一种应用在动态列车车轮不圆度测量中的数据采集方法与流程
本发明属于列车测量,具体涉及一种应用在动态列车车轮不圆度测量中的数据采集方法。
背景技术:
1、各种类型的列车在正常使用过程中,其车轮因磨损等原因会导致其发生不规则形变,从而使车轮出现多边形形态,一般都大于等于30阶以上。车轮不圆度检测设备在对车轮进行检测过程中采样点数量和采样点之间的距离是两个十分关键的参数,只有控制好这两个参数,才能更真实反应出车轮不圆度情况。而这两个参数又会受到检测设备采样频率/采样速度的影响,使得检测设备采样频率的准确性和实时性成为衡量和确保不圆度设备好坏的关键参数。
2、在目前主流的不圆度检测设备中,在测量设备来车方向不远处安装两个或者两个以上的磁钢传感器,再利用这些传感器来测量出车轮的速度,然后根据该速度进一步计算出采用频率,从而实现对采用点数量和采集点距离的控制,但是这种方法存在两个明显不足:
3、1、使用磁钢传感器测量列车速度的实时性不够理想,因为只有在某个磁钢传感器被触发的一瞬间才能得到一个列车的速度值,该速度值将一直被系统使用直到下一个速度被测量到。当列车出现速度变化的情况下,变化后的速度也只能在磁钢传感器再次被触发时才能被系统获取再对系统采样频率进行调整,在这两个速度之间的采样点数和采样距离可能就会存在比较大的偏差;像这样实时性完全得不到保障情况下,也就会导致系统的采样频率更新滞后,从而使系统采用点数量和采用距离与理论计算值不符,不能很理想的满足项目要求;
4、2、磁钢传感器的测速适用范围存在局限,对于车辆速度比较稳定的线路,其测量精度比较高,但是对于在该线路上行驶各种速度等级的列车,同时同一趟列车还存在速度变化比较大的情况,磁钢传感器所测量得到的速度偏差就会比较大,也会导致测量的速度不能满足项目要求。
技术实现思路
1、为解决现有技术中存在的技术问题,本发明的目的在于提供一种应用在动态列车车轮不圆度测量中的数据采集方法。
2、为实现上述目的,达到上述技术效果,本发明采用的技术方案为:
3、一种应用在动态列车车轮不圆度测量中的数据采集方法,包括以下步骤:
4、当列车车轮进入测量区域后,通过相机连续拍摄被测车轮包含车轮轴端盖信息牌的图像,通过对图像进行处理计算车轮在单位时间内的位移量,通过将实际采样点数与理论计算的采样点数进行对比来调整相机的采样频率。
5、进一步的,所述相机在使用前采用张正友标定法进行相机标定,获取相机的内外参数。
6、进一步的,所述相机标定的步骤包括:
7、按照项目要求固定好相机,相机采集平面保持和列车行驶方向平面平行,在相机的视野范围内,将标定板放置在列车车轮轴端盖信息牌平面上,将标定板在列车车轮轴端盖平面上竖直放置的位置记为初始位置,然后在列车车轮轴端盖信息牌平面上旋转和平移标定板,直到标定板覆盖整个列车车轮轴端盖信息牌区域,在标定板的移动过程中,标定板每移动或者转动一定距离,相机拍摄一次图像,整个标定过程中采集500-800张图像,图像采集完毕后,基于张正友标定法进行标定,标定完成后,获取相机的内外参数。
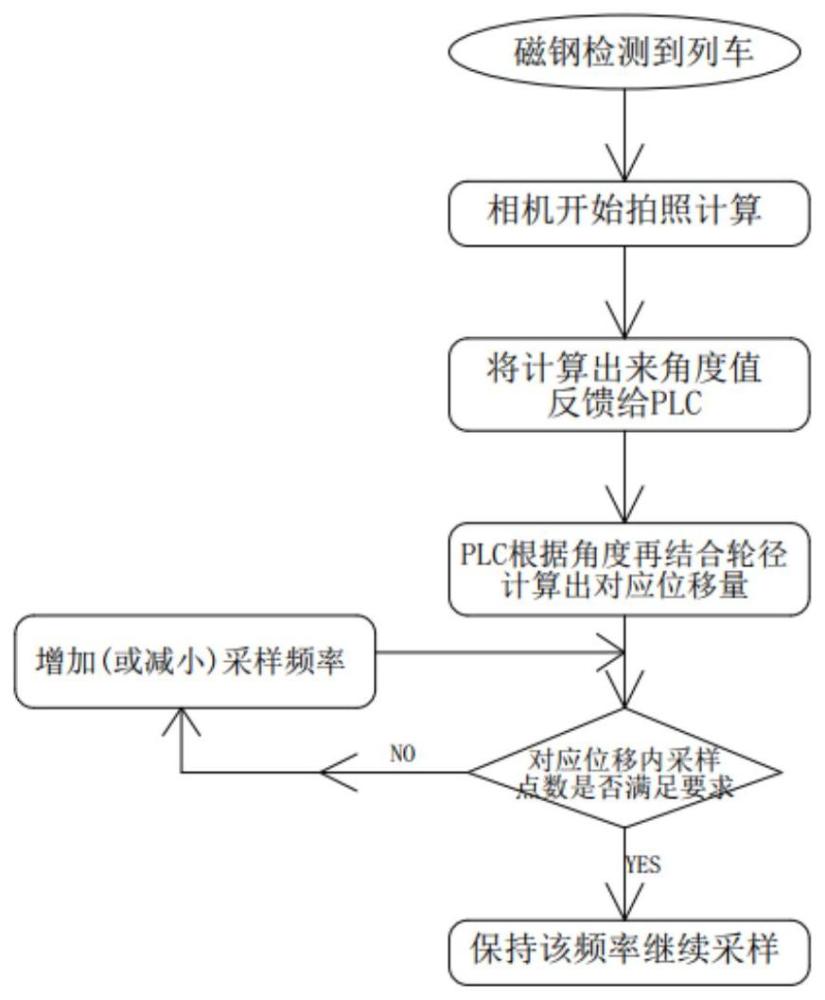
8、进一步的,所述相机和磁钢分别与plc相连,通过磁钢检测列车是否进入测量区域并传送信号至plc进行处理,当磁钢检测到列车进入测量区域时,plc以固定时间间隔触发相机拍照,通过plc对图像进行处理计算车轮在单位时间内的位移量并将实际采样点数与理论计算的采样点数进行对比来调整相机的采样频率。
9、进一步的,通过plc对图像进行处理的步骤包括:
10、对相机采集到的列车车轮轴端盖信息牌图像进行预处理,将彩色图像转化为灰度图像,并对图像上的噪声点进行滤波去噪,从而得到符合预设规范的图像;同时将列车车轮轴端盖信息牌上字符为水平摆正的图像作为标准图像,其信息牌上字符为正水平状态记为0度,使用矩形框将轴端盖上字符进行裁剪制作为模板图像。
11、进一步的,计算车轮在单位时间内的位移量的步骤包括:
12、通过相机采集列车车轮轴端盖前后两帧图像并传送至plc,plc对相机采集的列车车轮轴端盖信息牌图像与模板图像进行模板匹配,当字符模板匹配的正确率为95%以上表示匹配成功,否则表示模板匹配失败,需要进行再次模板匹配直到匹配成功;
13、匹配成功后,通过plc计算输入图像与模板图像的仿射变换关系,从而得到前后两帧图像上列车车轮轴端盖信息牌旋转的像素角度值,通过相机小孔成像原理获取列车车轮轴端盖实际旋转角度值,再根据车轮半径值,利用弧长与圆心角的关系得到单位时间内移动位移量。
14、进一步的,所述仿射变换关系表示为:
15、x`=ax+by+c
16、y`=dx+ey+f
17、式中,(x,y)为原始图像中的坐标,(x`,y`)为变换后图像中的坐标,a、b、c、d、e、f为变换参数。
18、进一步的,所述实际旋转角度值的获取步骤包括:
19、首先将列车车轮轴端盖划分为n份,并用红色线条描画,同时记录下红色线条之间的实际夹角值,然后通过相机采集列车车轮轴端盖图像,对采集的图像进行阈值分割,将红色线条提取出来,再对提取的红色线条进行直线拟合,求解n条红色线条之间的像素夹角值并记录;将n份实际夹角值和对应的像素角度值采用最小二乘法进行拟合,求解出像素角度值对应的实际角度值的计算公式,根据该计算公式即可将前后两帧图像上列车车轮轴端盖信息牌旋转的像素角度值转化为实际旋转角度值。
20、进一步的,所述最小二乘法表示为:
21、首先,拟合一个m次多项式曲线:
22、y=a0+a1x+a2x2+...+amxm
23、式中,a0,a1,...,am为多项式的系数,需要通过最小二乘法来确定;
24、构建最小二乘法的目标函数,使误差平方和最小化:
25、e=σ(yi-(a0+a1xi+a2xi2+...+amxim))2
26、式中,e为误差平方和,∑表示为对所有数据点求和,yi表示第i个数据点的y值,xi表示第i个数据点的x值。
27、进一步的,通过将实际采样点数与理论计算的采样点数进行对比来调整相机的采样频率的步骤包括:
28、所述相机拍第一张照片d的时间戳为t1,拍第二张照片的时间戳为t2,则单位时间值t=t2-t1,设单位时间值t内的采样频率为p,那么单位时间值t内的实际采样点数γ=t×p;
29、plc将得到的实际采样点数γ与理论计算的采样点数进行对比,当实际采样点数大于理论计算的采样点数时,plc根据存在偏差降低实际采样频率,当实际采样点数小于理论计算的采样点数时,plc根据存在偏差增加采样频率,从而保证实际与理论数据保持一致。
30、与现有技术相比,本发明的有益效果为:
31、本发明公开了一种应用在动态列车车轮不圆度测量中的数据采集方法,包括以下步骤:当列车车轮进入测量区域后,通过相机连续拍摄被测车轮包含车轮轴端盖信息牌的图像,通过对图像进行处理计算车轮在单位时间内的位移量,通过将实际采样点数与理论计算的采样点数进行对比来调整相机的采样频率。本发明提供的应用在动态列车车轮不圆度测量中的数据采集方法,利用相机测速的通用性,能有效克服磁钢对不同等级车速测量带来的误差,特别在该线路上经过不同等级速度的列车的情况,相机测速再通过plc处理,获取列车速度准确性的优势更加显著,能克服磁钢测速实时性不足的问题,利用plc快速触发相机,每触发一下相机就能到一次速度更新,即使列车存在速度的变化,也能及时通过相机每一次触发得到调整和更新,能确保系统的准确性。
- 还没有人留言评论。精彩留言会获得点赞!