一种激光测距传感器及其测距方法与流程
本发明属于激光测距,具体涉及一种激光测距传感器及其测距方法。
背景技术:
1、三角测量法广泛应用于各类测距传感器中,参照图1所示,其测距原理是:激光器laser以一定的角度射出一束激光,沿激光方向距离为d的物体反射激光。反射光被激光接收芯片接收形成接收光斑,通过接收光斑的位置x反推出激光器与物体的距离d。
2、这种测距系统的测距性能由对光斑位置x的计算精确性和速度决定。参照图2和图3所示,在传统的三角测距传感器中,往往采用线性激光接收传感器接收激光,并通过重心法计算光斑的中心位置x,因此x的精确性受限于计算光斑两端像素的精确性,并受限于光斑包络的完整性,如图2所示,边界a、b包含了整个光斑计算的起点与终点,不同的取值对中心位置x的计算具有重要的影响。
技术实现思路
1、本发明要解决的技术问题在于克服现有技术中三角测距传感器及其测距方法测距精度较低的缺陷,从而提供一种激光测距传感器及其测距方法。
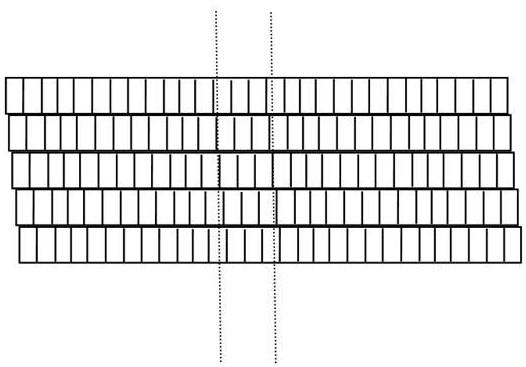
2、一种激光测距传感器,包括激光发射器、激光接收芯片和光线调整组件,所述激光发射器发射竖直长条形的激光光束,所述激光光束经过所述光线调整组件和物体反射在所述激光接收芯片上成像;所述激光接收芯片的感光区域包括多个感光像素,所述感光像素水平方向上整齐排列成感光像素行,多个所述感光像素行在竖直方向上排列形成感光像素阵列,并且每个所述感光像素行与相邻的所述感光像素行在水平方向上偏移固定的距离;并且所述激光光束在所有所述感光像素行上成像形成光斑;
3、所述激光测距传感器测距时扫描每一行所述感光像素行上的每一个感光像素,获取每一行所述感光像素行上每个像素的亮度值,从而获得所述光斑在所述感光像素上的左边界位置和右边界位置;并根据所述左边界位置和右边界位置进行光斑中心位置的计算从而实现测距。
4、进一步的,还包括pcb板,所述pcb板分别与所述激光发射器和所述激光接收芯片电连接,用于控制所述激光发射器发射激光,获取激光接收芯片上的成像数据,并计算测距。
5、进一步的,所述每个所述感光像素行与相邻的所述感光像素行在水平方向上偏移的距离大于所述激光接收芯片的制程并且小于所述感光像素的宽度。
6、进一步的,所述光线调整组件包括设置于所述发射器前端的激光发射透镜和设置于所述激光接收芯片前端的激光接收透镜。
7、进一步的,所述感光像素行设置有4~6行。
8、一种如上述激光测距传感器的测距方法,包括以下步骤:
9、步骤s1:所述激光发射器发射竖直长条形的激光光束,所述激光接收芯片的连续的多行所述感光像素行上成像形成光斑;
10、步骤s2:扫描每一行所述感光像素行上的每一个感光像素,获取每一行所述感光像素行上每个像素的亮度值,并获得所述光斑在所述感光像素上的左右边界像素位置和右边界位置;
11、步骤s3:选择光斑质量最优的一行所述感光像素行,根据所述左边界位置和右边界位置进行光斑中心像素位置的计算。进一步的,
12、进一步的,所述步骤s2中,扫描每一行所述感光像素行上的每一个感光像素,获取每一行所述感光像素行上每个像素的亮度值,并获得所述光斑在所述感光像素上的左右边界像素,包括以下方法:
13、共有n行感光像素行,每个感光像素行具有m个感光像素,并且依次标记为1~m;
14、步骤s2.1:寻找左边界位置,依次从位置下标0~m同时扫描n行感光像素行,当扫描到一个位置下标的所有对应感光像素中,一个第一感光像素具有最高亮度并且向上下两侧的对应感光像素亮度递减,或者位于上下一端具有最高亮度并且向另一侧的对应感光像素亮度递减,则所述第一感光像素的位置为左边界位置,其所在的感光像素行为最优行;
15、步骤s2.2:寻找右边界位置,依次从第一感光像素的位置下标到最右端同时扫描n行感光像素行,当扫描到一个位置下标的所有对应感光像素中,一个第二感光像素具有最高亮度并且向上下两侧的对应感光像素亮度递减,或者位于上下其中一端具有最高亮度并且向另一侧的对应感光像素亮度递减,则所述第二感光像素的位置为右边界位置。
16、进一步的,所述步骤s3中,选择光斑质量最优的一行所述感光像素行,包括以下方法:去除有过曝像素值的行、去除有亮度值不足的行、选择整体明亮度最高的行。
17、进一步的,所述步骤s3中,进行光斑中心像素的计算,包括以下方法:通过重心法计算光斑的中心:。
18、有益效果:本发明设计了一种激光测距传感器及其测距方法,通过在激光接收芯片上设置固有固定相邻偏移的感光像素行,并通过激光发射器发射长条形的激光光束在激光接收芯片上形成穿过多行感光像素行的光斑,突破了像素尺寸对测距精度的限制,从而有效提升了测距精度,实现了高精度的基于三角测量法的激光测距传感器的测距方法。
技术特征:
1.一种激光测距传感器,包括激光发射器、激光接收芯片和光线调整组件,其特征在于,所述激光发射器发射竖直长条形的激光光束,所述激光光束经过所述光线调整组件和物体反射在所述激光接收芯片上成像;所述激光接收芯片的感光区域包括多个感光像素,所述感光像素水平方向上整齐排列成感光像素行,多个所述感光像素行在竖直方向上排列形成感光像素阵列,并且每个所述感光像素行与相邻的所述感光像素行在水平方向上偏移固定的距离;并且所述激光光束在所有所述感光像素行上成像形成光斑;
2.根据权利要求1所述的一种激光测距传感器,其特征在于,还包括pcb板,所述pcb板分别与所述激光发射器和所述激光接收芯片电连接,用于控制所述激光发射器发射激光,获取激光接收芯片上的成像数据,并计算测距。
3.根据权利要求1所述的一种激光测距传感器,其特征在于,所述每个所述感光像素行与相邻的所述感光像素行在水平方向上偏移的距离大于所述激光接收芯片的制程并且小于所述感光像素的宽度。
4.根据权利要求1所述的一种激光测距传感器,其特征在于,所述光线调整组件包括设置于所述发射器前端的激光发射透镜和设置于所述激光接收芯片前端的激光接收透镜。
5.根据权利要求1所述的一种激光测距传感器,其特征在于,所述感光像素行设置有4~6行。
6.一种如权利要求1-5任一项所述的激光测距传感器的测距方法,其特征在于,包括以下步骤:
7.根据权利要求6所述一种激光测距传感器的测距方法,其特征在于,所述步骤s2中,扫描每一行所述感光像素行上的每一个感光像素,获取每一行所述感光像素行上每个像素的亮度值,并获得所述光斑在所述感光像素上的左右边界像素,包括以下方法:
8.根据权利要求6所述的一种激光测距传感器的测距方法,其特征在于,所述步骤s3中,获取所述感光像素行的左边界位置和右边界位置,进行光斑中心位置的计算,包括以下方法:通过重心法计算光斑中心位置:,其中,a为左边界位置,b为右边界位置,为位置i的实际位置。
技术总结
本发明属于激光测距技术领域,具体涉及一种激光测距传感器及其测距方法。本发明设计的一种激光测距传感器及其测距方法,通过在激光接收芯片上设置固有固定相邻偏移的感光像素行,并通过激光发射器发射长条形的激光光束在激光接收芯片上形成穿过多行感光像素行的光斑,突破了像素尺寸对测距精度的限制,从而有效提升了测距精度,实现了高精度的基于三角测量法的激光测距传感器的测距方法。
技术研发人员:王品,龙杰,何英,吕星宏
受保护的技术使用者:武汉市品持科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!