基于结构光的三维测量方法、装置、电子设备及存储介质
本发明涉及三维重建,更具体地说,涉及一种基于结构光的三维测量方法、装置、电子设备及存储介质。
背景技术:
1、三维轮廓测量方法可以低成本获得到精确度高的结构简单点云数据。所得的点云数据,可以帮助目标物体进行三维重建,辅助计算机视觉技术。三维模型重构也是三维智能信息处理等领域的核心课题之一,在数字城市、智能交通、智能制造、文物保护、测量测绘等领域有着广阔的应用前景。目前,三维模型重建的难点在于点云的深度信息的精确获取。传统三维轮廓测绘法通过投射多幅调制的结构光图,可以获得图像某点的绝对相位。通过改变调制方法,投射光图的数量需求降低,获取的相位反映出的高度信息逐渐达到很高的精度。但由于预先设定的各种投影仪-摄像机模型中,投影仪和摄像机摆放方式变化,相位到高度的映射关系发生变化。又因装置摆放位置关系与预期建模存在位置偏差,导致测量存在误差,需要后续手动校准。
技术实现思路
1、本发明要解决的技术问题在于,提供一种基于结构光的三维测量方法、装置、电子设备及存储介质,可以解决现有技术中手动摆放识别装置,测量距离存在误差,需要调整参数校准的技术问题。
2、本发明解决其技术问题所采用的技术方案是:构造1、一种基于结构光的三维测量方法,其特征在于,包括以下步骤:
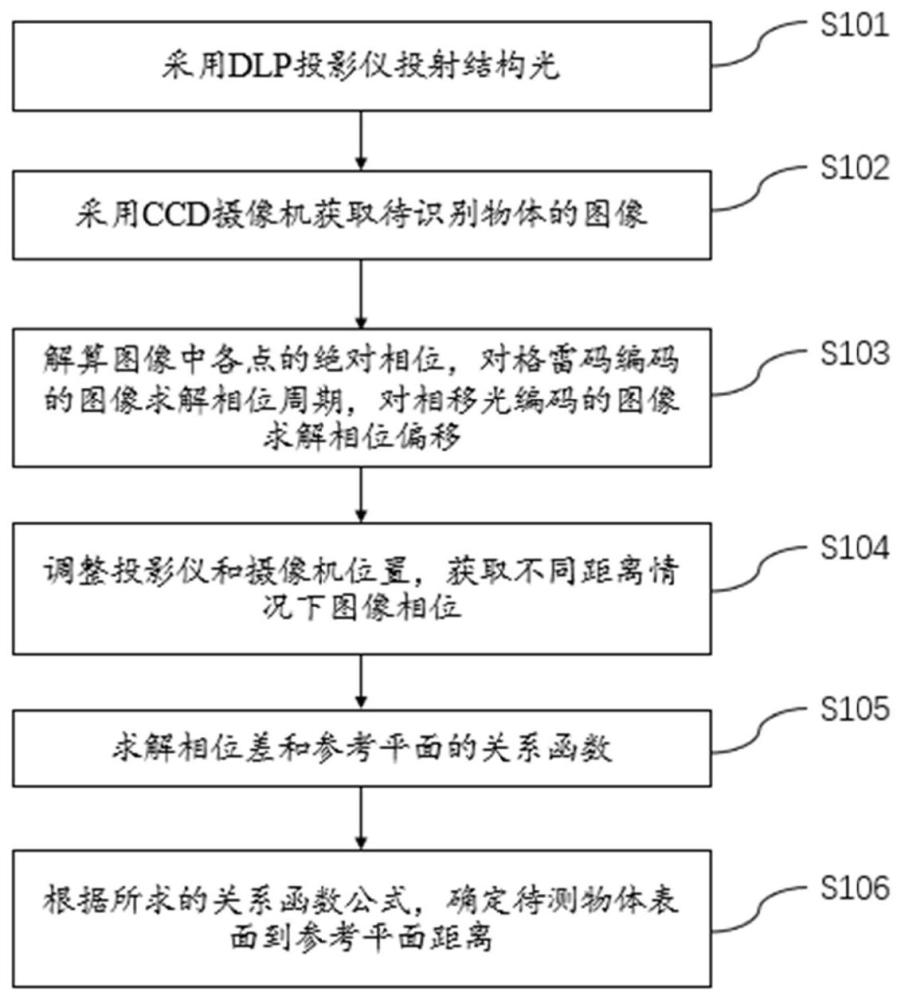
3、s101、采用dlp投影仪投射结构光;
4、s102、采用ccd摄像机获取待识别物体的图像;
5、s103、解算图像中各点的绝对相位,对格雷码编码的图像求解相位周期,对相移光编码的图像求解相位偏移;
6、s104、调整投影仪和摄像机位置,获取不同距离情况下图像相位;
7、s105、求解相位差和参考平面的关系函数;
8、s106、根据所求的关系函数公式,确定待测物体表面到参考平面距离。
9、按上述方案,在所述步骤s102中,获取待识别物体的图像之后,还包括以下步骤:
10、s201、对采集图像进行灰度化处理,计算图像的灰度阈值;
11、s202、根据阈值对图像二值化;
12、s203、判断超出投影边界的区域作计算时去除该区域;
13、s204、根据投影纯黑和纯白图像时的采集图像,判断物体在投影光源中遮挡的阴影区域。
14、按上述方案,在所述步骤s103中,解算图像中各点的绝对相位的方法包括以下步骤:
15、s301、采用每两位取异或的方式进行格雷码转换二进制的计算,求解格雷码编码的图像相位周期;
16、s302、基于四步相移的相位值,求解正弦光栅编码的图像相位偏移;
17、s303、根据相位周期和相位偏移,解算图像中各点的绝对相位。
18、按上述方案,在所述步骤s105中,求解相位差和参考平面的关系函数的方法包括以下步骤:
19、s401、求得滑动平面的相位和参考平面的相位的相位差;
20、s402、根据滑动平面的位移高度和相位差值标定系统中各参数;
21、s403、代入至二次拟合函数以便快速求解。
22、按上述方案,在所述步骤s101中,采用dlp投影仪投射结构光的方法包括如下步骤:
23、对投射光进行结构化编码的处理,对一部分投射光使用格雷码编码,对一部分投射光使用四步正弦光编码;
24、将投影图形编辑成固件烤录进dlp投影仪,供后续若干次切换投射图像;
25、根据投影区域在背景板上的范围,调整投影仪位姿,将投影仪固定在滑轨一侧,接usb连接线供计算机进行投影操作。
26、按上述方案,在所述步骤s102中,采用ccd摄像机获取待识别物体的图像,包括:
27、将ccd摄像机固定在滑轨中相对于投影仪的另一侧,使用型材将投影仪和摄像机进行连接,细微调整至两者镜头光心连线与参考背景板尽量平行;
28、保持摄像机和投影仪的绝对世界坐标位置不变,分别获取包含投影光的背景板图像和待测物体的图像,以及使用棋盘格获取系统的内外参标定图像。
29、按上述方案,所述调整投影仪和摄像机的位置,获取不同距离情况下相位,包括:
30、通过精密刻度尺标记位置,使得滑轨每次按一个方向移动10mm,一共移动三次;
31、获取三种距离下只包含背景板不包含待测物体的投影图像;
32、根据各图像光栅强度,解算出各点绝对相位,与先前参考平面相位相比求出相位差。
33、按上述方案,求解相位差和物体高度的关系函数,包括:
34、通过三次相位差值标定该系统中高度相位关系函数的参数值;
35、将参数带入公式,求解相位差和物体高度的关系函数。
36、按上述方案,确定待测物体表面到参考平面距离,包括:
37、将待测物体光栅图中求出的绝对相位与先前参考平面相位相比求出相位差;
38、根据高度相位关系函数公式,求出待测物体表面各点到参考平面距离。
39、本发明还提供了一种基于结构光的三维测量装置,包括投影仪投影模块、摄影机图像获取模块、计算机解算相位模块、滑轨模块和待测物拍摄模块;
40、所述投影仪投影模块用于投影结构光;
41、所述摄影机图像获取模块用于采集物体或者背景板在投影光下的图像;
42、所述计算机解算相位模块用于预处理采集图像,以及解算图像相位,求得标定参数系数,求解待测物体的表面高度;
43、所述滑轨模块用于连接投影仪和照相机,使两者一并相对于背景板平面于三维空间做多个垂直移动,进行系统的参数标定;
44、所述待测物拍摄模块用于可旋转平台用于支撑待测物体,旋转以进行物体多方向表面的高度采集,支持后续三维建模。
45、按上述方案,所述背景板是一个不透明不反光的白色刚性板材,垂直于滑轨固定在型材上。
46、本发明还提供了一种电子设备,包括处理器和存储器;所述存储器上存储有可被所述处理器执行的计算机可读程序;所述处理器执行所述计算机可读程序时实现所述的结构光三维测量方法中的步骤。
47、本发明还提供了一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有一个或者多个程序,所述一个或者多个程序可被一个或者多个处理器执行,以实现所述的结构光三维测量方法中的步骤。
48、实施本发明的基于结构光的三维测量方法、装置、电子设备及存储介质,具有以下有益效果:
49、本发明首先采用dlp投影仪投射结构光;随后采用ccd摄像机获取待识别物体的图像;随后解算图像中各点的绝对相位,对格雷码编码的图像求解相位周期,对相移光编码的图像求解相位偏移;随后调整投影仪和摄像机的位置,获取不同距离的图像相位;随后求解相位差和物体高度的关系函数;最后根据所求的关系函数公式,确定待测物体表面到参考平面距离。本发明解决了由于预先设定的各种投影仪-摄像机模型中,投影仪和摄像机摆放方式变化,相位到高度的映射关系发生变化。又因手动摆放不准确,摄像机和投影仪与参考平面之间位置关系不符合预期建模,导致测量存在误差,需要后续手动校准的问题。
- 还没有人留言评论。精彩留言会获得点赞!