一种激光扫描仪系统误差标定选靶方法、系统及存储介质
本发明涉及激光扫描仪标定优化设计,具体涉及一种激光扫描仪系统误差标定选靶方法、系统及存储介质。
背景技术:
1、三维激光扫描仪是一种新型的空间信息快速采集设备,可主动感知环境物体的距离和方位。同传统测绘手段相比,该技术具有测量速度快、精度高,全天时工作,数据表达容易,操作方便等优点。随着激光、计算机等技术的不断提高,越来越多的高精度测量领域开始引入这一高新设备。但由于制造与安装误差的影响,成品与设计原型间存在不可避免的系统误差,此误差的检校精度直接影响数据质量。现有研究常通过变换标靶的特征样式、材料或检校模型等方式提高系统误差标定的精度。然而,通过定量分析每个标靶对系统误差标定精度影响的方式还未曾研究。
技术实现思路
1、鉴于上述问题,本发明提出一种激光扫描仪系统误差标定选靶方法、系统和存储介质。旨在定量分析每个标靶对系统误差检校精度的影响,从而选择出最佳的标靶组合,提高三维扫描仪系统误差的检校精度。
2、本发明采用如下技术方案:
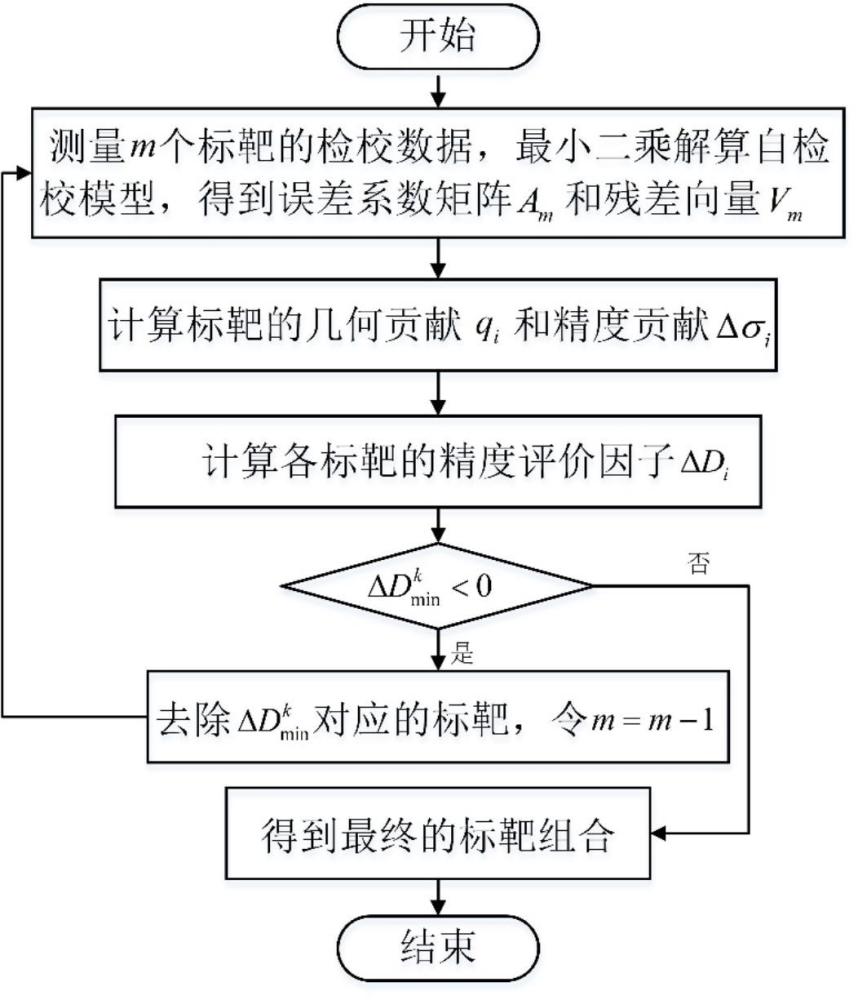
3、一种激光扫描仪系统误差标定选靶方法,包括如下步骤:
4、步骤s1:用三维扫描仪扫描室内环境点云,利用圆拟合算法得到每个标靶的中心在三维扫描仪坐标系下的测量数据;利用高精度全站仪依次测量标靶中心在全站仪坐标系下的三维坐标,将同一标靶的中心在三维扫描仪坐标系下的测量数据和全站仪坐标系下的三维坐标作为同名点对;
5、步骤s2:将 m个标靶的同名点对作为三维激光扫描仪系统误差检校模型的输入得到自检校模型方程并线性化利用最小二乘原理解算误差方程,得到误差系数矩阵和残差向量;
6、步骤s3:计算每个标靶的几何贡献和精度贡献,并计算每个标靶的精度评价因子;
7、步骤s4:将所有标靶的精度评价因子排序,得到最小精度评价因子,剔除最小精度评价因子小于0对应的标靶;
8、步骤s5:令,重新解算模型参数,得到新的误差系数矩阵和残差向量,重复步骤s1-s4,直至最小精度评价因子大于或等于0时,停止选靶,得到最佳标靶组合。
9、进一步地,所述步骤s1中每个标靶的中心在三维扫描仪坐标系下的测量数据如下:
10、每个标靶的中心在高精度全站仪坐标系下的三维坐标如下:
11、其中,, m表示标靶的数量,表示第 i个标靶的中心在三维扫描仪坐标系下的测量数据中的测距值,表示第 i个标靶的中心在三维扫描仪坐标系下的测量数据中的水平角,表示第 i个标靶的中心在三维扫描仪坐标系下的测量数据中的高度角;表示第 i个标靶的中心在高精度全站仪坐标系下的x轴坐标,表示第 i个标靶的中心在高精度全站仪坐标系下的y轴坐标,表示第 i个标靶的中心在高精度全站仪坐标系下的z轴坐标。
12、进一步地,所述步骤s2中三维激光扫描仪系统误差检校模型为:
13、
14、
15、
16、
17、
18、
19、其中, 误差自检校模型共计13个参数,为测距加常数,为测距乘常数,分别表示三维扫描仪坐标系向全站仪坐标系转换时x轴的旋转参数、y轴旋转参数、z轴的旋转参数,分别表示三维扫描仪坐标系向全站仪坐标系转换时x方向的平移参数、y方向的平移参数、z方向的平移参数,为反光镜镜面与横轴坐标系x轴的夹角,分别为激光出射方向与横轴坐标系的夹角,为激光从横轴坐标系到纵轴坐标系的旋转角,表示三维扫描仪坐标与全站仪坐标间的旋转矩阵,表示扫描仪纵轴旋转矩阵,与分别表示扫描仪横轴坐标系先后沿x轴和y轴转到纵轴坐标系的旋转矩阵,表示激光向量经反光镜反射矩阵。
20、进一步地,所述步骤s2中依据三维激光扫描仪系统误差标定模型构建目标函数:
21、
22、将其在处进行泰勒级数展开,取一次项,得线性化公式:
23、
24、其中,为自检校模型中各参数的改正数,为函数对各参数的偏导数,的表达式为:
25、
26、其中,为各检校模型参数的初值,为扫描仪坐标经参数初值解算的全站仪坐标;
27、构建误差方程:
28、
29、为第 i个标靶的坐标残差,简化为:
30、式中为系统误差改正数,为坐标差常数项,为x方向的坐标差常数项,为y方向的坐标差常数项,为z方向的坐标差常数项,为误差方程系数矩阵,为常数项,为坐标残差向量,
31、
32、
33、。
34、进一步地,第个标靶的几何贡献为:
35、
36、式中,为单位阵,,,为第个标靶的误差方程系数,为的转置;
37、第个标靶的精度贡献为:
38、
39、式中,为个标靶解算的坐标残差,为去除第个标靶后个标靶的坐标残差,分别表示第个标靶的坐标残差分量,分别表示去除第个标靶后剩余标靶解算的第个标靶的坐标残差分量。
40、进一步地,所述步骤s3中标靶的精度评价因子为去除标靶后,参数解算误差的变化量:
41、
42、式中,为个标靶的gdop,为个标靶解算的坐标残差;
43、gdop定义为,
44、则。
45、进一步地,还包括:将输出的所选标靶作为最终用于扫描仪系统误差检校的标靶组合,将所选标靶的同名点对代入步骤s1中的自检校模型,根据最小二乘原理迭代解算模型参数,完成设备检校。
46、进一步地,所述标靶为方形标靶或嵌套圆标靶。
47、另一方面,本发明还提供一种基于精度评价因子的激光扫描仪标定选靶系统,包括:
48、同名点对生成模块:用三维扫描仪扫描室内环境点云,利用圆拟合算法得到每个标靶的中心在三维扫描仪坐标系下的测量数据;利用高精度全站仪依次测量标靶中心在全站仪坐标系下的三维坐标,将同一标靶的中心在三维扫描仪坐标系下的测量数据和全站仪坐标系下的三维坐标作为同名点对;
49、误差系数矩阵和残差向量生成模块:用于将 m个标靶的同名点对作为三维激光扫描仪系统误差检校模型的输入得到自检校模型方程并线性化利用最小二乘原理解算误差方程,得到误差系数矩阵和残差向量;
50、精度评价因子计算模块:用于计算每个标靶的几何贡献和精度贡献,并计算每个标靶的精度评价因子;
51、标靶剔除模块:用于将所有标靶的精度评价因子排序,得到最小精度评价因子,剔除最小精度评价因子小于0对应的标靶;
52、最佳标靶组合生成模块:令,重新解算模型参数,得到新的误差系数矩阵和残差向量,重复同名点对生成模块至标靶剔除模块中的步骤,直至最小精度评价因子大于或等于0时,停止选靶,得到最佳标靶组合。
53、再另一方面,本发明提供一种计算机存储介质,所述存储介质中存储有至少一可执行指令,所述可执行指令使处理器执行上述的激光扫描仪系统误差标定选靶方法对应的操作。
54、与现有技术相比,本发明具体如下有益效果:
55、1.从理论上分析了标靶组合对模型参数标定精度的影响,直观地了解标靶的几何特征和精度特征对参数解算精度的作用机理;
56、2.推导出每个标靶对参数解算误差的几何贡献和精度贡献的具体表达式,综合二者,定义了精度评价因子的概念,定量分析各标靶对系统误差解算精度的影响;
57、3.提出一种激光扫描仪系统误差标定选靶方法,利用精度评价因子定量地分析每个标靶对系统误差解算精度的影响,重复剔除最小精度评价因子小于0对应的标靶,得到最益于系统误差解算的标靶组合。该方法不仅从理论上选出合理的标靶组合,提高参数标定精度,同时剔除了部分标靶,提高了参数标定和解算的效率。
- 还没有人留言评论。精彩留言会获得点赞!