一种自动驾驶激光雷达混合标定的方法、系统及介质与流程
本发明涉及自动驾驶,尤其是涉及一种自动驾驶激光雷达混合标定的方法、系统及介质。
背景技术:
1、随着自动驾驶技术的不断发展,系统的提升离不开传感器的各个参数的标定,其中,激光雷达的内参已经确定,而激光雷达的外参的标定是激光雷达自身关系与我们所需坐标系之间的差值,从而在车辆坐标系下得到激光雷达的检测结果,方便后续的感知计算,从而如何提高外参标定的准确性,成为我们研究的重要课题。
2、现有技术中,专利(申请号:202110337971.5)公开了一种激光雷达标定方法、激光雷达标定装置及智能设备,所述方法包括:获取第一激光雷达发射的第一激光束对应的点云数据和第二激光雷达发射的第二激光束对应的点云数据,所述第一激光雷达和所述第二激光雷达设置在同一智能设备上,所述第一激光束和所述第二激光束投射至标定物体的同一目标点;根据所述第一激光束对应的点云数据和所述第二激光束对应的点云数据确定标定值;根据所述标定值对所述第一激光雷达和所述第二激光雷达进行联合标定,虽然对激光雷达的参数进行联合标定,但是缺乏标定效率和准确性的提高。
技术实现思路
1、鉴于以上问题,本发明提供了一种自动驾驶激光雷达混合标定的方法、系统及介质,不仅能够提高激光雷达外参标定的效率,而且通过主激光雷达和从激光雷达的混合标定,提高了参数标定的准确性。
2、为了实现上述目的及其他相关目的,本发明提供的技术方案如下:
3、一种自动驾驶激光雷达混合标定方法,所述方法包括:
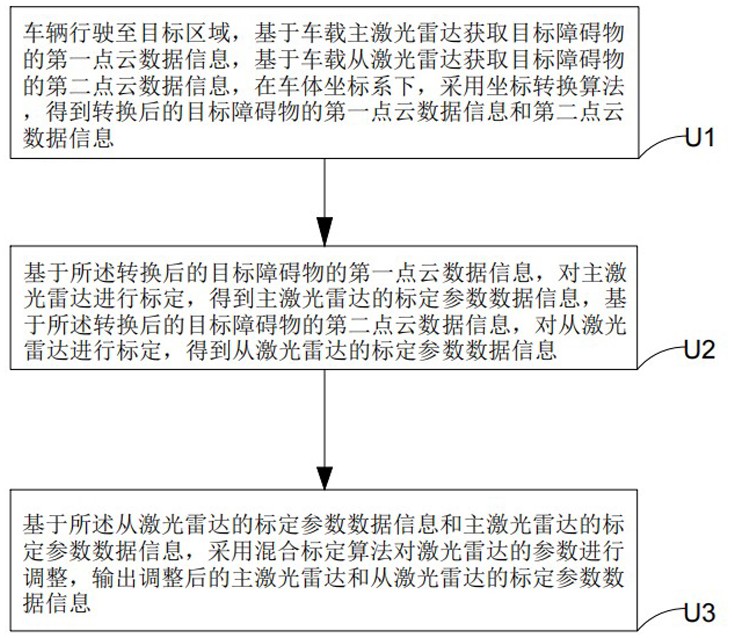
4、u1.车辆行驶至目标区域,基于车载主激光雷达获取目标障碍物的第一点云数据信息,基于车载从激光雷达获取目标障碍物的第二点云数据信息,在车体坐标系下,采用坐标转换算法,得到转换后的目标障碍物的第一点云数据信息和第二点云数据信息;
5、u2.基于所述转换后的目标障碍物的第一点云数据信息,对主激光雷达进行标定,得到主激光雷达的标定参数数据信息,基于所述转换后的目标障碍物的第二点云数据信息,对从激光雷达进行标定,得到从激光雷达的标定参数数据信息;
6、u3.基于所述从激光雷达的标定参数数据信息和所述主激光雷达的标定参数数据信息,采用混合标定算法对激光雷达的参数进行调整,输出调整后的主激光雷达和从激光雷达的标定参数数据信息。
7、进一步的,在步骤u1中,所述采用坐标转换算法,得到转换后的目标障碍物的第一点云数据信息和第二点云数据信息包括:
8、u11.基于所述目标障碍物的第一点云数据信息和所述目标障碍物的第二点云数据信息,建立坐标转换函数f,
9、,
10、其中,i=1,2,θ为激光雷达坐标系和车体坐标系的旋转角,(x1,y1,z1)为目标障碍物的第一点云数据信息,(x2,y2,z2)为目标障碍物的第二点云数据信息;
11、u12.基于所述坐标转换函数f,得到转换后的目标障碍物的第一点云数据信息和第二点云数据信息。
12、进一步的,所述激光雷达坐标系和车体坐标系的旋转角θ的取值范围为(0,90°)或(90°,180°)。
13、进一步的,在步骤u2中,所述主激光雷达的标定参数数据信息包括主激光雷达的坐标数据信息、主激光雷达的横滚角数据信息、主激光雷达的pitch角数据信息和主激光雷达的yaw角数据信息。
14、进一步的,在步骤u2中,所述从激光雷达的标定参数数据信息包括从激光雷达的坐标数据信息、从激光雷达的横滚角数据信息、从激光雷达的pitch角数据信息和从激光雷达的yaw角数据信息。
15、进一步的,在步骤u3中,所述采用混合标定算法对激光雷达的参数进行调整包括:
16、u31.基于所述主激光雷达的标定参数数据信息和所述从激光雷达的标定参数数据信息,构建主激光雷达的参数数组zj和从激光雷达的参数数组cj,
17、zj=(xj,yj,zj,rollj,pitchj,yawj),
18、cj=(mj,nj,qj,rj,pj,dj),
19、其中,(xj,yj,zj)为主激光雷达的坐标数据信息,rollj为主激光雷达的横滚角数据信息,pitchj为主激光雷达的pitch角数据信息,yawj为主激光雷达的yaw角数据信息,(mj,nj,qj)为从激光雷达的坐标数据信息,rj为从激光雷达的横滚角数据信息,pj为从激光雷达的pitch角数据信息,dj为从激光雷达的yaw角数据信息;
20、u32.基于所述主激光雷达的参数数组zj和从激光雷达的参数数组cj,构建激光雷达的混合标定函数q,
21、,
22、其中,(xj,yj,zj)为主激光雷达的坐标数据信息,rollj为主激光雷达的横滚角数据信息,pitchj为主激光雷达的pitch角数据信息,yawj为主激光雷达的yaw角数据信息;
23、u33.基于所述激光雷达的混合标定函数q,对主激光雷达的参数数组和从激光雷达的参数数组进行调整,得到调整后的主激光雷达和从激光雷达的标定参数数据信息。
24、为了实现上述目的及其他相关目的,本发明还提供了一种用于实现任一项所述的自动驾驶激光雷达混合标定的方法的系统,所述系统包括:
25、数据获取模块,用于获取目标障碍物的第一点云数据信息和目标障碍物的第二点云数据信息;
26、坐标转换模块,与所述数据获取模块连接,用于将目标障碍物的第一点云数据信息和第二点云数据信息进行坐标转换;
27、标定参数模块,与所述坐标转换模块连接,用于对主激光雷达和从激光雷达的标定,得到主激光雷达的标定参数数据信息和从激光雷达的标定参数数据信息;
28、标定参数调整模块,与所述标定参数模块连接,用于采用混合标定算法对激光雷达的参数进行调整。
29、进一步的,所述系统还包括数据显示模块,用于实时显示主激光雷达的点云数据信息和从激光雷达的点云数据信息。
30、进一步的,所述数据模块包括主激光雷达和从激光雷达,所述主激光雷达设于车辆的前方,所述从激光雷达设于车辆的侧面。
31、为了实现上述目的及其他相关目的,本发明还提供了一种计算机可读存储介质,该计算机可读存储介质上存储有被编程或配置以执行任意一项所述的自动驾驶激光雷达混合标定的方法的计算机程序。
32、本发明具有以下积极效果:
33、1.本发明通过采用坐标转换算法,得到转换后的目标障碍物的第一点云数据信息和第二点云数据信息,并后续对主激光雷达和从激光雷达分别进行标定,不仅提高了主激光雷达和从激光雷达的标定准确性,而且提高了主激光雷达和从激光雷达的标定的效率。
34、2.本发明采用混合标定算法对激光雷达的参数进行调整,输出调整后的主激光雷达和从激光雷达的标定参数数据信息,主从激光雷达相互互补进行外部参数的标定,不仅提高了参数标定的准确性,而且全程无需人工参与,降低了人工劳动成本。
技术特征:
1.一种自动驾驶激光雷达混合标定方法,其特征在于,所述方法包括:
2.根据权利要求1所述的自动驾驶激光雷达混合标定方法,其特征在于,在步骤u1中,所述采用坐标转换算法,得到转换后的目标障碍物的第一点云数据信息和第二点云数据信息包括:
3.根据权利要求2所述的自动驾驶激光雷达混合标定方法,其特征在于:所述激光雷达坐标系和车体坐标系的旋转角θ的取值范围为(0,90°)或(90°,180°)。
4.根据权利要求1所述的自动驾驶激光雷达混合标定方法,其特征在于,在步骤u2中,所述主激光雷达的标定参数数据信息包括主激光雷达的坐标数据信息、主激光雷达的横滚角数据信息、主激光雷达的pitch角数据信息和主激光雷达的yaw角数据信息。
5.根据权利要求1所述的自动驾驶激光雷达混合标定方法,其特征在于,在步骤u2中,所述从激光雷达的标定参数数据信息包括从激光雷达的坐标数据信息、从激光雷达的横滚角数据信息、从激光雷达的pitch角数据信息和从激光雷达的yaw角数据信息。
6.根据权利要求1所述的自动驾驶激光雷达混合标定方法,其特征在于,在步骤u3中,所述采用混合标定算法对激光雷达的参数进行调整包括:
7.一种用于实现权利要求1-6任一项所述的自动驾驶激光雷达混合标定的方法的系统,其特征在于,所述系统包括:
8.根据权利要求7所述的系统,其特征在于:所述系统还包括数据显示模块,用于实时显示主激光雷达的点云数据信息和从激光雷达的点云数据信息。
9.根据权利要求7所述的系统,其特征在于:所述数据模块包括主激光雷达和从激光雷达,所述主激光雷达设于车辆的前方,所述从激光雷达设于车辆的侧面。
10.一种计算机可读存储介质,其特征在于,该计算机可读存储介质上存储有被编程或配置以执行权利要求1~6中任意一项所述的自动驾驶激光雷达混合标定的方法的计算机程序。
技术总结
本发明涉及一种自动驾驶激光雷达混合标定的方法、系统及介质,所述方法包括:U1.车辆行驶至目标区域,基于车载主激光雷达获取目标障碍物的第一点云数据信息,基于车载从激光雷达获取目标障碍物的第二点云数据信息,在车体坐标系下,采用坐标转换算法,得到转换后的目标障碍物的第一点云数据信息和第二点云数据信息;U2.基于所述转换后的目标障碍物的第一点云数据信息,对主激光雷达进行标定,得到主激光雷达的标定参数数据信息。本发明不仅能够提高激光雷达外参标定的效率,而且通过主激光雷达和从激光雷达的混合标定,提高了参数标定的准确性。
技术研发人员:罗庚,芮建秋,沈彧,夏建文,孙朋,袁威,华琳娜
受保护的技术使用者:东风悦享科技有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!