一种协同考虑行车风险和通信负载的路车智能融合感知方法
本发明涉及车路协同环境感知的,特别涉及一种协同考虑行车风险和通信负载的路车智能融合感知方法。
背景技术:
1、环境感知对于自动驾驶至关重要,它是自动驾驶系统的核心能力之一。它通过感知周围环境中的障碍物,使自动驾驶车辆能够理解其所处的场景并做出适当的决策。为满足自动驾驶行为决策的需求,诸多传感器技术已被应用于自动驾驶车辆的环境感知系统,包括雷达、相机和激光雷达。其中,激光雷达通过发射激光束,并测量激光束的飞行时间生成点云数据,具有数据分辨率高、检测区域广以及光照依赖度低的特性。另外,近年来三维目标检测和点云分割算法的逐渐成熟,从点云数据可以实现障碍物三维位姿、轮廓信息的精准提取。凭借以上优势,激光雷达已成为自动驾驶环境感知系统中最为广泛使用的感知设备之一。
2、当下,自动驾驶环境感知系统中存在诸多问题难以解决。其一,成本高昂:激光雷达等高端传感器的制造涉及到复杂的光学和机械设计,以及高精度的零部件制造,这限制了规模化生产,使得成本相对较高。其二,视野受限:由于障碍物遮挡以及传感器视角和工作原理的限制,即使距离车辆较近的区域,感知盲区也不可避免的存在,产生安全隐患。另外,各个传感器存在感知范围上限,超过感知范围的物体对于车辆将是完全不可知的,这也会影响高速情况下的车辆决策的安全可靠性。
3、为克服以上问题,车路协同技术应运而生,在路侧部署感知、计算设备,借助v2x(vehicle-to-everything)通信技术实现多个交通参与者间感知信息的共享,从而解决视野受限和单车成本高昂的问题。学者们提出了多种基于v2v(vehicle-to-vehicle)和v2i(vehicle-to-infrastructure)通信的数据共享框架,以从多个视角实现全局的环境感知。这些研究中主要采用了三种数据融合策略:数据级融合、特征级融合和目标级融合。在目标级融合框架中,每个具有通信能力的车辆在网络中共享的自己的感知结果,也即车辆、行人的位置、姿态。这使得目标级融合方案对通信网络的开销较小,但由于噪声干扰和误检测,其对于感知性能提升有限。特征级融合则共享经过神经网络提取的特征。这种方法可在通信消耗与感知准确性之间取得良好平衡,并且可实现多模传感器数据处理,因而受到广泛关注。然而,特征级融合要求网络中车辆采用统一的感知模型,不同感知模型所提取特征难以互通,这使得特征级融合方案的应用受限。数据级融合则共享原始传感器数据。即使各自动驾驶车辆部署了各自不同的感知模型,传感器数据依然可以通用。此外,由于直接共享原始感知数据,这种方法可以实现最佳的感知性能。但受限带于宽资源,高通信量下的数据级融合难以实现。在有限的带宽资源下,大量传感数据的通信将导致通信网络严重延迟,从而产生不适合决策制定的低性能感知结果。
技术实现思路
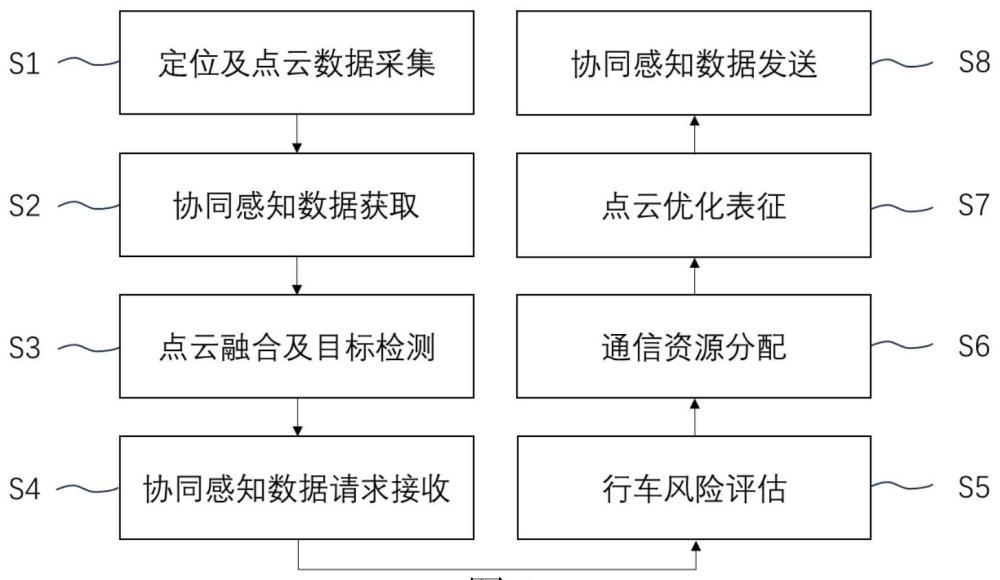
1、针对现有技术中存在的不足之处,本发明的目的是提供一种协同考虑行车风险和通信负载的路车智能融合感知方法,针对不同通信资源约束下的感知任务,实现了车路感知资源之间的高效共享,为自动驾驶车辆的行为决策提供了可靠的环境感知数据。为了实现根据本发明的上述目的和其他优点,提供了一种协同考虑行车风险和通信负载的路车智能融合感知方法,包括感知系统,该系统包括车端平台、与车端平台信号连接的路侧平台、与车端平台或路侧平台通信的云端平台、定位定姿设备及点云采集设备,车端平台包括网联车辆,该网联车辆包括感知单元、通信单元以及计算单元;路侧平台包括立杆与龙门架的道路基础设施,部署感知单元、通信单元以及计算单元;云端平台包括云服务器与云数据库,其中还包括计算单元与存储单元,其特征在于,该方法包括以下步骤:
2、s1、通过感知单元采集具有时间及位姿标签的点云数据;
3、s2、通信单元通过路车通信网络从其他系统获取协同感知数据;
4、s3、计算单元融合点云数据并进行三维目标检测;
5、s4、通信单元通过路车通信网络接收其他系统的协同感知数据请求;
6、s5、计算单元基于安全场理论对感知区域内的行车风险进行评估;
7、s6、计算单元综合考虑行车风险与通信负载,对系统可用的通信资源在接收到的数据请求间进行分配;
8、s7、由计算单元按照步骤s6的资源分配方案,对感知单元采集到的点云进行优化表征;
9、s8、由通信单元按照步骤s6的资源分配方案,向请求协同感知数据的各系统发送协同感知数据。
10、优选的,步骤s5具体包括以下步骤:
11、s51、定义感知单元坐标系下安全场计算基准点、安全场计算分辨率、安全场计算范围;
12、s52、定义感知单元直角坐标系坐标(x,y,z)与椭球坐标系坐标间的变换关系;
13、s53、按s51中定义的安全场计算基准点、安全场计算分辨率、安全场计算范围,生成感知单元坐标系下安全场计算点集h;
14、s54、对于安全场计算点集h中的每一个安全场计算点按s53中定义的坐标变换关系,计算所述安全场计算点直角坐标(x,y,z)对应椭球坐标
15、s55、对于目标级环境感知数据集中的每一个检测到的目标车辆χ,在s53中定义的安全场计算点集上进行安全场计算;
16、s56、叠加目标级环境感知数据集中每一个检测到的目标车辆产生的安全场,得到总和安全场;
17、s57、对总和安全场进行归一化处理,得到标准总和安全场矩阵f;
18、s58、根据标准总和安全场矩阵f,在步骤s4中所述生成协同感知数据请求集内添加行车风险评估项,得到带有行车风险评估的协同感知数据请求集
19、优选的,步骤s55具体包括以下步骤:
20、s551、定义安全场计算参数k1,k2;
21、s552、定义并计算目标车辆χ的虚拟质量mχ;
22、s553、定义并计算目标车辆χ处的路况影响rχ,影响因素包括但不限于目标车辆附近区域的道路附着系数、道路坡度、道路曲率和空气能见度;
23、s554、对于s53中所述安全场计算坐标点集hχ中的每一个安全场计算坐标点在感知单元直角坐标系中的坐标(x,y,z)以及s54中所述的其在感知单元椭球坐标系中的坐标按式2及式3计算目标车辆χ产生的安全场在该处的场强值;
24、
25、
26、其中,θ代表物体χ与点(x,y)连线与目标车辆χ速度向量vχ间的夹角。
27、优选的,步骤s58具体包括以下步骤:
28、s581、对步骤s4中的协同感知数据请求集r中每个系统发送的在步骤s1中的全局坐标系内的定位数据ti进行坐标变换,得到各请求数据的系统位置在本系统的感知单元坐标系中的坐标;
29、
30、s582、在s53中所述的安全场计算点集h中查询距离请求数据系统的位置接近的点的索引pk,并取该点的安全场强值作为该系统的行车风险评估结果;
31、s583、组合所有请求数据系统的行车风险评估结果,生成各请求协同感知数据的系统的行车风险评估集。
32、优选的,步骤s6具体包括以下步骤:
33、s61、通信资源包括:可用子帧数量l、子频道数量k、子帧宽度t、子频道宽度b;定义可用资源序列q=[cit|ci=b·log(1+sinri),i=1,2,...,lk],其中sinri为信道i的信噪比;
34、s62、计算步骤s1中的感知单元采集点云数据的大小|xs|;
35、s63、系统部署前通过仿真实验确定目标点云数据压缩率kt;
36、s64、定义压缩率倍增系数λ、定义资源分配矩阵并赋初值定义点云数据压缩率向量并赋初值及定义通信资源需求并赋初值s=|xs|kt;定义剩余可分配资源大小并赋初值r=∑iqi;
37、s65、按s58中所述的带有行车风险评估的协同感知数据请求集中的行车风险项对协同感知数据请求集内各系统进行排序,得到协同感知数据请求序列rs,长度ne;
38、s66、从步骤s61中的资源序列中向协同感知数据请求序列中各系统分配通信资源按序分配资源,直到资源分配完毕r≤0或所有需求得到满足;
39、s67、记录最终点云数据的压缩率向量k以及资源分配矩阵x。
40、优选的,步骤s63具体包括以下步骤:
41、s631、建立仿真平台,包括交通流仿真、传感器仿真及车辆动力学仿真模块;
42、s632、根据应用需求,标定仿真平台内各模型参数,建立仿真场景,在仿真平台中搭建步骤s1的感知单元;具体包括:建立场景地图、配置车辆参数、配置传感器参数、设置场景交通流;
43、s633、设置固定采样率按步骤s7中的对仿真中感知单元采集到的点云数据进行采样;
44、s634、根据步骤s3中定义融合仿真点云数据并进行三维目标检测的方法;
45、s635、运行仿真,通过仿真平台收集场景中各目标车辆的位置真值,收集s3所述系统检测目标车辆位置数据
46、s636、根据步骤s634中所述固定采样率,步骤s632中所述仿真感知单元采集到点云数据大小以及应用需求中的数据传输带宽限制计算数据传输时延;
47、s637、根据数据传输时延对目标车辆的位置真值进行时延补偿,并与仿真平台收集场景中各目标车辆的位置真值进行比较,计算平均时延补偿的定位误差;
48、s638、更新固定采样率,重复步骤s634-s638,对平均定位误差进行优化,直到固定采样率或平均定位误差收敛。
49、优选的,步骤s67具体包括以下步骤:
50、s671、定义目标系统索引i,指向s65中所述协同感知数据请求序列的第一个系统;
51、s672、定义通信资源索引j,指向s61中所述可用资源序列的第一个资源块;
52、s673、若资源分配完毕r≤0,退出资源分配程序;
53、s674、若剩余通信资源大小不满足要求r<s,按s64中所述压缩率倍增系数增加压缩率s←s/λ;
54、s675、定义已分配给索引i所指系统通信资源并赋初值p=0;
55、s676、将索引j所指资源分配给索引i所指系统xi,j←1;
56、s677、更新剩余资源r←r-qj;更新已分配资源p←p+qj;
57、s678、索引j指向下一个资源块j←j+1;
58、s679、重复步骤s6706-s6708,直到已分配资源满足需求q≥s;
59、s6710、计算索引i所指系统实际点云数据压缩率ki←(∑jqjxij)/|xs|;
60、s6711、索引i指向下一个系统i←i+1
61、s6712、重复步骤s6703-s6711,直到目标系统请求均得到满足i>nr。
62、本发明与现有技术相比,其有益效果是:通过基于安全场的点云优化表征方法考虑了行车风险,在保留对于感知任务至关重要的点云信息的基础上,显著减少了融合感知系统中数据共享所需的通信资源消耗;本发明采用仿真实验的方法标定目标点云数据压缩率,在通信延迟估计的基础上,引入了一种时延补偿的定位误差的计算,用于评估融合感知的准确性;本发明综合考虑行车风险与通信负载,在点云数据大小与感知准确性之间取得均衡,系统在不同带宽限制的场景下自适应为请求数据的系统配置通信资源和点云压缩率,从而提高融合感知系统的性能。
- 还没有人留言评论。精彩留言会获得点赞!