一种基于MBSE模型的探月机器人局部路径规划方法及系统与流程
本发明涉及月球探测路径规划,尤其涉及一种基于mbse模型的探月机器人局部路径规划方法及系统。
背景技术:
1、mbse(model-based systems engineering)即基于模型的系统工程,用于支持系统需求、设计、分析、检验和验证活动,具有整合多学科环境、覆盖整个寿命周期、使用标准化的语言、自动化的环境以及与仿真结合等特点,近年来已得到广泛的应用。
2、在基于mbse模型的探月机器人建模时,除了常规的系统设计,更需要考虑复杂且未知的月球环境,探月机器人要求具备自主导航的能力,才能有效执行任务。路径规划是实现自主导航的关键技术,它可以帮助探月机器人根据环境信息和任务需求,自主生成从起始点到目标点的最优或次优路径。
3、现有技术中对于探月机器人路径规划的主要方法包括人工势场法、遗传算法、动态窗口法(dwa)、基于搜索的方法、基于优化的方法、基于学习的方法等。但是这些各有优缺点,往往需要将不同的规划方法结合起来,以提高路径规划的效果和鲁棒性,这就导致了路径规划的效率降低、计算量增大,进而影响了mbse模型的运行速度,同时出现探月机器人路径规划实时性差、能耗高、可靠性低、建模成本高和难度大的问题。
4、因此,在基于mbse模型的探月机器人建模时,如何设计一种算法简单、效果好的探月机器人路径规划方法,是本领域技术人员仍需不断研究的方向。
技术实现思路
1、本发明提供一种基于mbse模型的探月机器人局部路径规划方法及系统,以解决现有的探月机器人建模时,路径规划计算量大、建模成本高和难度大,影响mbse模型运行速度的问题。
2、一种基于mbse模型的探月机器人局部路径规划方法,具体包括如下步骤:
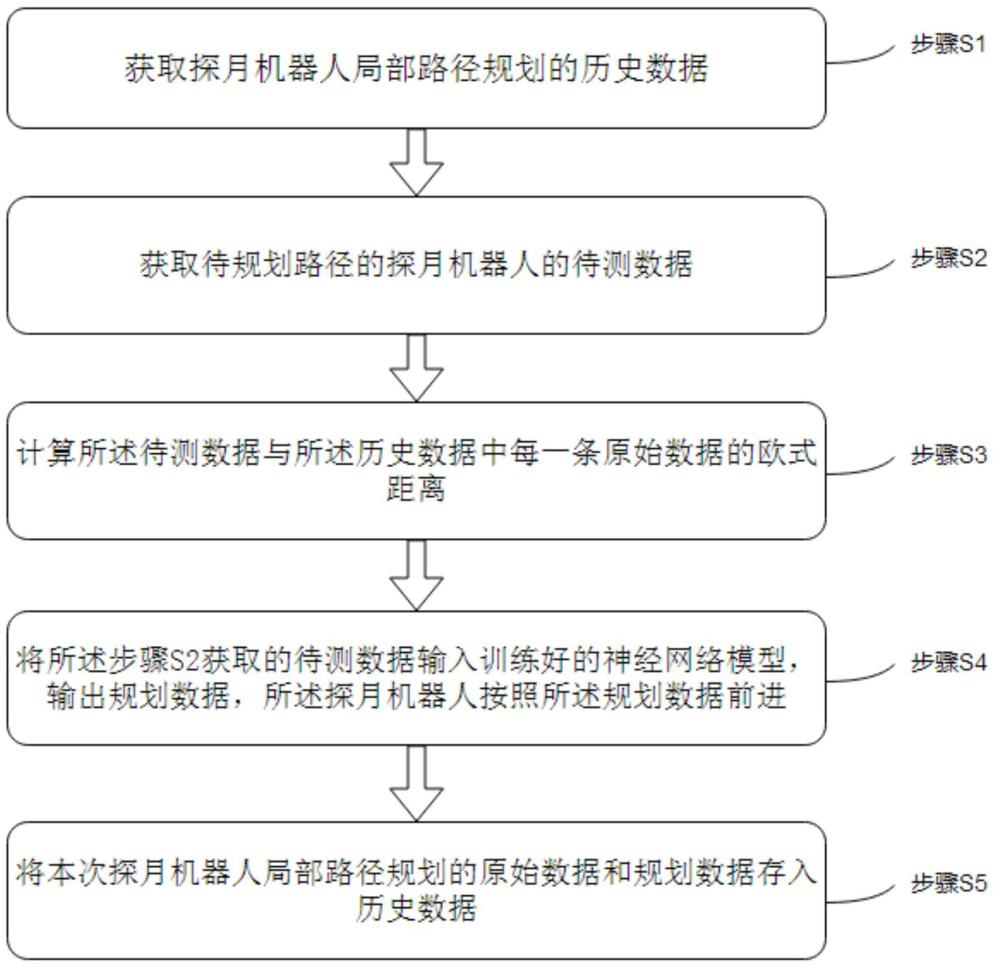
3、步骤s1,获取探月机器人局部路径规划的历史数据,包括:原始数据和规划数据,所述原始数据包括:路径规划时探月机器人的速度参数、探月机器人的位置参数、探月机器人的几何参数、探月机器人的最大速度参数,障碍物的位置参数、障碍物的几何参数,目标点位置参数,所述规划数据包括:规划的局部路径和探月机器人的运行参数;
4、步骤s2,获取待规划路径的探月机器人的待测数据,包括探月机器人的当前速度参数、探月机器人的当前位置参数、探月机器人的几何参数、探月机器人的最大速度参数,障碍物的位置参数、障碍物的几何参数,目标点位置参数;
5、步骤s3,计算所述待测数据与所述历史数据中每一条原始数据的欧式距离;若所述欧式距离的最小值小于等于预设最小值,则获取所述欧式距离对应的规划数据,所述探月机器人按照该规划数据前进;若所述欧式距离大于预设最小值,则进入步骤s4;
6、步骤s4,将所述步骤s2获取的待测数据输入训练好的神经网络模型,输出规划数据,所述探月机器人按照所述规划数据前进;所述神经网络模型采用循环神经网络模型;所述神经网络模型的训练方法为:
7、步骤s41,对步骤s1获取的历史数据进行评估,将满足评估要求的历史数据作为样本数据;
8、步骤s42,通过所述样本数据对所述神经网络模型进行训练,得到训练好的神经网络模型;所述神经网络模型的输入为所述原始数据,输出为所述规划数据;
9、步骤s5,将本次探月机器人局部路径规划的原始数据和规划数据存入历史数据。
10、进一步的,所述步骤s3,欧式距离的计算公式为:
11、;
12、其中,oj为第j个原始数据与待测数据的欧式距离,n为每个原始数据中参数数据的个数,xij为第j个原始数据中第i个参数数据,xi0为待测数据中第i个参数数据。
13、进一步的,所述步骤s4中,循环神经网络模型的结构为:
14、输入层维度为7,输出层维度为2,隐含层神经元数量为24,批处理大小为32,学习率为0.001,迭代次数为100,优化器为adam。
15、进一步的,所述步骤s4中,循环神经网络模型的损失函数为交叉熵损失函数。
16、进一步的,所述步骤s41中,对步骤s1获取的历史数据进行评估,采用的评估函数为:
17、;
18、其中,p为评估值,r1为当前速度归一化后的值,ω1为当前速度的权重,r2为当前路径中拐点数量归一化后的值,ω2为当前拐点数量的权重,r3为当前路径与障碍物的最近距离归一化后的值,ω3为当前最近距离的权重,ω1+ω2+ω3=1。
19、进一步的,ω1和ω3的确定方法为:
20、根据所述探月机器人的当前位置参数、探月机器人的几何参数,障碍物的位置参数、障碍物的几何参数,计算所述探月机器人与所述障碍物的最近距离,根据所述最近距离和预设安全距离的关系,确定评估函数中的ω1和ω3。
21、进一步的,ω1和ω3的关系如下:
22、当所述最近距离大于预设安全距离时,ω1>ω3,当所述最近距离小于等于预设安全距离时,ω1≤ω3。
23、进一步的,所述步骤s41中,评估要求为:当评估值p大于预设评估值p0,则满足要求。
24、一种基于mbse模型的探月机器人局部路径规划系统,所述系统采用如上任一项所述的基于mbse模型的探月机器人局部路径规划方法,具体包括如下模块:
25、历史数据获取模块:获取探月机器人局部路径规划的历史数据,包括:原始数据和规划数据,所述原始数据包括:路径规划时探月机器人的速度参数、探月机器人的位置参数、探月机器人的几何参数、探月机器人的最大速度参数,障碍物的位置参数、障碍物的几何参数,目标点位置参数,所述规划数据包括:规划的局部路径和探月机器人的运行参数;
26、待测数据获取模块:与所述历史数据获取模块连接,用于获取待规划路径的探月机器人的当前数据,包括探月机器人的当前速度参数、探月机器人的当前位置参数、探月机器人的几何参数、探月机器人的最大速度参数,障碍物的位置参数、障碍物的几何参数,目标点位置参数;
27、欧式距离计算模块:与所述待测数据获取模块连接,用于计算所述待测数据与所述历史数据中每一条原始数据的欧式距离;若所述欧式距离的最小值小于等于预设最小值,则获取所述欧式距离对应的规划数据,所述探月机器人按照该规划数据前进;若所述欧式距离大于预设最小值,则进入路径预测模块;
28、路径预测模块:与所述欧式距离计算模块连接,用于将待测数据输入训练好的神经网络模型,输出规划数据,所述探月机器人按照所述规划数据前进;所述神经网络模型采用循环神经网络模型;
29、数据保存模块:与所述路径预测模块连接,用于将本次探月机器人局部路径规划的原始数据和规划数据存入历史数据。
30、与现有技术相比较,本发明的有益效果在于:
31、其一,本发明采用历史数据与神经网络相结合,既充分利用了历史数据的参考作用,又适用于各种参数的情况,降低了路径规划的计算量,提高了mbse模型运行速度,提升了路径规划的效率,节约研发成本;
32、其二,本发明通过计算待测数据与历史数据的欧式距离,当欧式距离小于预设值,则探月机器人按照该历史数据对应的路径参数和运动参数前进,充分利用了历史数据的参考作用,提升了路径规划的效率;
33、其三,本发明在样本数据筛选时,设计了评估函数,根据计算结果对历史数据进行筛选,保留更加优质的历史数据,使得神经网络模型规划的路径和运动参数更加准确,提升了稳定性和鲁棒性;
34、其四,在进行评估函数设计时,充分考虑了探月机器人路径规划重要参数,包括行驶速度、安全距离、拐点数量,确保了任务的高效执行和机器人的安全;
35、其五,本发明对规划的局部路径和探月机器人的运动参数进行评估时,根据最近距离和预设安全距离的关系进行权重值设置,使得在不同情况下都能保证预测结果的最优化。
- 还没有人留言评论。精彩留言会获得点赞!