,那么只能在静止状态下保持平衡,无法保证整个工作转速下的平衡,因此对低速旋转部件需要专门进行配平研究。针对低转速刚性回转件的配平,比如单晶炉提拉头,其形状复杂不易配平。目前在实际操作中采用人工估算调整平衡,造成效率低、周期长且测量精度有限等问题。有研究者利用ug建模软件建立单晶炉提拉头模型,计算出提拉头的质心,进行配平,但是仅停留在理论研究并未将其结果应用于实际设备,平衡问题并未解决。由此可见,研究低速旋转部件配平方法,开发低速旋转部件配平系统,自动计算配平信息是迫切需要解决的问题。
技术实现思路
1、本发明的目的是提供一种基于压力传感器低速旋转部件的配平系统,解决了现有技术中存在的人工估算调整平衡效率低、周期长且测量精度有限的问题。
2、本发明的另一目的是提供一种上述旋转部件的配平方法。
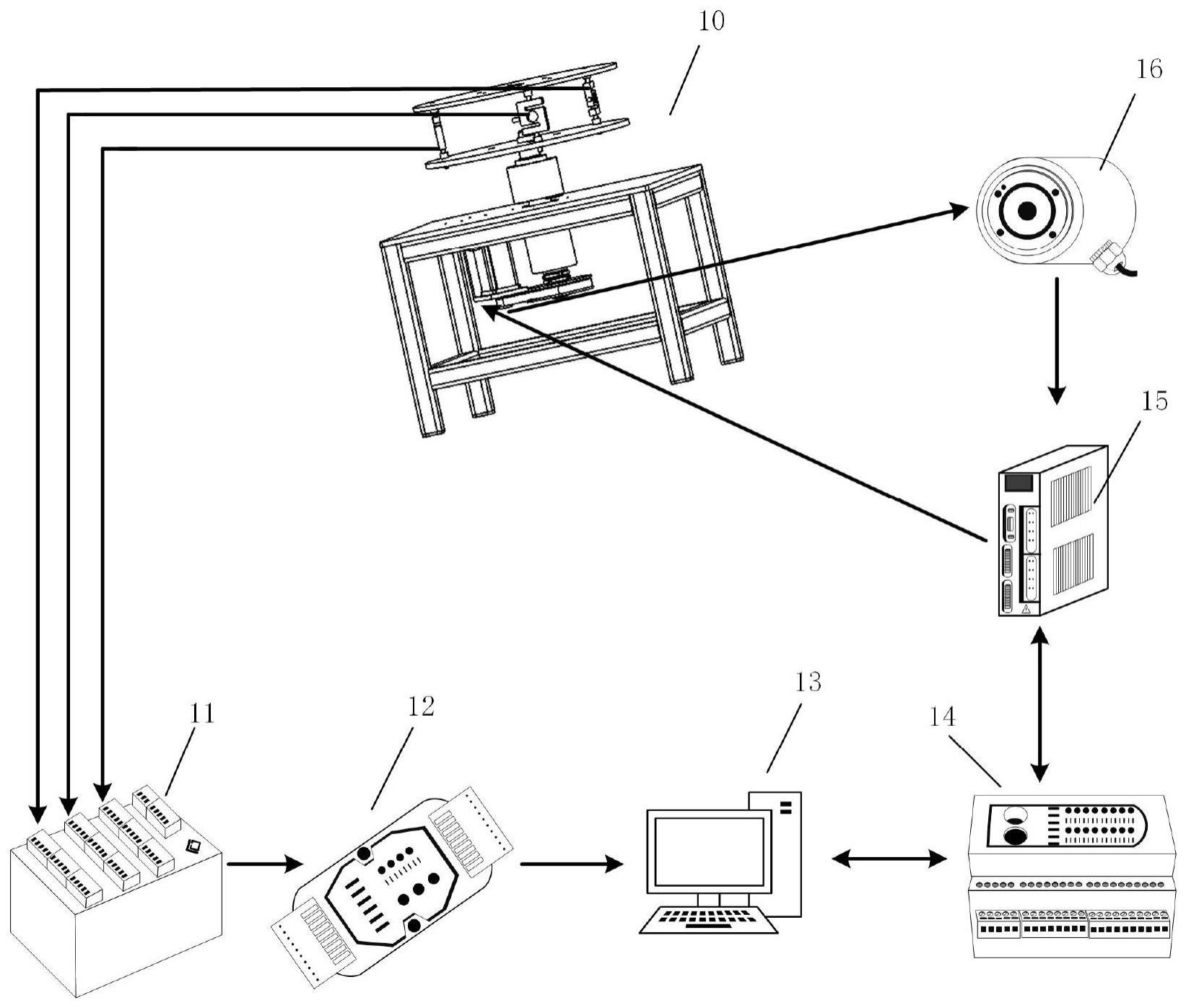
3、本发明所采用的技术方案是,基于压力传感器低速旋转部件的配平系统,包括配平装置,配平装置通过导线和三通道变送器连接,三通道变送器的输出端与转接头的输入端连接,转接头的输出端安装在计算机的串口上,计算机通过导线连接plc的接口,plc的输出端连接伺服驱动器的输入端,伺服驱动器的输出端与配平装置连通,形成闭合回路;
4、配平装置上还设置有挂物底板和伺服电机,伺服电机的输入端与伺服驱动器的输出端连接。
5、本发明的特点还在于:
6、配平装置的信号端还连接测速编码器,测速编码器的输出端接入伺服驱动器的输入端。
7、配平装置包括底座架,底座架上部固定测量台面,测量台面的中心处开有通孔,通孔内设置轴,轴的一端安装传感器底板、另一端设置从动轮,测量台面在靠近从动轮的面上固定有电机支架,电机支架上安装伺服电机,伺服电机的输出轴上设置同步带轮,同步带轮和从动轮之间通过同步带连接;传感器底板为圆形,传感器底板上沿着圆周方向均匀设置三个压力传感器,三个压力传感器的一端通过螺钉固定在传感器底板,另一端通过螺钉和挂物底板固定;轴在传感器底板和从动轮之间外套电刷滑环。
8、挂物底板在与轴同心处设置有螺栓孔。
9、三个压力传感器采用s型,三个压力传感器的输出端通过导线和三通道变送器连接,伺服电机的信号端与测速编码器连接。
10、转接头为rs485/rs232。
11、本发明所采用的另一技术方案是,上述旋转部件的配平方法,具体按照以下步骤实施:
12、步骤1、将旋转部件通过螺栓固定在挂物底板的螺栓孔中;
13、步骤2、在静止状态下建立静态检测坐标系,求出旋转部件的不平衡角度和半径;
14、步骤3、启动伺服电机,使伺服电机按照设定转速转动,在动态状态下计算不平衡高度;
15、步骤4、根据步骤2和步骤3得到旋转部件的不平衡角度、半径和不平衡高度,在配平位置p配处增加一个配平块m配即可配平。
16、本发明另一技术方案的特点还在于:
17、步骤2具体为:
18、步骤2.1、以挂物底板(3)的中心为极心o建立极坐标系,三个所述压力传感器(1)与所述挂物底板(3)接触处的坐标点分别为a、b、c,则三个所述压力传感器(1)测得的支撑力分别为fa(r,0°)、fb(r,120°)和fc(r,240°);
19、步骤2.2、建立以bc、ac、ab为轴的转矩分析系统,根据力矩平衡原理,将旋转部件不平衡质量的位置投影到oa、ob、oc分别得到fa、fb、fc的力矩表达式:
20、
21、
22、
23、在式(1)~式(3)中:fa、fb、fc为压力传感器的力值;m0为旋转部件的质量;r为压力传感器距离o点的半径;θ为不平衡角度;r0为不平衡位置距离o点的半径;
24、步骤2.3、由式(1)~式(3)可求旋转部件的不平衡角度θ和半径r0为:
25、
26、
27、步骤3具体为:
28、在动态状态下旋转部件产生的离心力为:f离=m0ω2r0 (6)
29、产生的扭矩为:t=f离·h0=m0ω2r0·h0 (7)
30、将三个所述压力传感器(1)相对o点的距离都投影在过m0质心的平面上,以m0离开o点方向为正:
31、a点的投影力臂为:r·cosθ (8)
32、b点的投影力臂为:r·cos(θ-120°) (9)
33、c点的投影力臂为:r·cos(θ-240°) (10)
34、此时离心力产生的力矩以及压力传感器受到的力矩,使配平系统在空间内处于平衡状态,与三个压力传感器的受力点形成空间力系,则:
35、fa·r·cosθ+fb·r·cos(θ-120°)+fc·r·cos(θ-240°)=m0ω2r0h0 (11)
36、即能求出旋转部件的不平衡高度h0为:
37、
38、在式(6)~式(12)中:fa、fb、fc为压力传感器的力值;m0为旋转部件的质量;θ为不平衡角度;r为压力传感器距离o点的半径;r0为不平衡位置距离o点的半径;ω为转速。
39、步骤4具体为:
40、在不平衡高度h0处增加一个配平块m配,配平块m配放置在步骤2计算出的不平衡角度θ相对回转中心o相反方向处,静态时满足fa=fb=fc,会有:m0gr0=m配gl配,即:
41、
42、式(13)中:l配为配平块m配相对回转中心o的距离;m配为配平块的质量;m0为旋转部件的质量;r0为不平衡位置距离o点的半径。
43、则在配平位置p配(l配,θ+180°)、高度h0处增加一个配平块m配即可配平。
44、本发明的有益效果是:
45、(1)本发明基于压力传感器低速旋转部件的配平系统,配平装置结构简单、制造成本低。
46、(2)本发明基于压力传感器低速旋转部件的配平系统,实现数据自动采集、电机运动控制、旋转部件重心自动计算,其功能完善、自动化程度高,极大提高了配平效率。
47、(3)本发明基于压力传感器低速旋转部件的配平方法,提供了两步法配平方法,静止状态下实现平面内配平,运动状态下实现三维空间配平,分步计算不同参数可实现高精度配平。
48、(4)本发明基于压力传感器低速旋转部件的配平系统及配平方法,解决了低速旋转部件配平只能采用人工估算的难题,可应用于单晶炉提拉头等低速旋转部件的配平。
- 还没有人留言评论。精彩留言会获得点赞!