基于LPS和通用机械执行机构的密度可控三维测量方法
本发明属于三维测量,具体涉及一种基于lps和通用机械执行机构的密度可控三维测量方法。
背景技术:
1、基于其诸多优势,如非接触操作、价格实惠和高精度,基于视觉的3d测量技术在质量检验和逆向工程等领域得到了广泛应用。线轮廓传感器(lps)由于其高采集频率、简单性和成本效益,在3d测量领域占据重要地位。近年来,工业机器人的广泛应用极大推动了机载3d视觉技术的发展。
2、近年来随机械臂的不断发展。机械臂挂载lps组成三维测量系统得到了广泛的应用,机械臂的灵活性配合高效的lps可以获得各种外形复杂的工件外形。但是在目前的系统中较多的关注测量路径的规划以及手眼标定的校准,少有系统关注测量中lps的采集密度。在相同的测量路径上,单位路径长度内采集的点云信息越多对物体的外形重建效果越好,尤其是细节丰富的工件;但是现在的该类测量系统并未关注该问题。除此之外,现有系统lps和机械臂之间通常采用线缆直接连接达到两者协作工作的目的,不仅影响了安装部署便利性,还需要机械臂与lps之间具有互通的硬件协议。
3、本发明中开发了一个模块化三维测量系统,该系统采用安装在通用机械臂上的高效lps捕捉工件的3d点云。本系统建立一个通用的机械臂与lps协作框架,分离机械臂和lps之间的线缆连接。通过我们的协作方式可以将任意lps与机械臂进行组合,快捷的搭建起测量设备执行测量任务。为了提高采集的点云密度提出了一种高效便捷的方法来获取高密度点云的方式,进一步的还基于本发明方法提出了控制点云密度的方法。我们对系统的进行了实验验证,最终证明我们提出的协作方法的可行性和密度可控方法的正确性和灵活性。
技术实现思路
1、本发明解决的技术问题:采用高低频率的协作策略进行软同步,采用低密度数据进行插值的方法,以生成满足不同密度要求的点云,从而基于lps和通用机械执行机构的实现了密度可控的三维测量方法。
2、技术方案:为了解决上述技术问题,本发明采用的技术方案如下:
3、一种基于lps和通用机械执行机构的密度可控三维测量方法,包括以下步骤:
4、步骤(1):配置三维测量系统;
5、三维测量系统包括线轮廓传感器、法兰板和机械臂底座,线轮廓传感器安装在机械臂的法兰板上;
6、步骤(2):获取lps数据和机械臂数据,并对数据进行转换;
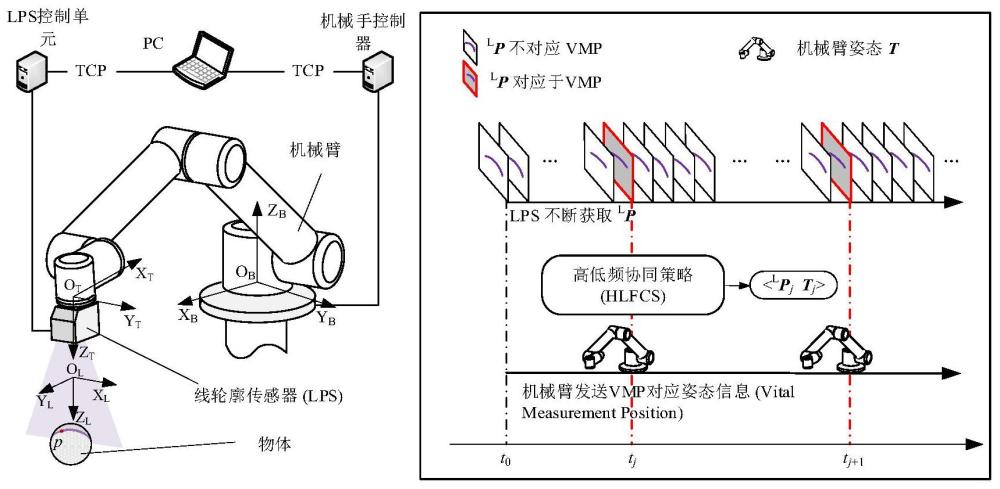
7、步骤(3):采用多线程算法策略实现lps和机械臂之间的软同步;并采用高低频协同策略解决频繁触发导致的同步延迟;
8、步骤(4):生成密度可控的点云;
9、首先,生成点云骨架;然后,基于点云骨架生成密集点云,点云骨架作为插值方法的基础来生成新截面-位姿数据对,通过调整新截面-位姿数据对的数量,灵活地控制点云的密度。
10、进一步地,步骤(2)中,每条lps数据,定义为lp,代表一个二维轮廓,lp位于{ol-xlylzl}内的xlolzl平面;
11、每条机械臂数据定义为机械臂位姿t,代表一个位置,在这个位置上,机械臂的末端携带着lps沿着物体表面运动,机械臂位姿t由旋转矩阵和平移矢量组成,所有的机械臂位姿存储与散列表构成集合
12、lps数据lp通过公式(1)直接扩展到三维空间,利用公式(2)的链式变换法则,将lps数据lp变换为{ob-xbybzb};
13、lp={pi(x,0,z)|i=1,2,...,n} (2)
14、
15、其中,和为机械臂法兰坐标系{ot-xtytzt}向机械臂基坐标系{ob-xbybzb}转换使用的旋转矩阵与平移矢量,bp为lp转换至{ob-xbybzb}坐标系中的结果,和由机械臂控制器得到;和表示lps坐标系{ol-xlylzl}向机械臂法兰坐标系{ot-xtytzt}转换使用的旋转矩阵与平移矢量,由手眼校准得到。
16、进一步地,步骤(3)中,当机械臂开始运动时,将lps数据lp与机械臂位姿t同时关联起来,需要采集同步触发器;
17、每个lps数据lp都存储在带有key的散列列表中构成集合中,key是每个lp唯一的序列号;lps数据lp和机械臂位姿t之间的同步涉及建立和之间映射的过程,表示为h:同时创建两个并行线程,一个用于高频获取lps数据lp,另一个用于低频接收机械臂位姿t,key以增量整数的形式分配,作为每个lps数据lp的唯一标识符;负责接收机械臂位姿t的线程只需要读取key就可以将相应的lps数据lp与机械臂位姿t关联起来;
18、触发软同步时,每个key和tkey作为一对<keyi,tkeyi>存储在机械臂位置队列中。
19、进一步地,实现lps和机械臂软同步的方法有两种:a)使用定时器以固定间隔触发;b)设置位置机械臂数控文件中的中断信号;
20、当pc开启采集,pc机捕捉到机械臂发出的信号后,自动触发数据采集,通过这个同步过程,机械臂位姿t和lps数据lp使用相同的key进行关联,产生一定数量的截面-位姿数据对:<lpkey,tkey>,用于生成对象的点云骨架。
21、进一步地,步骤(4)中,点云骨架pcs的组成过程为:
22、步骤4.1:从机械臂位姿中获取数据对<key,tkey>,并且从lps数据列表中通过key来获取lps数据lp;
23、步骤4.2:变换lps数据lp坐标系;
24、利用key通过查看lps数据表得到机械臂位姿t对应的lps数据lp,根据公式(3)将tkey对应的lpkey转换为{ob-xbybzb}坐标系;
25、
26、式中,和为key对应的机械臂位姿t所包含的旋转矩阵与平移矢量,和由手眼校准得到,lpkey为key对应的lp,bpkey由lpkey转换至机械臂基坐标系{ob-xbybzb}得到;对象的点云骨架pcs由bpkey组成,点云骨架pcs的数据保存在一个新的哈希表中,每个key对应一个由bpkey和tkey组成的数据对。
27、进一步地,步骤(4)中,采用线性插值方法来评估所有ti与每个相邻vmp之间的lpi关联,lpi表示由lps采集到的任意一条截面数据,ti表示该截面数据对应的机械臂位姿,由旋转矩阵ri和平移矢量ti组成,采用四元数进行位姿插值:
28、给定轴向角a=(θ,u),其中u=(nx,ny,nz),其对应的四元数q表示为公式(7);相邻两个t之间归一化四元数线性插值公式表示为公式(5)。
29、
30、
31、其中,qτ表示插值得到的四元数,和为相邻两个vmp和中的机械臂姿态和对应的四元数形式,式中四元数均为归一化形式,τ是插值的比值,将根据两个vmp之间lpi的个数来计算,τ∈[0,1]。
32、进一步地,平移矢量采用线性插值方法进行插值,公式如式(9);当测量轨迹为平移运动时,只需对平移矢量进行插值;
33、
34、其中,tτ表示插值得到的平移向量,和是两个相邻t的平移向量;
35、假设从pcs中取出两个相邻的vmp的和则两个相邻vmp之间的lp数为n,并且τ=i/n,i=(0,1,…,n)。
36、进一步地,引入变量d来控制插值密度,d是插值后的两个相邻lpi之间的距离,插补数nlerp可由式(7)计算;
37、
38、其中,
39、插值步长定义为g,g=n/nlerp;通过公式(11)计算τ和key;
40、
41、
42、其中,i=(0,1,···,(nlerp-1)),[*]表示舍入到最接近的整数,n表示两个相邻vmp之间的lp数。
43、进一步的,插值完成后,所有lpi都与对应的ti相关联,使用公式(13)生成密集的点云数据,
44、
45、有益效果:与现有技术相比,本发明具有以下优点:
46、(1)本发明基于lps和通用机械执行机构的密度可控三维测量方法,建立了一个由机械臂和lps组成的三维测量系统,旨在为工程应用中获得物体的点云提供一种简单高效的解决方案。
47、(2)本发明采用多线程算法策略确保lps和机械臂之间的软同步,两线程独立运行。多线程算法策略的一个显著优点是其灵活性和适应性,不需要在lps和机械臂之间进行线缆连接。
48、(3)lps数据的采集速度比机械臂位姿传输速率更快,因此只有少数lps数据lp可以与机械臂位姿t相关联,本发明将这些数据以<lpj,tj>的形式配对,这些触发软同步的特定时间点tj(j=1,2,…,n)对应的测量位置被称作重要测量位置(vmp)。通过利用重要测量位置(vmp)和点云骨架(pcs)概念,有效地利用了lps功能,实现了点云的密度可控。
49、(4)本发明采用高低频协同策略(hlfcs)解决频繁触发会导致同步延迟的问题。高低频协同策略(hlfcs)消除了lps和机械臂之间的有线电缆连接,确保了系统的灵活性和施工方便性。高低频协同策略的核心思想是充分利用lps采集性能,同时最小化同步时间消耗。hlfcs确保了lps和机械臂之间的高效同步,减少了ram的使用,并允许lps以高频率获取数据,而不是低频率传输机械臂位置。
50、(5)实验结果证明了本发明的有效性和多功能性,它可以应用于使用替代安装设备的各种场景,如cmm或多轴机床,等任何支持tcp通信协议的运动平台。总的来说,该系统为在广泛的工程应用中高效获取点云提供了一个实用且适应性强的解决方案。
- 还没有人留言评论。精彩留言会获得点赞!