定位方法、装置、全景声定位系统及介质与流程
本公开实施例涉及全景声,更具体地,涉及一种定位方法、一种定位装置、一种全景声定位系统、及一种计算机可读存储介质。
背景技术:
1、近年来,随着人们对生活品质的不断追求,全景声技术即沉浸式环绕声应运而生,全景声技术相比于传统5.1/7.1声道能够提供更精确的3d空间聆听体验。对于全景声系统例如家庭影院全景声系统,通常,在听众位于家庭影院全景声系统中的最佳听音点的情况下,可以获得最佳声场定位效果,其中,该最佳听视点可以是家庭影院全景声系统中沙发的正中间位置,当然,也可以依据房间布局、各音箱设备布置、听众喜好等因素实际测量出最佳听音点。
2、也就是说,为了获得最佳听音效果,用户必须始终位于家庭影院全景声系统中的最佳听音点,如果听众挪动自身位置,便会降低音效效果,并且,若听众原地转向180°,便会导致听众所听到的左右声道声像颠倒,进而降低音效效果。
技术实现思路
1、本公开实施例的一个目的是提供一种定位的新的技术方案。
2、根据本公开实施例的第一方面,提供一种定位方法,应用于全景声定位系统,所述全景声定位系统包括定位子系统和全景声子系统,所述定位子系统包括uwb标签组和至少三个uwb基站,所述uwb标签组包括第一uwb标签和第二uwb标签,所述第一uwb标签和第二uwb标签设置在所述全景声子系统中的听众上,所述方法包括:
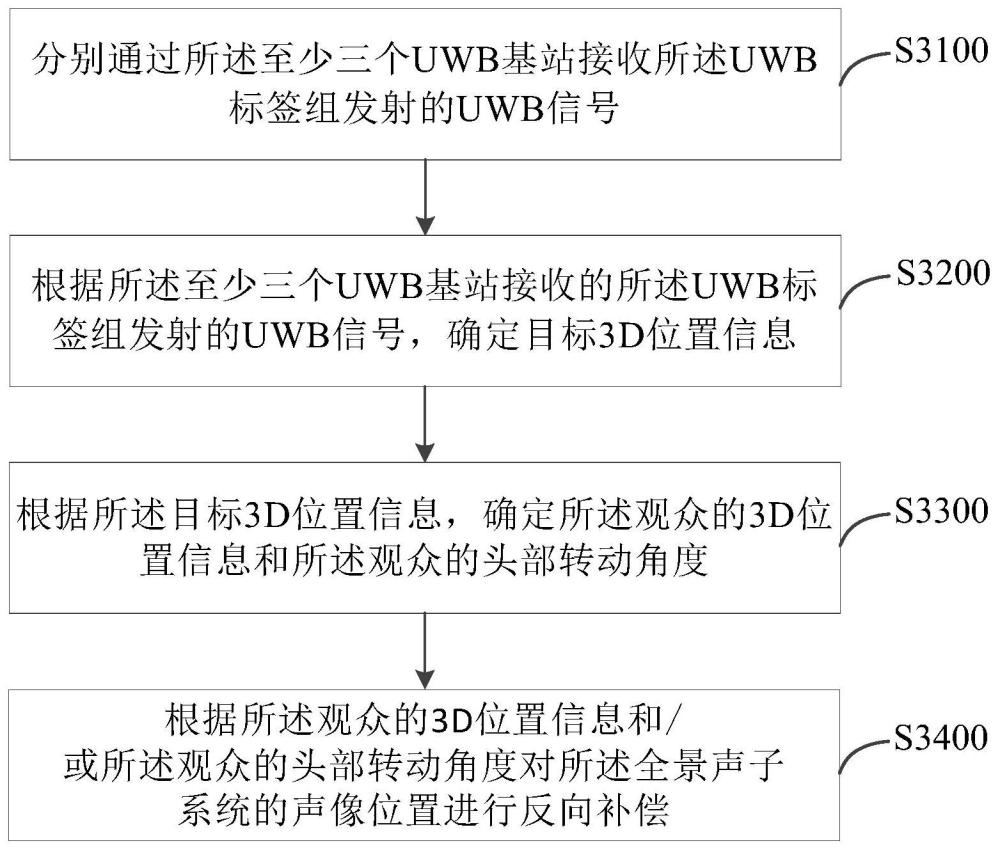
3、分别通过所述至少三个uwb基站接收所述uwb标签组发射的uwb信号;
4、根据所述至少三个uwb基站接收的所述uwb标签组发射的uwb信号,确定目标3d位置信息;其中,所述目标3d位置信息包括所述第一uwb标签的第一3d位置信息和所述第二uwb标签的第二3d位置信息;
5、根据所述目标3d位置信息,确定所述听众的3d位置信息和所述听众的头部转动角度;
6、根据所述听众的3d位置信息和/或所述听众的头部转动角度对所述全景声子系统的声像位置进行反向补偿。
7、可选地,根据所述目标3d位置信息,确定所述听众的头部转动角度,包括:
8、根据所述目标3d位置信息,确定所述第一uwb标签和所述第二uwb标签之间的相对位置信息;
9、根据所述第一uwb标签和所述第二uwb标签之间的相对位置信息,确定所述听众的头部转动角度。
10、可选地,所述根据所述目标3d位置信息,确定所述第一uwb标签和所述第二uwb标签之间的相对位置信息,包括:
11、确定所述第一3d位置信息和所述第二3d位置信息中的其中一个3d位置信息作为基准3d位置信息;
12、获取所述基准3d位置信息与所述第一3d位置信息和所述第二3d位置信息中的另一3d位置信息之间的相对位置信息,作为所述第一uwb标签和所述第二uwb标签之间的相对位置信息。
13、可选地,所述根据所述第一uwb标签和所述第二uwb标签之间的相对位置信息,确定所述听众的头部转动角度,包括:
14、根据所述第一uwb标签和所述第二uwb标签之间的第一水平方向相对位置信息、以及所述第一uwb标签和所述第二uwb标签之间的第二水平方向相对位置信息,确定所述听众的头部转动水平角度;
15、根据所述第一uwb标签和所述第二uwb标签之间的第一水平方向相对位置信息、所述第一uwb标签和所述第二uwb标签之间的第二水平方向相对位置信息、以及第一uwb标签和所述第二uwb标签之间的垂直方向相对位置信息,确定所述听众的头部转动俯仰角度。
16、可选地,所述第一uwb标签和所述第二uwb标签之间的距离大于或等于第一距离阈值;并且,
17、在所述听众佩戴有智能眼镜的情况下,所述智能眼镜包括镜架,所述第一uwb标签和所述第二uwb标签分别设置在所述镜架的第一端和第二端;
18、且/或,在所述听众佩戴有耳机的情况下,所述耳机包括左耳机和右耳机,所述第一uwb标签和所述第二uwb标签分别设置在所述左耳机和所述右耳机。
19、可选地,所述全景声子系统包括多个音箱设备,所述至少三个uwb基站分别设置在所述多个音箱设备中的不同音箱设备上。
20、可选地,所述多个音箱设备包括中置音箱设备、前置左音箱设备和前置右音箱设备,所述中置音箱设备、所述前置左音箱设备和所述前置右音箱设备均设置有所述uwb基站。
21、可选地,所述多个音箱设备包括中置音箱设备和至少两个天空音箱设备,所述中置音箱设备和所述至少两个天空音箱设备均设置有所述uwb基站。
22、可选地,所述多个音箱设备中除所述不同音箱设备之外的其他音箱设备均设置有第三uwb标签,所述方法还包括:
23、分别通过所述至少三个uwb基站接收任意所述第三uwb标签发射的uwb信号;
24、根据所述至少三个uwb基站接收的任意所述第三uwb标签发射的uwb信号,确定对应的所述音箱设备的第三3d位置信息;
25、根据所述第三3d位置信息对所述全景声子系统的声像位置进行反向补偿。
26、根据本公开实施例的第二方面,提供了一种定位装置,应用于全景声定位系统,所述全景声定位系统包括定位子系统和全景声子系统,所述定位子系统包括uwb标签组和至少三个uwb基站,所述uwb标签组包括第一uwb标签和第二uwb标签,所述第一uwb标签和第二uwb标签设置在所述全景声子系统中的听众上,所述装置包括:
27、接收模块,用于分别通过所述至少三个uwb基站接收所述uwb标签组发射的uwb信号;
28、第一确定模块,用于根据所述至少三个uwb基站接收的所述uwb标签组发射的uwb信号,确定目标3d位置信息;其中,所述目标3d位置信息包括所述第一uwb标签的第一3d位置信息和所述第二uwb标签的第二3d位置信息;
29、第二确定模块,根据所述目标3d位置信息,确定所述听众的3d位置信息和所述听众的头部转动角度;
30、补偿模块,用于根据所述听众的3d位置信息和/或所述听众的头部转动角度对所述全景声子系统的声像位置进行反向补偿。
31、根据本公开实施例的第三方面,所述全景声定位系统包括定位子系统和全景声子系统,
32、其中,所述定位子系统包括uwb标签组、至少三个uwb基站和第一电子设备,所述uwb标签组包括第一uwb标签和第二uwb标签,所述第一电子设备包括:存储器,用于存储可执行的计算机指令;处理器,用于根据所述可执行的计算机指令的控制,执行根据以上第一方面所述的定位方法;
33、其中,所述全景声子系统包括第二电子设备和多个音箱设备,所述第一uwb标签和第二uwb标签设置在所述全景声子系统中的听众上,所述至少三个uwb基站分别设置在所述多个音箱设备中的不同音箱设备上,所述第二电子设备包括:存储器,用于存储可执行的计算机指令;处理器,用于根据所述可执行的计算机指令的控制,执行根据以上第一方面所述的定位方法。
34、根据本公开的第四方面,提供了一种计算机可读存储介质,其上存储有计算机指令,所述计算机指令被处理器运行时执行以上第一方面所述的定位方法。
35、本公开实施例的一个有益效果在于,在分别通过至少三个uwb基站接收uwb标签组发射的uwb信号的情况下,会根据至少三个uwb基站接收的uwb信号确定目标3d位置信息,其中,目标3d位置信息包括第一uwb标签的第一3d位置信息和第二uwb标签的第二3d位置信息,这样便可根据目标3d位置信息,确定听众的3d位置信息和听众的头部转动角度,进而根据听众的3d位置信息和/或听众的头部转动角度对全景声子系统的声像位置进行反向补偿,这样,便可在听众所处位置和/或听众头部转动的情况下,能够实现全景声声场动态调整的需求。
36、通过以下参照附图对本说明书的示例性实施例的详细描述,本说明书的其它特征及其优点将会变得清楚。
- 还没有人留言评论。精彩留言会获得点赞!