一种基于车辆期望速度的离线时间检测方法、系统及介质与流程
本发明涉及无人驾驶车辆,尤其是涉及一种基于车辆期望速度的离线时间检测方法、系统及介质。
背景技术:
1、随着自动驾驶技术的不断发展,当车辆在行驶过程中,无人驾驶车辆由于电量不足或系统出现故障处于离线状态,或者正要处于离线状态,这种状态下,无人驾驶车辆继续运行下去,会给车辆带来危险或会给其他车辆造成困扰,如何对无人驾驶车辆进入离线状态或正要进入离线状态进行检测,成为我们亟待解决的问题。
2、现有技术中,专利(申请号:201610143661.9)公开了用户离线检测方法和用户离线检测系统,该方法包括:群组内每一个成员对应的移动终端间隔第一预设时间发送心跳数据包至服务器。服务器每接收到一移动终端发送的心跳数据包时,为发送心跳数据包的移动终端创建用户记录且开始计时,用户记录包括过期时间,过期时间=第一当前时间+第二预设时间,第二预设时间大于第一预设时间。若服务器在过期时间内,接收到发送心跳数据包的移动终端发送的操作指令,获取第二当前时间并利用第二当前时间更新过期时间,过期时间=第二当前时间+第二预设时间。客户端上网使用流量是有限制的,尤其是需要使用服务端多个服务的情况下,可能会造成流量超出,与此同时,对于车辆是否离线的判断过程不完善。
3、现有技术中,专利(申请号:201410467634.8)公开了公交车辆离线检测方法,步骤1,在规划的公交线路上设置多个等距离的特殊坐标点,两个特殊坐标点的距离为d;步骤2,在各个特殊坐标点上设一个与经纬度平行的正方形;步骤3,在车载控制器上下载各个特殊坐标点及标示信息,并下载特殊坐标点;步骤4,车载控制器检测车载gps的坐标信息;步骤5,优先判断当前站点附近的特殊坐标点,如不匹配,则判断下一个特殊坐标点;步骤6,当车载gps坐标信息落入特殊坐标点的正方形内时,则认为在线;否则认为车辆离线。该专利中对车辆离线的检测只利用到了坐标点的判断,比较片面,且判断不准确。
技术实现思路
1、鉴于以上现有技术的不足,本发明提供了一种基于车辆期望速度的离线时间检测方法、系统及介质,不仅能够对车辆的离线时间进行准确的检测,而且检测过程适用于多种且复杂的环境,适用面广,有利于推广使用。
2、为了实现上述目的及其他相关目的,本发明提供的技术方案如下:
3、一种基于车辆期望速度的离线时间检测方法,所述方法包括:
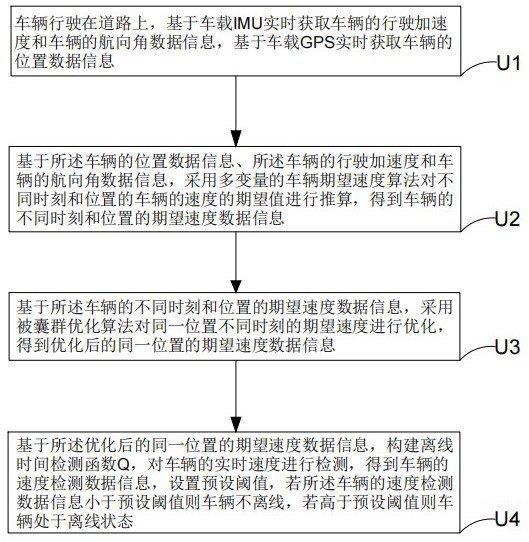
4、u1.车辆行驶在道路上,基于车载imu实时获取车辆的行驶加速度和车辆的航向角数据信息,基于车载gps实时获取车辆的位置数据信息;
5、u2.基于所述车辆的位置数据信息、所述车辆的行驶加速度和车辆的航向角数据信息,采用多变量的车辆期望速度算法对不同时刻和位置的车辆速度的期望值进行推算,得到车辆的不同时刻和位置的期望速度数据信息;
6、u3.基于所述车辆的不同时刻和位置的期望速度数据信息,采用被囊群优化算法对同一位置不同时刻的期望速度进行优化,得到优化后的同一位置的期望速度数据信息;
7、u4.基于所述优化后的同一位置的期望速度数据信息,构建离线时间检测函数q,对车辆的实时速度进行检测,得到车辆的速度检测数据信息,设置预设阈值,若所述车辆速度检测数据信息小于预设阈值则车辆不离线,若高于预设阈值则车辆处于离线状态。
8、进一步的,在步骤u2中,所述采用多变量的车辆期望速度算法对不同时刻和位置的车辆速度的期望值进行推算包括:
9、u21.基于所述车辆的位置数据信息、所述车俩的行驶加速度和车辆航向角数据信息,建立车辆的多元概率密度函数g,
10、
11、x=[xt,yt,at,θt,t],
12、
13、其中,(xt,yt)为t时刻的车辆的位置数据信息,at为t时刻的车辆的加速度数据信息,θt为t时刻的车辆的航向角数据信息,x为车辆的状态数据数组,λ为δt时间内的车辆的状态均值数据数组,σ为车辆的协方差矩阵数据信息,为δt时间内的车辆的位置均值数据信息,为δt时间内的车辆的加速度均值数据信息,为δt时间内的车辆的航向角均值数据信息;
14、u22.基于所述车辆的多元概率密度函数g,建立车辆不同时刻和位置的车辆速度的期望值函数h,
15、
16、其中,x为车辆的状态数据数组,xδt为车辆在δt时间内的车辆的状态数据数组的变化量;
17、u23.基于所述车辆不同时刻和位置的车辆速度的期望值函数h,得到车辆的不同时刻和位置的期望速度数据信息。
18、进一步的,所述车辆协方差矩阵数据信息σ为,σ=e[(x-λ)(x-λ)t],
19、其中,x为车辆的状态数据数组,λ为δt时间内的车辆的状态均值数据数组。
20、进一步的,所述δt时间内的车辆的位置均值数据信息为,
21、所述δt时间内的车辆的加速度均值数据信息为,
22、
23、所述δt时间内的车辆的航向角均值数据信息为,
24、
25、其中,ɑi为不同时刻的车辆的位置权重系数,(xi,yi)为i时刻的车辆的位置数据信息,ai为i时刻的车辆的加速度数据信息,θi为i时刻的车辆的航向角数据信息,βi为不同时刻的车辆的加速度的权重系数,δi为不同时刻的车辆的航向角的权重系数。
26、进一步的,在步骤u3中,所述采用被囊群优化算法对同一位置不同时刻的期望速度进行优化包括:
27、u31.基于所述车辆的不同时刻和位置的期望速度数据信息,对囊群的种群进行初始化,设置种群参数和边界条件,得到初始化的囊群的种群数据信息;
28、u32.基于所述初始化的囊群的种群数据信息,建立种群的适应度函数m,
29、
30、其中,vt为t时刻的车辆的期望速度,v(x,y)为不同位置的车辆的的期望速度,得到囊群个体的适应度值数据信息;
31、u33.基于所述囊群个体的适应度值数据信息,建立囊群个体的位置更新函数l,
32、
33、其中,c为自适应权重值,得到囊群个体的位置更新数据信息;
34、u34.基于所述囊群个体的位置更新数据信息,对囊群种群进行优化,得到优化后的同一位置的期望速度数据信息。
35、进一步的,所述囊群个体的位置更新函数l(t),
36、
37、其中,m(t)max为t时刻种群的适应度函数最大值,m(t)min为t时刻种群的适应度函数最小值,c为自适应权重值。
38、进一步的,所述自适应权重值c为,
39、
40、其中,δt为车辆不同时刻的时间间隔值,t为车辆的时间。
41、进一步的,在步骤u4中,所述构建离线时间检测函数q为,
42、
43、其中,v期为优化后的同一位置的期望速度数据信息,v0为车辆的速度评判因子。
44、为了实现上述目的及其他相关目的,本发明还提供了一种基于车辆期望速度的离线时间检测系统,包括计算机设备,该计算机设备被编程或配置以执行任意一项所述的基于车辆期望速度的离线时间检测方法的步骤。
45、为了实现上述目的及其他相关目的,本发明还提供了一种计算机可读存储介质,该计算机可读存储介质上存储有被编程或配置以执行任意一项所述的基于车辆期望速度的离线时间检测方法的计算机程序。
46、本发明具有以下积极效果:
47、1.本发明通过采用多变量的车辆期望速度算法对不同时刻和位置的车辆速度的期望值进行推算,得到车辆的不同时刻和位置的期望速度数据信息,并结合采用被囊群优化算法对同一位置不同时刻的期望速度进行优化,不仅能够准确得到车辆的期望速度,而且针对同一位置不同时刻的期望速度进行分析进一步提高了车辆的期望速度的准确度。
48、2.本发明通过构建离线时间检测函数q,对车辆的实时速度进行检测,检测过程快捷,及时性高,能够对无人驾驶车辆的状态进行及时反馈,降低无人驾驶车辆事故发生率,提高安全性,与此同时,能够适用于多种且复杂的环境,适用面广,有利于推广使用。
- 还没有人留言评论。精彩留言会获得点赞!