从超声系统向数据处理设备传输数据的方法与流程
本发明涉及一种用于经由车辆数据总线(单向或双向的单线、双线或更多线数据总线,必要时是差分的)从具有至少一个超声发射器和超声接收器的超声系统向数据处理设备传输数据的方法。特别地,本发明涉及一种用于对车辆中的超声系统的回波信号进行分类以进行数据压缩并将经压缩的数据从所述超声系统传输至数据处理设备的方法。
背景技术:
1、超声系统已经在车辆中用于环境识别一段时间了。在这种情况下,由至少一个超声发射器发射超声突发信号(burstsignale),所述突发信号在被障碍物(通常是对象)反射之后由所述超声系统的至少一个超声接收器接收。作为超声发射器/超声接收器主要采用所谓的超声换能器,该超声换能器在轮询间隔的第一阶段中作为发射器工作而在轮询间隔的随后的第二阶段中作为超声接收器工作。
2、近年来,通过超声系统识别车辆环境中的障碍物或对象的要求稳定增长。尽管早期仅知道障碍物距车辆一定距离可能就足够了,但如今人们致力于基于回波信号变化曲线重建位于车辆环境中的障碍物类型。
3、但是,由此增加了要在车辆的超声系统和数据处理设备之间传输的数据量。然而,在车辆中常规使用的数据总线尤其是出于成本原因而仅具有有限的最大数据传输率。
4、因此,过去已经转向减少要传输的数据量。有时这通过例如在de 10 2008 042640 a1中描述的障碍物对象识别(具有针对障碍物识别的可靠性的相应置信度信息)来完成。在de 10 2005 024 716 a1和de 10 2012 207 164 a1中可以找到使用具有减少数据传输的可能性的超声系统的其他示例。
5、期望越来越多地将超声传感器的实际测量信号的数据传输到中央计算机系统,在该中央计算机系统中所述数据与来自其他超声传感器系统和/或也来自其他类型的传感器系统(例如雷达系统)的数据一起、也就是通过传感器融合被进一步处理为所谓的环境地图。因此,期望不是在超声传感器系统本身中、而是首先通过计算机系统中的这种传感器融合来执行对象识别,以避免数据丢失,从而减少针对错误信息以及由此导致的错误决策的概率并且减少事故风险。但是,与此同时,可用传感器数据总线的传输带宽是有限的。应当避免传感器数据总线的更换,因为它们已在现场证明了自己的价值。因此,与此同时期望不增加要传输的数据量。简而言之:必须增加数据的信息内容及数据与稍后在计算机系统中运行的障碍物识别(即对象识别)的相关性,而不必过多地提高数据速率,更好的是根本不必提高数据速率。正好相反,优选地甚至应当降低数据速率要求,以允许用于将超声传感器系统的状态数据和自测试信息传送到所述计算机系统的数据速率容量,这在功能安全性(fusi)的范畴中是强制要求的。通过本文提出的发明解决了这个问题。
6、在现有技术中已经知道处理超声传感器信号的各种方法。
7、例如,wo-a-2012/016 834公开了一种用于评估用于车辆环境检测的回波信号的方法。在该文献中提出,发射具有可预给定的编码和形状的测量信号并且在接收信号中借助于与所述测量信号的相关性搜索所述测量信号在所述接收信号中的分量并且确定这些分量。然后用阈值来评估相关性水平(而不是回波信号的包络的水平)。
8、de-a-4 433 957公开了周期性地辐射出超声脉冲以用于障碍物识别并且从传播时间推断出障碍物的位置,其中在评估时放大时间上在多个测量周期中相关的剩余回波,而不相关的剩余回波被抑制。
9、de-a-10 2012 015 967公开了一种用于解码由机动车辆的超声传感器接收的接收信号的方法,其中,以编码方式发射所述超声传感器的发送信号,并且为了解码将所述接收信号与参考信号相关,其中在将所述接收信号与所述参考信号相关之前,确定所述接收信号相对于所述发送信号的频移,并将所述接收信号与作为参考信号的、在其频率方面移动了所确定的频移的发送信号进行相关,其中为了确定所述接收信号的频移将所述接收信号经过傅立叶变换并且基于所述傅立叶变换的结果来确定所述频移。
10、de-a-10 2011 085 286公开了一种借助于超声来检测车辆周围环境的方法,其中,发射超声脉冲并且探测被对象反射的超声回波,并且将检测范围细分为至少两个距离范围,并且其中在相应的距离范围内用于所述检测的超声脉冲被彼此独立地发射并通过不同的频率加以编码。
11、wo-a-2014/108300公开了一种借助于信号转换器和评估单元来检测环境的设备和方法,其中取决于传播时间地对从环境接收的、在测量周期期间的第一时刻具有第一脉冲响应长度以及在同一测量周期内的稍后的第二时刻具有较大的第二脉冲响应长度的信号进行滤波。
12、然而,上述专利的技术教导全部从以下思想导出,即,已经在超声传感器本身中执行借助于超声传感器检测到的障碍物(对象)的识别,然后在识别出所述对象之后才传输对象数据。但是在此情况下,当使用多个超声发射器时的协同效应会丢失。
13、de-a-197 07 651、de-a-10 2010 044 993、de-a-10 2012 200 017、de-a-102013 015 402和ep-a-2 455 779公开了用于(部分地是预)处理来自超声传感器的信号并随后传输这些信号的各种方法。
技术实现思路
1、本发明的任务是进一步提高车辆的超声系统中的数据压缩程度,而不会由此损害障碍物和障碍物类型的识别的可靠性。另一个任务是进一步减少用于将测量数据从超声传感器系统传输到计算机系统的总线带宽的需求,或者提高数据传输的效率。
2、为了解决这些任务,利用本发明提出一种用于将数据经由车辆数据总线从具有至少一个超声发射器和超声接收器的超声系统传输到数据处理设备的方法,在该方法中-从接收自所述超声系统的至少一个超声接收器的回波信号中提取出预给定的信号变化曲线特征(signalverlaufscharakteristika),
3、-基于一组所提取的信号变化曲线特征识别出所述回波信号中的信号变化曲线对象,
4、-将每个已识别的信号变化曲线对象分配到多个预给定信号变化曲线对象类别之一,所述多个预给定信号变化曲线对象类别中的每一个由标识符指定,
5、-针对每个已识别的信号变化曲线对象确定描述该信号变化曲线对象的至少一个对象参数,其中,所述至少一个对象参数是所述信号变化曲线对象的相对于参考时刻的出现时刻,是所述信号变化曲线对象的时间范围,是距回波信号中在前或随后的信号变化曲线对象的时间距离和/或所述信号变化曲线对象的大小、高度和特别是最大高度,是所述信号变化曲线对象在其时间范围内的高度的时刻和特别是最大高度的时刻,和/或是属于所述信号变化曲线对象的回波信号段的面积大小以及特别是属于所述信号变化曲线对象的回波信号段的面积的位于阈值之上部分或位于阈值信号变化曲线之上部分的大小,并且其中,可以由针对信号变化曲线对象类别的标识符和为信号变化曲线对象确定的一个或多个对象参数来重建属于所述信号变化曲线对象的回波信号段,以及
6、-由所述超声系统针对已识别的信号变化曲线对象经由所述车辆数据总线来传输所述标识符和所述一个或多个对象参数,作为代表所述信号变化曲线对象的回波信号段的回波信号段数据,以用于识别障碍物和/或障碍物到所述超声系统的至少一个超声接收器或超声接收器之一的距离。
7、在此情况下,本发明的基本思想包括识别所述测量信号中的潜在相关结构以及通过仅传输关于所述已识别的潜在相关结构的少量数据、而不是所述测量信号本身来压缩所述测量信号。必要时,在所述计算机系统中将所述测量信号重建为重建的测量信号之后,进行对象的实际识别,所述对象例如是停车过程的障碍物,在所述计算机系统中典型地将多个超声传感器系统的多个压缩的测量信号组合(并在必要时解压缩)。因此,本发明具体地涉及通过识别所述测量信号中的结构来压缩数据。
8、因此,根据本发明的建议,检查回波信号是否存在确定的、预给定的信号变化曲线特征,以便随后传输代表这些信号变化曲线特征的数据,其中,随后可以在所述车辆的数据处理设备中从这些回波信号数据中得出进一步的结论。例如,可以重新产生回波信号或在重复识别出相同的、必要时时间错开地出现的信号变化曲线特征的情况下推断出障碍物、障碍物的类型、所述车辆到障碍物的距离的变化等。在此情况下重要的是,将识别障碍物的任务从所述超声系统移向所述数据处理设备,这降低了对所述超声系统的组件的“智能”要求,从而可以伴随而来地减少要从所述超声系统传输到所述数据处理设备的数据量,因为在所述数据处理设备中对所述回波信号数据进行如下实际分析,即哪个障碍物在所述车辆的环境中以及该障碍物在所述车辆环境内如何变化(特别是关于所述障碍物到所述车辆的距离)。
9、根据本发明规定,检查所接收的回波信号是否存在确定的预定义的信号变化曲线特征。这些信号变化曲线特征中的一个或多个定义了特殊的信号变化曲线,其在下文中被称为信号变化曲线对象。存在多个对象类别,其中现在将已识别的信号变化曲线对象分配给这些对象类别之一。每个对象类别都配备有标识符。此外,根据本发明确定至少一个对象参数,所述对象参数进一步描述或表征已识别的信号变化曲线对象。可能的对象参数例如包括:
10、-所述信号变化曲线对象的相对于参考时刻的出现时刻,
11、-所述信号变化曲线对象的时间范围,
12、-距所述回波信号中在前或随后的信号变化曲线对象的时间距离,和/或-所述信号变化曲线对象的大小、高度和特别是最大高度,
13、-所述信号变化曲线对象在其时间范围内的高度的时刻和特别是最大高度的时刻,和/
14、或
15、-属于所述信号变化曲线对象的回波信号段的面积(积分)大小,和-特别是属于所述信号变化曲线对象的回波信号段的面积(积分)的位于阈值之上部分或位于阈值信号变化曲线之上部分的大小。
16、可以在所述数据处理设备中由针对所述信号变化曲线对象类别的标识符和为信号变化曲线对象确定的一个或多个对象参数来重建属于所述信号变化曲线对象的回波信号段。以此方式,可以现在以压缩方式(即使用明显更少的数据)将基于已识别的信号变化曲线对象的回波信号段传输到所述数据处理设备,所述回波信号段本身必须通过其(数字)采样值传输到所述数据处理设备。根据本发明,传输所谓的回波信号段数据,其至少是所述信号变化曲线对象类别的标识符和描述所述信号变化曲线对象的至少一个对象参数。在需要的情况下,还可以一起传输其他数据,稍后将对此进行讨论。
17、在本发明的一种适当的实施方式中规定,所述超声系统具有多个超声发射器和多个超声接收器,并且经由所述车辆数据总线将代表从在可预给定的时间窗中接收的多个回波信号中分别识别出的信号变化曲线对象的回波信号段数据传输到所述数据处理设备,以用于识别障碍物和/或障碍物到所述超声系统的至少一个超声波接收器或超声接收器之一的距离。
18、如上所述,除了所述信号变化曲线对象类别的标识符和所述一个或多个对象参数之外,还可以将其他数据作为回波信号段数据进行传输。有利的是,在此情况下可以规定,除了所述回波信号区段数据之外,还经由所述车辆数据总线从所述超声测量设备向所述数据处理设备传输分配给相应已识别的信号变化曲线对象的置信度值。
19、根据本发明的搜索所述回波信号中的信号变化曲线特征适宜地是所述回波信号的位于阈值或阈值信号上方的局部极值和出现时刻、所述回波信号的位于阈值或阈值信号上方的绝对极值连同出现时刻、所述回波信号的位于阈值或阈值信号上方的绝对极值连同出现时刻、所述回波信号的位于阈值或阈值信号上方的鞍点连同出现时刻、在所述回波信号的信号电平变得更大时出现的超越一阈值或所述阈值或超越一阈值信号或所述阈值信号连同超越时刻、和/或在所述回波信号的信号电平变得更小时出现的低于一阈值或所述阈值或低于一阈值信号或所述阈值信号连同低于时刻、或者按时间顺序连续出现的上述信号变化曲线特征的一个或多个的可预给定组合。
20、优选地,可以进一步规定,所述信号变化曲线特征或所述对象参数还包括:是否、何时以及如何调制接收到的回波信号,更确切地说,例如以单调增加或严格单调增加的频率(正线性调频)、例如以单调下降或严格单调下降的频率(负线性调频)、或例如以保持不变的频率(无线性调频)调制。在这种关联下,参考de-b-10 2017 123 049、de-b-10 2017123 051、de-b-10 2017 123 052和de-b-10 2017 123 050,它们的内容通过引用合并到本发明的主题中。
21、同样可以应用其他频率调制方法或一般而言的其他调制方法。在本文中,例如通过各种类型的编码来提供超声信号的调制。有利地采用抗多普勒效应的编码。一般而言,可以说所述编码包括,可以将编码理解为预给定的小波,其时间平均值特别是可以不等于零。
22、在本发明的另一有利的实施方式中规定,所述超声系统的多个超声发射器发射不同调制的超声信号,由所述超声接收器发送的回波信号段数据还包括分别接收的回波信号的调制标识符,以及基于所述调制标识符在所述数据处理设备中确定:已经从哪个超声发射器发射了已经由以下超声接收器接收作为回波信号或回波信号分量的超声发射信号,所述超声接收器向所述数据处理设备传输关于所述回波信号或回波信号分量的回波信号段数据。
23、根据本发明的方法的优点特别是在于,所述超声系统具有多个超声发射器和多个超声接收器,其中经由所述车辆数据总线将以下回波信号数据传输到所述数据处理设备,所述回波信号数据代表从在可预给定时间窗中接收的多个回波信号中分别提取的信号变化曲线特征。所述数据处理设备现在在可预给定的测量时间窗中接收由多个超声接收器接收的回波信号或在这些回波信号中探测到的信号变化曲线特征的描述这些回波信号的回波信号数据。例如,如果相邻布置的超声接收器接收到类似的回波信号,则可以将其用于对障碍物分类。已经发现,与为了推断障碍物的类型而首先单独观察地检查来自每个超声接收器的每个回波信号以便然后必要时将从中获得的关于障碍物类型的认识相互比较相比,基于来自多个超声接收器的多个压缩的回波信号来确定障碍物类型的识别明显更有效率。
24、因此,在根据本发明的方法中可以说是产生回波信号的特征向量,所述特征向量包含信号变化曲线特征以及在所述回波信号的变化曲线中的所属时刻。因此,所述特征向量描述所述回波信号的各个片段以及所述回波信号中的事件,其中还没有进行障碍物识别等。
25、根据本发明还可以规定,从所述回波信号中形成包络信号,该包络信号是所述特征向量的一部分,或者该包络信号的一部分可以是所述特征向量的组成部分。还可能的是,将接收到的回波信号与所属的超声发射信号卷积,即,与在反射后作为回波信号接收到的超声信号卷积,并从而形成相关信号,其特征可以是所述特征向量的一部分。
26、描述所述信号变化曲线特征的回波信号数据可以有利地包括参数数据。在这种情况下,参数数据优选地可以是时间戳,所述时间戳说明何时在回波信号变化曲线中出现所述特征或一个特征。所述时间戳的时间参考(即参考时刻)是任意的,但是对于由超声系统和数据处理设备组成的系统来说是预定义的。另一个参数可以是所述回波信号的描述信号变化曲线特征的片段的振幅和/或延伸等。在此应当注意,在下文中术语“振幅”应被一般性地理解,并且例如用于信号的(当前)信号电平和/或该信号的峰值。
27、一方面,根据本发明实现的对要经由所述超声系统和所述数据处理设备之间的数据总线传输的数据的压缩降低了数据总线负载,从而降低了对emv要求的严格性,另一方面,在所述回波信号的接收时间期间提供了空闲的数据总线容量,其中这些空闲的数据总线容量于是可以用于将控制命令从所述数据处理设备传输到所述超声系统以及用于将所述超声系统的状态信息和其他数据传输到所述数据处理设备。在此情况下,有利地采用对要传输的数据分优先级保证了首先传输与安全性相关的数据,从而避免针对回波信号数据的不必要的停滞时间。
28、根据本发明的有利的实施方式可以规定,所述超声系统包括多个超声发射器和多个超声接收器,并且经由所述车辆数据总线将代表从在可预给定的时间窗中接收的多个回波信号中分别提取出的信号变化曲线特征的回波信号数据传输到所述数据处理设备。
29、根据本发明的有利的实施方式可以规定,除了所述回波信号数据之外,分配给相应提取的信号变化曲线特征的置信度值也经由所述车辆数据总线从所述超声测量设备传输到所述数据处理设备。
30、根据本发明的另一有利的实施方式可以规定,信号变化曲线特征是所述回波信号的局部极值连同时刻、所述回波信号的绝对极值连同时刻、所述回波信号的鞍点连同时刻、在回波信号的信号电平变大时出现的阈值超越连同超越时刻、和/或在所述回波信号的信号电平变小时出现的低于阈值和低于时刻。然而,信号变化曲线特征同样也可以是前述信号变化曲线特征中多个的时间上的序列(具有可预给定的顺序)。
31、此外,根据本发明的有利的实施方式可以规定,所述信号变化曲线特征还包括:是否、何时以及如何调制接收的回波信号,更确切地说例如以单调增加的频率(正线性调频)、例如以单调下降的频率(负线性调频)、或例如以保持不变的频率(无线性调频)来调制。
32、根据本发明的另一有利的实施方式可以规定,所述超声系统的多个超声发射器发射调制的超声信号,并且可以基于对所述回波信号的调制确定从哪个超声发射器发射了作为回波信号或回波信号分量被超声接收器接收的超声发射信号。
33、因此,利用本发明提出了一种用于将传感器数据从传感器传输到计算机系统的方法。特别合适的是将该方法用于在车辆中将超声接收信号的数据从超声接收器(以下称为超声传感器)传输至控制设备(作为计算机系统或数据处理设备)。根据本发明的变型,首先产生超声突发脉冲并将其发射到自由空间中,典型地在车辆的环境中。在此情况下,超声突发脉冲由多个以超声频率彼此相继的声音脉冲组成。所述超声突发脉冲是由于机械振荡器起振并再次停振而形成的。这样发射的超声突发然后被对象(例如,障碍物)反射并由接收器作为超声信号接收,并转换为接收信号。特别优选地,所述超声发射器与超声接收器相同,于是在下文中被称为换能器,所述换能器交替地作为超声发射器和超声接收器工作。但是,以下解释的原理也可以应用于分离的接收器和发射器。
34、分配给超声传感器的是信号处理单元,该信号处理单元针对可预给定或预给定的信号变化曲线特征来分析所述接收信号,以便最小化要传输的、为描述所述回波信号变化曲线所需要的数据量。因此,所述超声传感器的信号处理单元可以说对所述接收信号进行数据压缩以产生压缩的数据,即特征性回波信号数据。然后将信息以压缩的方式传输到所述计算机系统。由此,通过该数据传输使emv负载最小化,并且可以以一定的时间间隔将用于系统故障识别的超声传感器的状态数据经由超声传感器和计算机系统之间的数据总线传输到所述计算机系统。
35、已经证明有利的是,对经由所述数据总线的数据传输分优先级。在此情况下,向所述计算机系统通知传感器(在本文中示例性地也就是超声传感器)的对安全至关重要的故障具有最高优先级,因为这些故障以很高的概率影响所述超声传感器的测量数据的有效性。这些数据从所述超声系统发送到所述计算机系统。请求所述计算机系统执行与安全相关的自测试具有第二高的优先级。这样的指令从所述计算机系统发送到所述超声系统。所述超声传感器本身的数据具有第三高的优先级,因为不允许增加等候时间。所有其他数据对于经由数据总线的传输具有较低的优先级。
36、特别有利的是,一种用于特别是在车辆中将传感器数据、特别是超声传感器的传感器数据从传感器传输到计算机系统的所述方法(包括发射具有发射所述超声突发脉冲的开始57和结束56的超声突发脉冲,并且包括接收超声信号并在至少从发射所述超声突发脉冲的结束56开始的接收时间te内形成接收信号,以及包括经由数据总线、特别是单线数据总线向所述计算机系统传输所述压缩的数据)被配置为,使得从所述传感器到所述计算机系统的数据传输54以从所述计算机系统经由所述数据总线到所述传感器的起始指令53、并且在发射所述超声突发脉冲的结束56之前开始,或者在从所述计算机系统经由所述数据总线到所述传感器的起始指令53之后并且在发射所述超声突发脉冲的开始57之前开始。然后,在起始指令53之后周期性地持续地进行传输54,直到数据传输58的结束为止。然后,数据传输58的该结束在时间上位于接收时间te的结束之后。
37、作为数据压缩的第一步骤,所提出的方法的另一变型规定从所述接收信号中形成特征向量信号。这样的特征向量信号可以包括多个模拟和数字数据信号。因此,所述特征向量信号表示或多或少复杂的数据/信号结构,在最简单的情况下,所述特征向量信号可以理解为由多个子信号组成的向量信号。
38、例如可能有意义的是,形成所述接收信号的一阶和/或更高阶时间导数或形成所述接收信号的单次或多次积分,然后它们是所述特征向量信号内的子信号。
39、还可以形成包络信号,然后所述包络信号是所述特征向量信号内的子信号。
40、此外,可能有意义的是,将所述接收信号与所发射的超声信号进行卷积并从而形成相关信号,然后该相关信号可以是所述特征向量信号内的子信号。在这种情况下,一方面,该信号可用作发射的超声信号,所述发射的超声信号曾用于操控发射器的驱动器,或者另一方面例如用作曾在所述发射器上加以测量并从而更好地对应于实际辐射的声波的信号。
41、最后可能有意义的是,通过匹配滤波器(英语:matched filter)来探测预确定信号变化曲线特征的出现并为所述预确定信号变化曲线特征中一些的相应信号变化曲线特征形成匹配滤波器信号。在此情况下,匹配滤波器应理解为一种优化信噪比(英语:signalto noise ratio,snr)的滤波器。在受到干扰的回波信号中应当识别出预定义的信号变化曲线特征。在本文献中也经常使用术语“相关滤波器”、“信号匹配滤波器(saf)”或仅仅“匹配滤波器”。所述匹配滤波器用于最佳地确定已知信号形状的振幅和/或位置的存在性(探测)、即预确定信号变化曲线特征的存在性,而且还是存在干扰(参数估计)的情况下,所述干扰例如是其他超声发射器的信号,和/或在存在地面回波的情况下。
42、然后,匹配滤波器信号优选是所述特征向量信号内的子信号。
43、可以在所述特征向量信号的其他子信号中通知确定的事件。在本发明的意义上,这些事件也是信号变化曲线特征。因此,信号变化曲线特征不仅包括诸如矩形脉冲或小波或者波列的特殊信号形状,而且还包括在所述接收信号的变化曲线中和/或在由所述接收信号导出的信号的变化曲线中的突出点,诸如例如可以通过从所述接收信号中滤波而获得的包络信号。
44、可以是所述特征向量信号的子信号的另一信号可以例如探测:所述接收信号的包络、即所述包络信号是否与预给定的第一阈值相交。
45、可以是所述特征向量信号的子信号的另一信号可以例如探测:所述接收信号的包络、即所述包络信号是否上升地与可以与预给定的第二阈值相交,所述第二阈值可以与所述第一阈值相同。
46、可以是所述特征向量信号的子信号的另一信号可以例如探测:所述接收信号的包络、即所述包络信号是否下降地与预给定的第三阈值相交,该第三阈值可以与所述第一阈值相同。
47、可以是所述特征向量信号的子信号的另一信号可以例如探测:所述接收信号的包络、即所述包络信号是否具有大于第四阈值的最大值,该第四阈值可以与上述阈值相同。
48、可以是所述特征向量信号的子信号的另一信号可以例如探测:所述接收信号的包络、即所述包络信号是否具有大于第五阈值的最小值,该第五阈值可以与前述阈值相同。在这种情况下,优选地评估所述包络的至少一个在前的最大值是否具有到所述最小值的最小距离,以避免探测到噪声。此时可以考虑其他滤波。还可以检验:在所述最小值与在前的最大值之间的时间间隔是否大于第一时间最小距离。这些条件的满足分别设定了标志或信号,该标志或信号本身又优选是所述特征向量信号的子信号。
49、同样,应当以类似的方式检查:其他信号变化曲线特征的时间距离和以幅度度量的距离是否满足一定的真实性要求,如最小时间距离和/或幅度中的最小距离。从这些检验中也可以导出其他模拟的、二进制的或数字的子信号,这些子信号由此进一步增加了所述特征向量信号的维度。
50、必要时,可以在提高显著性阶段还将所述特征向量信号转换为显著特征向量信号。然而,实践证明,这至少对于目前的要求还不是必需的。
51、根据本发明的方法的一种变型,基于所述特征向量信号或所述显著特征向量信号,在所述接收信号内识别信号变化曲线特征以及将信号变化曲线特征分类为识别的信号变化曲线特征类别。
52、如果例如匹配滤波器的输出信号的幅度、以及因此所述特征向量信号的子信号的幅度高于必要时特定于匹配滤波器的第六阈值,则可以将所述匹配滤波器为其设计的信号变化曲线特征认为是已识别的。在这种情况下,优选还考虑其他参数。例如,如果在突发脉冲期间发送了频率不断增加的超声突发脉冲(称为正线性调频),则还预期具有这种调制特性的回波。如果所述包络的信号形状(例如所述包络的三角信号形状)在时间上局部地与预期的信号形状一致,但调制特性不一致,则它不是所述发射器的回波,而是可能来自其他超声发射器的干扰信号或来自超作用范围的干扰信号。在这方面,所述系统然后可以在固有回波和外来回波之间进行区分,由此将同一个信号形状分配给两个不同的信号变化曲线特征,即固有回波和外来回波。在此情况下,固有回波的传输优选优先于外来回波的传输,因为前者通常与安全性相关,而后者通常与安全性无关。
53、典型地,为每个已识别的信号变化曲线特征分配至少一个信号变化曲线特征参数或为该信号变化曲线特征确定至少一个信号变化曲线特征参数。优选地,这是说明特性何时在所述回波信号中出现所述特征的时间戳。在这种情况下,所述时间戳可以例如涉及所述接收信号中的所述信号变化曲线特征的时间起点或所述信号变化曲线特征的时间终点或所述信号变化曲线特征的时间重心的时间位置等。还可以考虑其他信号变化曲线特征参数如幅度、延伸等。因此在所提出的方法的一种变型中,传输具有至少一个已识别的信号变化曲线特征类别的至少一个分配的信号变化曲线特征参数,该信号变化曲线特征参数是时间值并且说明适合于从中能够推断出自发射先前的超声波突发脉冲以来的时间的时间位置。优选地,随后从中依据这样确定和传输的时间值来确定车辆环境周围的对象(例如障碍物)的已确定的距离。
54、最后,优先传输已识别的信号变化曲线特征类别,优选分别与分配的信号变化曲线特征参数一起传输。所述传输也可以以更复杂的数据结构进行。例如可以考虑,首先传输已识别的安全相关的信号变化曲线特征(例如已识别的障碍物)的时刻,然后传输安全相关的信号对象的已识别的信号变化曲线特征类别。由此进一步减少了等候时间。
55、根据本发明的方法的变型,在一个变型中至少包括将线性调频值确定为分配的信号变化曲线特征参数,所述分配的信号变化曲线特征参数说明已识别的信号变化曲线特征是具有正线性调频、负线性调频还是非线性调频特性的超声发射突发脉冲的回波。“正线性调频(chirp-up)”指的是在所述接收信号中所接收的信号变化曲线特征内的频率增加。“负线性调频(chirp-down)”是指在所述接收信号中所接收的信号变化曲线特征内的频率下降。“非线性调频(no-chirp)”是指在所述接收信号中所接收的信号变化曲线特征内的频率基本上保持不变。
56、根据本发明方法的一种变型,也可以通过例如形成一方面接收信号或从所述接收信号导出的信号与参考信号之间的相关来形成置信度信号(置信度值konfidenzwert),所述参考信号例如是所述超声发射信号或另一预期小波。然后,所述置信度信号典型地是所述特征向量信号的子信号。
57、在本方法的另一种变型中,在此基础上还形成相位信号,该相位信号说明例如所述接收信号或由所述接收信号形成的信号(例如置信度信号)相对于参考信号(例如所述超声发射信号和/或另一参考信号)的相移。
58、类似地,在所提出的方法的另一变型中可以通过在一方面所述相位信号或从所述相位信号导出的信号与参考信号之间形成相关来形成相位置信度信号,并且将该相位置信度信号用作所述特征向量信号的子信号。
59、然后在评估所述特征向量信号时,有意义的是将所述相位置信度信号与一个或多个阈值进行比较,以产生离散化的相位置信度信号,所述离散化的相位置信度信号本身又可以成为所述特征向量信号的一部分。
60、在所提出的方法的一种变型中,对所述特征向量信号和/或所述显著特征向量信号的评估可以如下地进行:即,使得为可识别的信号变化曲线特征类别形成所述特征向量信号与一个或多个信号变化曲线特征原型值之间的一个或多个距离值。这样的距离值可以是布尔值、二进制值、离散值、数字值或模拟值。优选地,所有距离值在一个非线性函数中相互逻辑连接。从而在预期三角形状的正线性调频回波的情况下,可以丢弃接收到的三角形状的负线性调频回波。这种丢弃是非线性过程。
61、反过来,所述接收信号中三角形可能不同地形成。这首先涉及所述接收信号中三角形的幅度。如果所述接收信号中的幅度足够大,则例如分配给该三角形信号的匹配滤波器提供高于预给定的第七阈值的信号。于是在这种情况下,例如可以将由该信号变化曲线特征类别(三角形信号)所识别的信号变化曲线特征分配给该超越时刻。在这种情况下,所述特征向量信号和所述原型(在此是第七阈值)之间的距离值低于一个或多个预确定的、二进制的、数字的或模拟的距离值(在此0=相交)。
62、在该方法的另一变型中,至少一个信号变化曲线特征类别是小波,这些小波由估计设备(例如匹配滤波器)和/或估计方法(例如,在数字信号处理器中运行的估计程序)估计并因此被探测到。术语“小波”表示以下函数:其可以用作连续或离散小波变换的基础。这个词是法语“ondelette”的重新创建,意思是“小波”,部分按字面意义(“onde”->“波”),部分语音(“-lette”->“小”)地译成中文。“小波”一词是二十世纪八十年代在地球物理学中(jean morlet,alex grossman)针对概括短时傅里叶变换的函数而创造的,但自二十世纪八十年代后期以来仅仅被用于目前常用的含义。在二十世纪九十年代,由于ingriddaubechies(1988)发现了紧凑、连续(至任何阶数的可微分性)和正交小波,并借助于多分辨率分析(multiresolution analysis-mra)由stéphane mallat和yves meyer(1989)发展了快速小波变换(fwt)的算法,引发了名副其实的小波繁荣。
63、与傅立叶变换的正弦和余弦函数相反,最常用的小波不仅在频谱中具有局部性,而且在时域中也具有局部性。在此在小的分散的意义下理解“局部性”。概率密度是所观察的函数或其傅里叶变换的归一化绝对值平方。在此情况下,类似于海森堡测不准原理,两个方差的乘积始终大于常数。由于这个局限性,函数分析中出现了离散小波变换的先驱paley-wiener理论(raymond paley,norbert wiener)和对应于连续的小波变换的calderón-zygmund理论(alberto calderón,antoni zygmund)。
64、尽管在专业用途中小波函数的积分始终为0,但小波函数通常采用向外输出(变小)波的形式(也就是,2个小波=ondelet=小波)。但是在本发明的意义下,具有不同于0的积分的小波也是允许的。本文示例性地举出下面描述的矩形和三角形小波。
65、具有0积分的小波的重要示例是haar小波(alfred haar 1909年)、以ingriddaubechies命名的daubechies小波(约1990年)、同样由ingrid daubechies构建的coiflet小波和理论上更重要的meyer小波(yves meyer,约1988年)。
66、对于任意维度的空间存在小波,大多使用一维小波基的张量积。由于mra中两标量方程的分形性质,大多数小波具有复杂的形状,其中大多数没有封闭形状。这是特别重要的,因为上面提到的特征向量信号是多维的,因此允许将多维小波用于信号对象识别。
67、因此,所提出的方法的一个特殊变型是将具有多于两个维度的多维小波用于信号对象识别。特别地,建议使用相应的匹配滤波器来识别这种具有多于两个维度的小波,以便必要时向所述特征向量信号补充适合用于所述识别的其他子信号。
68、一种特别合适的小波,特别是用于所述包络信号的小波例如是三角形小波。该三角形小波的特征在于三角形小波的开始时刻、时间上在所述三角形小波的开始时刻之后在时间上线性增加至所述三角形小波的幅度最大值的小波幅度、以及时间上在所述三角形小波的最大值之后在时间上线性下降到所述三角形小波的一端的小波幅度。
69、另一个特别合适的小波是矩形小波,在本发明的意义下它也包括梯形小波。矩形小波的特征在于所述矩形小波的开始时刻,随后是所述矩形小波的小波幅度随着所述矩形小波的第一时间斜率而增加,直到所述矩形小波的第一平稳时刻为止。在所述矩形小波的第一平稳时刻之后是小波幅度以小波幅度的第二斜率一直持续到所述矩形小波的第二平稳时刻。在所述矩形小波的第二平稳时刻之后是以第三时间斜率下降,直到所述矩形小波的时间端部。在此情况下,第二时间斜率的绝对值小于第一时间斜率的绝对值的10%并且小于第三时间斜率的绝对值的10%。
70、代替先前描述的小波,还可以使用其他二维小波例如正弦半波小波,其同样具有不等于零的积分。
71、建议在使用小波时,例如通过相关和/或适于探测所涉及小波的匹配滤波器的输出电平对已识别的信号变化曲线特征或所述小波的预定义阈值的超越的时刻,将所述信号变化曲线特征的所涉及小波的时间位移作为信号变化曲线特征参数。优选地,评估所述接收信号的包络和/或相位信号和/或置信度信号等。
72、可以被确定的另一个可能的信号变化曲线特征参数是已识别的信号变化曲线特征的所涉及小波的时间压缩或扩展。同样,可以确定已识别的信号变化曲线特征的小波的幅度。
73、在本文公开的方法的建议的发展中已认识到,有利的是,将非常快到达的回波的已识别的信号变化曲线特征的数据首先从所述传感器传输到所述计算机系统,然后才传输随后被识别的信号变化曲线特征的后续数据。优选地,在此情况下总是至少传输已识别的信号变化曲线特征类别和时间戳,所述时间戳优选地应当说明所述信号变化曲线特征何时再次到达所述传感器。在识别过程的范围内,可以向为所述接收信号的片段而考虑的不同信号变化曲线特征分配分数,这些分数说明根据所使用的估计算法将什么概率分配给所述信号变化曲线特征的存在。在最简单的情况下,这样的分数是二进制的。但是,优选地它是复数、实数或整数。如果多个信号变化曲线特征具有高的分数值,则在一些情况下有意义的是:也传输具有较低分数值的已识别的信号变化曲线特征的数据。为了使得所述计算机系统能够正确处理,对于这种情况不仅应当传输已识别的信号变化曲线特征的数据和针对相应信号变化曲线特征的时间戳,而且还应当传输所确定的分数值。因此,在这种情况下,将由已识别的信号变化曲线特征及其时间位置和附加的分配的分数值构成的假设列表传输到所述计算机系统。
74、优选地,根据fifo原理来传输已识别的信号变化曲线特征类别的数据和分配给它的数据(例如是相应已识别的信号变化曲线特征类别的时间戳和分数值),即分配的信号变化曲线特征参数。这确保了总是首先传输最接近对象的反射的数据,并且从而根据概率优先处理所述车辆与障碍物碰撞的安全关键情况。
75、除了传输测量数据外,还可以传输所述传感器的故障状态。如果所述传感器通过自测试设备确定存在缺陷并且先前传输的数据可能潜在地存在错误,那么这也可以在接收时间te期间发生。由此确保了所述计算机系统可以在尽可能早的时刻获得有关所述测量数据评估变化的知识,并且可以将所述变化丢弃或以不同的方式处理。这对于紧急制动系统特别重要,因为紧急制动是对安全关键的干预,只有在基础数据具有相应的置信度值时才允许导入该干预。因此,与此相对,推迟所述测量数据的传输、即例如已识别的信号变化曲线特征类别的数据的传输和/或分配的一个信号变化曲线特征参数的传输,并因此将优先级定得较低。当然,如果传感器中出现故障,则可以考虑中止传输。但是在一些情况下看起来可能发生了故障,但不确定。在这方面,在这种情况下指示传输的继续。因此,所述传感器的安全关键故障的传输优选地被确定为较高的优先级。
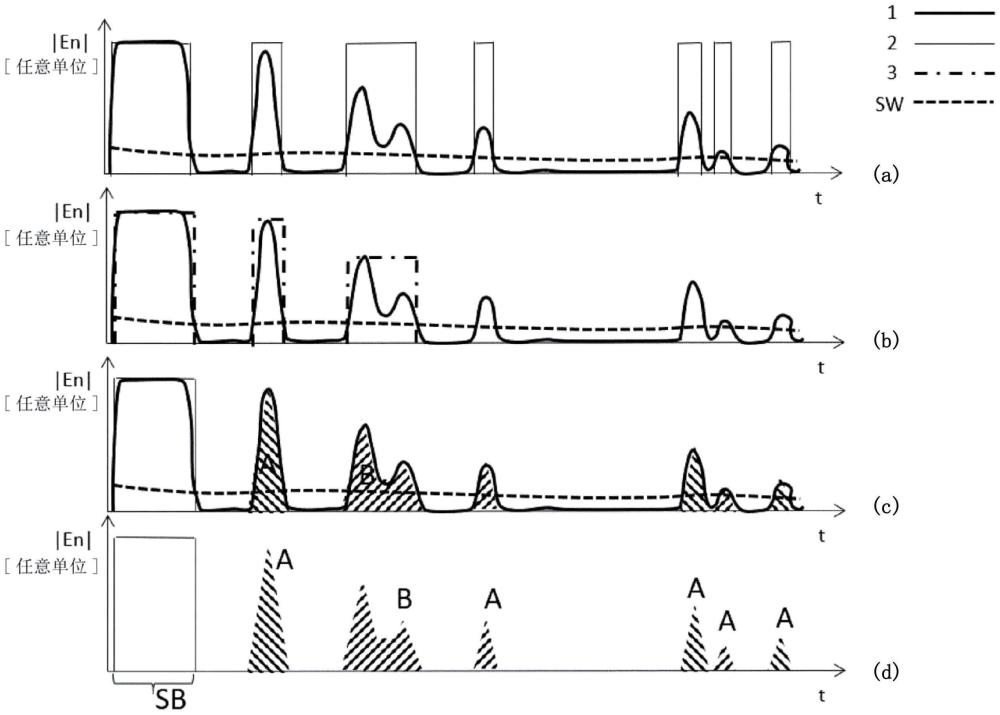
76、除了已经描述的具有0积分值的小波和附加地在本文被称为小波的具有不同于0的积分值的信号片段之外,在所述接收信号的变化曲线中的确定时刻在本发明的意义下也可以被理解为信号变化曲线特征,其可以用于数据压缩并且可以被传输以代替所述接收信号的采样值。可能的信号变化曲线特征集合的这些子集在下文中称为信号时刻。因此,所述信号时刻在本发明的意义下是所述信号变化曲线特征的一种特殊形式。
77、第一可能信号变化曲线点以及因此所述信号变化曲线特征是所述包络信号1的幅度与阈值信号sw的幅度在上升方向上的相交。
78、第二可能信号变化曲线点以及因此的信号变化曲线特征是所述包络信号1的幅度与阈值信号sw的幅度在下降方向上的相交。
79、第三可能信号变化曲线点以及因此的信号变化曲线特征是所述包络信号1的幅度在阈值信号sw的幅度之上的最大值。
80、第四可能信号变化曲线点以及因此的信号变化曲线特征是所述包络信号1的幅度在阈值信号sw的幅度之上的最小值。
81、必要时可能有意义的是,对于这四种示例性信号时刻类型和其他类型的信号时刻使用特定于信号时刻类型的阈值信号。
82、信号变化曲线特征的时间序列典型地不是任意的。例如,如果在具有足够幅度的包络信号1中预期有三角形小波,则除了在适合于探测这种三角形小波的匹配滤波器的输出处的相应最小电平之外,在时间上与超越在所述匹配滤波器的输出处的所述最小电平相关地,还可以预期:
83、1.具有包络信号1的幅度与阈值信号sw的幅度在上升方向上的交叉的第一可能信号变化曲线点的出现,以及在时间上接着的
84、2.具有在阈值信号sw的幅度之上的包络信号1的幅度最大值的第三可能信号变化曲线点的出现,以及在时间上接着的
85、3.具有包络信号1的幅度与阈值信号sw的幅度在下降方向上的交叉的第二可能信号变化曲线点的出现。
86、此外,在所述匹配滤波器的输出处超越所述最小电平是第五可能信号变化曲线点的另一示例,因此是另一可能的信号变化曲线特征。
87、已识别的信号变化曲线特征的由此得到的分组和时间序列可以自己例如通过veterbi解码器被识别为信号变化曲线特征的预定义的预期分组或时间序列,并因此可以自己再次表示信号变化曲线特征。因此,第六可能信号变化曲线点以及因此信号变化曲线特征是其他信号变化曲线特征的这种预定义分组和/或时间序列。
88、如果识别到信号变化曲线特征的这种分组或这种信号变化曲线特征类别的时间序列,则优选地执行该已识别的组合的信号变化曲线特征类别和至少一个分配的信号变化曲线特征参数的传输、而不是各个信号变化曲线特征的传输,因为由此节省大量的数据总线容量。可能存在两者都被传输的情况。在此情况下,传输信号变化曲线特征的信号变化曲线特征类别的数据,该数据是其他信号变化曲线特征的预定义时间序列和/或分组。为了实现压缩,有利的是不传输这些其他信号变化曲线特征中的至少一个的至少一个信号变化曲线特征类别。
89、信号变化曲线特征的时间分组特别是在这些信号变化曲线特征的时间间隔不超过预定义距离时存在。在上面提到的示例中,应当考虑所述匹配滤波器中的信号传播时间。典型地,允许所述匹配滤波器比比较器慢。因此,所述匹配滤波器的输出信号的变换应当与相关信号时刻的出现时间具有固定的时间关系。
90、特别优选地,所述车辆中的数据传输经由双向的单线数据总线进行。在此情况下优选地,返回线路由所述车辆的车身确保。优选以电流调制的方式将传感器数据发送到所述计算机系统。用于控制所述传感器的数据通过所述计算机系统优选以电压调制的方式发送到所述传感器。根据本发明已经认识到,使用psi5数据总线和/或dsi3数据总线特别适合于所述数据传输。此外已经认识到,特别有利的是,以>200千比特/秒的传输速率将数据传输到所述计算机系统以及以>10千比特/秒、优选地以20千比特/秒的传输速率将数据从所述计算机系统传输到所述至少一个传感器。此外已经认识到,应当利用发送电流将从所述传感器到所述计算机系统的数据传输调制到所述数据总线上,该发送电流的电流强度应当小于50ma、优选地小于5ma、优选地小于2.5ma。对于这些运行值,必须相应地适配这些总线。但是基本原理仍然存在。
91、为了执行上述方法,需要具有到所述数据总线、优选地到所述单线数据总线的数据接口的计算机系统,所述计算机系统支持对这种压缩数据的解压缩。然而,通常所述计算机系统不执行完全的解压缩,而是例如仅评估所述时间戳和已识别的信号变化曲线特征类型。执行上述方法之一所需的传感器具有至少一个发射器和至少一个接收器,用于产生接收信号,它们也可以组合为一个或多个换能器地存在。此外,所述传感器至少具有用于处理和压缩所述接收信号的设备以及用于经由所述数据总线、优选地经由所述单线数据总线将数据传输到所述计算机系统的数据接口。对于所述压缩,用于压缩的设备优选地具有以下子设备的至少之一:匹配滤波器,比较器,用于产生一个或多个阈值信号sw的阈值信号产生设备,比较器,用于形成导数的微分器,用于形成积分信号的积分器,其他滤波器,用于从所述接收信号中产生包络信号的包络形成器,用于将所述接收信号或从所述接收信号导出的信号与参考信号进行比较的相关滤波器。
- 还没有人留言评论。精彩留言会获得点赞!