一种基于农机作业轨迹的农田边界提取方法
本发明属于智能农机领域。
背景技术:
1、在农业管理和土地规划中,准确、高效地获取农田边界信息对于耕地保护、农田信息化、地块面积核算等资源管理至关重要。近年来,随着农业机械化、自动化和智能化的快速推进,少人甚至无人操控的智能农机自主作业将是现代农业的发展趋势。农田边界作为基础信息,是农机自主作业路径规划的前提条件。
2、目前,农田边界信息的主要提取方法包括:
3、(1)采用人工方式绕行农田周边,通过全球卫星定位系统(gnss)接收设备对边界点位置进行现场测量,并通过地理信息系统(gis)对农田边界测量数据完成矢量化处理。
4、(2)基于高分辨率农田卫星遥感影像,采用图像处理的相关技术,如基于阈值的分割、基于边缘的分割、基于区域的分割等方法,实现农田边界的提取。
5、现有的农田边界提取方法在一定的应用领域或场景下,可以满足获取农田边界信息的需求,但这些方法仍存在技术缺陷。
6、(1)农田边界的人工获取方法需要操作人员通过徒步或车载方式完成对地块边界数据的现场采集,操作繁琐、耗时耗力、成本较高。人工方式的上述不足,极大地限制了其在大规模应用中的效率和可行性。
7、(2)对于图像分割处理的农田边界提取方法,为了满足精度要求,通常需要高分辨率的遥感影像,增加了提取的成本;在应对遥感图像中的复杂的地形、植被遮挡、光照变化等情况时仍存在一些局限性,可能导致提取结果不稳定或不准确;在处理不规则形状的农田地块时可能表现不佳,无法准确提取边界。
8、(3)对于形状不规则的地块或者毗邻沟渠设施的地块,现有技术所获取的农田边界不完全适用于农机作业应用场景。
9、综上,现有技术在农田边界获取的准确性、成本、自动化程度以及适应性等方面存在一定的缺陷和问题。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。
2、为此,本发明的目的在于提出一种基于农机作业轨迹的农田边界提取方法,用于实现农田边界的高精度、自动化提取。
3、为达上述目的,本发明第一方面实施例提出了一种基于农机作业轨迹的农田边界提取方法,包括:
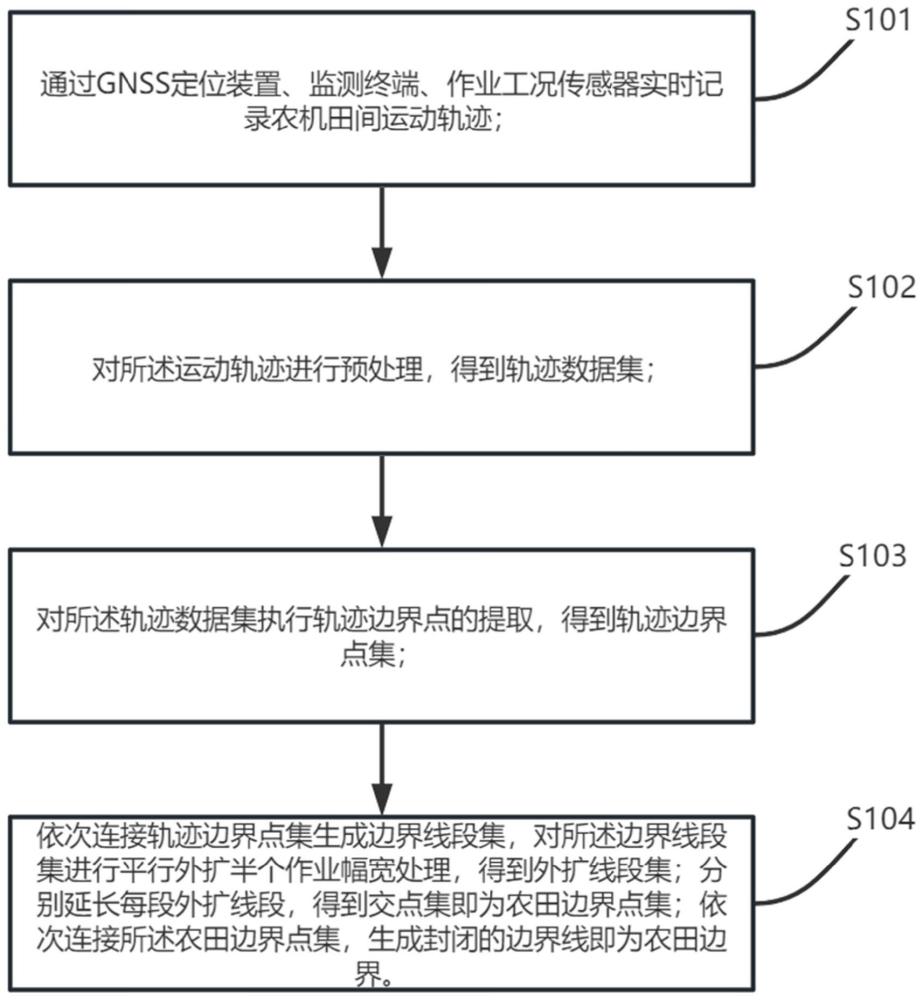
4、通过gnss定位装置、监测终端、作业工况传感器实时记录农机田间运动轨迹;
5、对所述运动轨迹进行预处理,得到轨迹数据集;
6、对所述轨迹数据集执行轨迹边界点的提取,得到轨迹边界点集;
7、依次连接轨迹边界点集生成边界线段集,对所述边界线段集进行平行外扩半个作业幅宽处理,得到外扩线段集;分别延长每段外扩线段,得到交点集即为农田边界点集;依次连接所述农田边界点集,生成封闭的边界线即为农田边界。
8、另外,根据本发明上述实施例的一种基于农机作业轨迹的农田边界提取方法还可以具有以下附加的技术特征:
9、进一步地,在本发明的一个实施例中,所述对所述运动轨迹进行预处理,包括:
10、将运动轨迹中的经纬度数据转换为平面坐标;
11、通过判断农机连续轨迹点运动速度,清理异常位置数据,具体地,
12、若pi与pi+1为时序相邻的两个轨迹点,d(pi,pi+1)为轨迹点pi与pi+1的距离,t(pi,pi+1)为轨迹点pi与pi+1的时间间隔;则农机运动速度v(pi)为
13、
14、在农机正常行驶和作业过程,其运动行速度不超过农机技术参数中最大速度阈值vmax,通过设置最大速度阈值可以清洗掉漂移的轨迹点,
15、v(pi)≤vmax。
16、进一步地,在本发明的一个实施例中,所述对所述轨迹数据集执行轨迹边界点的提取,包括:
17、s201:读取轨迹点集p中的点pi,在点集p内搜索所有到pi点距离小于2α的所有点,记为点集q;
18、s202:在点集q中选择一点qj,根据pi、qj坐标和半径α,计算经过pi、qj两点的圆心c1、c2;
19、s203:筛选包含在以c1、c2为圆心,α为半径的两个圆内的点集i1、i2,具体包括遍历轨迹点集q中的其他点qk,计算qk与圆心c1、c2的距离d1、d2;若存在d1<α,则qk∈i1;若存在d2<α,则qk∈i2;
20、s204:判断pi是否为边界点;具体包括分别计算点集i1、i2所包含点的数量n1和n2,并进行判断:若存在n1=0或n2=0,表明存在其中一个圆内没有其他点,则点pi是边界点,保存边界点pi;若存在n1≠0且n2≠0,表明两个圆中都有其他点,则pi不是边界点,继续遍历点集q内的其他点;
21、s205:重复s201-s204,直至完成轨迹点集p中所有点的遍历。
22、进一步地,在本发明的一个实施例中,所述依次连接轨迹边界点集生成边界线段集,对所述边界线段集进行平行外扩半个作业幅宽处理,得到外扩线段集,包括:
23、将轨迹边界点集b={b1,b2,…,bm}中的点依次连接,生成边界线段集合l={l1,l2,…,lm};
24、以每一条边界线段li为轴线,向其外侧沿垂直方向平移缓冲距r,生成边界线段li的外扩线段l′i,其中r为:
25、
26、其中,w为农机具的作业幅宽;
27、向两侧延长并依次连接每一段外扩线段l′i,其中l′1与l′m首尾相连;外扩线段依次相交于点mi,形成农田边界点集m={m1,m2,…,mm};
28、将农田边界点集m={m1,m2,…,mm}中的点依次连接,并使其首尾相连,得到封闭的农田边界线。
29、为达上述目的,本发明第二方面实施例提出了一种基于农机作业轨迹的农田边界提取装置,包括以下模块:
30、采集模块,用于通过gnss定位装置、监测终端、作业工况传感器实时记录农机田间运动轨迹;
31、预处理模块,用于对所述运动轨迹进行预处理,得到轨迹数据集;
32、第一提取模块,用于对所述轨迹数据集执行轨迹边界点的提取,得到轨迹边界点集;
33、第二提取模块,依次连接轨迹边界点集生成边界线段集,对所述边界线段集进行平行外扩半个作业幅宽处理,得到外扩线段集;分别延长每段外扩线段,得到交点集即为农田边界点集;依次连接所述农田边界点集,生成封闭的边界线即为农田边界。
34、进一步地,在本发明的一个实施例中,采集模块,用于通过gnss定位装置、监测终端、作业工况传感器实时记录农机田间运动轨迹;
35、预处理模块,用于对所述运动轨迹进行预处理,得到轨迹数据集;
36、第一提取模块,用于对所述轨迹数据集执行轨迹边界点的提取,得到轨迹边界点集;
37、第二提取模块,依次连接轨迹边界点集生成边界线段集,对所述边界线段集进行平行外扩半个作业幅宽处理,得到外扩线段集;分别延长每段外扩线段,得到交点集即为农田边界点集;依次连接所述农田边界点集,生成封闭的边界线即为农田边界。
38、为达上述目的,本发明第三方面实施例提出了一种计算机设备,其特征在于,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时,实现如上所述的一种基于农机作业轨迹的农田边界提取方法。
39、为达上述目的,本发明第四方面实施例提出了一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如上所述的一种基于农机作业轨迹的农田边界提取方法。
40、本发明实施例提出的基于农机作业轨迹的农田边界提取方法,通过利用农机作业监管系统记录的田间作业轨迹数据,实现农田边界的高精度、自动化提取,不仅有助于提升现有农机作业监管系统数据的应用价值,也能满足今后智能农机田间作业的路径规划和效率评估等应用需求,还适用于耕地资源管理及土地规划等领域。
- 还没有人留言评论。精彩留言会获得点赞!