一种单发双收顶扫云雷达同频干扰识别方法及装置与流程
本发明涉及雷达信号处理,尤其涉及一种单发双收顶扫云雷达同频干扰识别方法及装置。
背景技术:
1、根据雷达的偏振类型可将云雷达分为单发双收雷达和双发双收雷达;偏振是雷达探测电磁波在传播时其电场的振动方向,在水平方向振动的称为水平偏振波,在垂直方向振动的称为垂直偏振波;单发双收是指雷达有一个发射机和两个接收机,只发射单一偏振波,通常情况下是水平偏振波,可以同时接收水平和垂直偏振波;同频干扰是指在雷达系统中,接收机在接收目标雷达回波信号时受到来自相同频率下其他雷达系统或者其他无线信号源的干扰;目前观察到的干扰有直线状、短片状以及干扰麻点的形式,不同的干扰源往往在干扰形状、与地面夹角以及速度大小上有所不同,同频干扰的存在会直接影响雷达数据的观测,同时也会干扰雷达产品的效果。因此,如何对同频干扰进行识别,是目前需要考虑的问题。
技术实现思路
1、本发明的目的在于克服现有技术的缺点,提供了一种单发双收顶扫云雷达同频干扰识别方法及装置,能够对同频干扰进行识别。
2、本发明的目的通过以下技术方案来实现:一种单发双收顶扫云雷达同频干扰识别方法,所述识别方法包括:
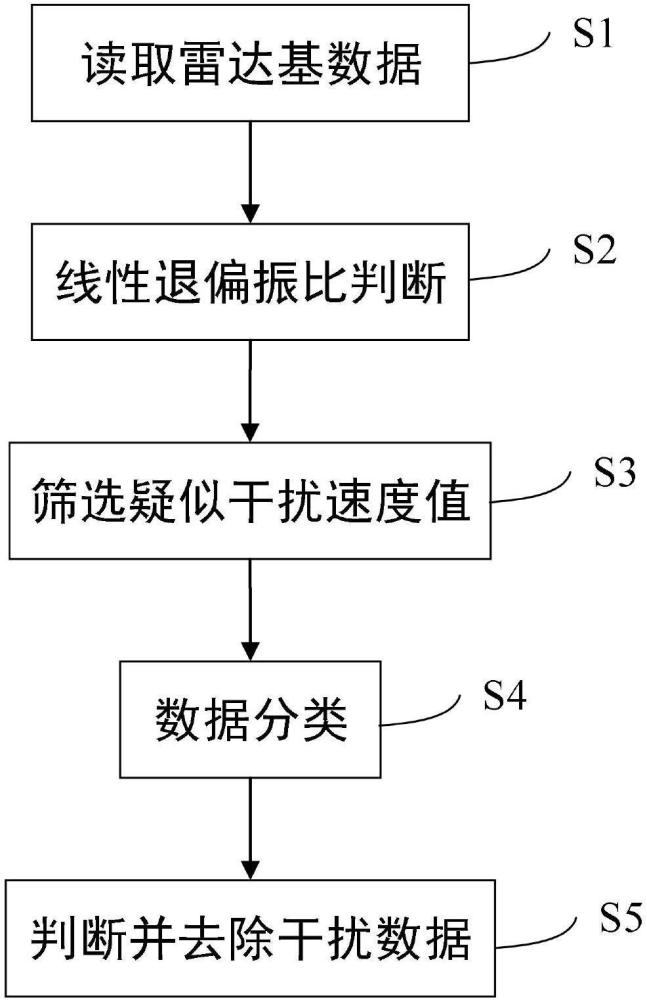
3、数据读取步骤:读取雷达基数据,获取径向速度、谱宽以及线性退偏振比ldr;
4、线性退偏振比判断步骤:判断线性退偏振比数值异常区域前后径向对应距离库有无气象目标,如果没有,则将异常区域对应的速度值赋为无效值;
5、筛选步骤:如果径向上速度绝对值大,速度值变化小且有多个区域上下存在大块无效值区域时,则认为该区域疑似为同频干扰区域,并记录初始速度为疑似干扰速度值;
6、数据分类步骤:根据重复疑似干扰速度值的个数和输入数据的径向数,判断疑似干扰速度值是否为干扰速度值,根据速度与干扰速度值s_data的差距和谱宽的大小将数据分为疑似干扰数据和正常干扰数据;
7、判断去除步骤:判断疑似干扰数据是否为同频干扰,如果是,则将干扰去除,并对数据进行小面积滤波,去除杂点。
8、所述线性退偏振比判断步骤具体包括以下内容:
9、如果径向数i≤n,ldr>m且前后距离库速度赋无效值,则对1到i径向对应距离库赋无效值,n表示设定的径向数值,m表示设定的ldr值;
10、如果径向数i>n,ldr>m且i-n+1、i-n径向对应距离库速度赋无效值,则对i-n+2到i径向对应距离库赋无效值;
11、如果i≤最大径向数-n,ldr>m且i+n-1、i+n径向对应距离库速度赋无效值,则对i到i+n-2径向对应距离库赋无效值;
12、如果径向数i>最大径向数-n,ldr>m且前后距离库速度赋无效值,则对i到最大径向数对应距离库速度赋无效值。
13、所述筛选步骤具体包括以下内容:
14、如果数据区域初始速度绝对值大于等于3,该数据区域有效速度距离库和数据区域前后速度无效区域距离库的数量分别超过20,且数据区域内有效速度与初始速度的绝对值之差小于等于0.5,则认为该数据区域内初始速度值为疑似干扰速度值;
15、如果数据区域初始速度绝对值大于1.5且小于3,该数据区域有效速度距离库数量超过30,前后速度无效区域距离库数量超过20,且数据区域内其余速度与初始速度的绝对值之差小于等于0.3,则认为该数据区域内初始速度值为疑似干扰速度值。
16、所述数据分类步骤具体包括:当谱宽小于预设值时,如果满足以下任意一个条件,则认为对应条件下的数据疑似为同频干扰,标记为疑似干扰数据,其余数据标记为正常数据;
17、条件1:abs(s_data)≥3,且速度与s_data的绝对值之差小于等于1,abs(s_data)表示s_data的绝对值;
18、条件2:2≤abs(s_data)<3,且速度与s_data的绝对值之差小于等于0.5;
19、条件3:1.5≤abs(s_data)<2,且速度与s_data的绝对值之差小于等于0.2;
20、条件4:abs(s_data)<1.5,且速度与s_data相等。
21、所述判断去除步骤具体包括:在径向上,连续疑似干扰数据组成疑似干扰区域,如果疑似干扰区域距离库的前一个距离库速度为无效值或者疑似干扰区域前一个距离库与疑似干扰区域初始距离库之间速度的绝对值之差大,且疑似干扰区域后存在连续的速度无效值区域或者疑似干扰区域末尾数据速度与最近的正常数据速度绝对值之差大,则认为疑似干扰区域为同频干扰区域,将同频干扰区域速度赋无效值;处理完所有同频干扰区域后,对有效数据进行小面积滤波,将连通区域小于预设值的数据赋无效值,去除杂点。
22、一种单发双收顶扫云雷达同频干扰识别装置,它包括数据读取模块、线性退偏振比判断模块、筛选模块、数据分类模块和判断去除模块;
23、所述数据读取模块:用于读取雷达基数据,获取径向速度、谱宽以及线性退偏振比ldr;
24、所述线性退偏振比判断模块:用于判断线性退偏振比数值异常区域前后径向对应距离库有无气象目标,如果没有,则将异常区域对应的速度值赋为无效值;
25、所述筛选模块:用于当径向上速度绝对值大,速度值变化小且有多个区域上下存在大块无效值区域时,则认为该区域疑似为同频干扰区域,并记录初始速度为疑似干扰速度值;
26、所述数据分类模块:用于根据重复疑似干扰速度值的个数和输入数据的径向数,判断疑似干扰速度值是否为干扰速度值,根据速度与干扰速度值s_data的差距和谱宽的大小将数据分为疑似干扰数据和正常干扰数据;
27、所述判断去除模块:用于判断疑似干扰数据是否为同频干扰,如果是,则将干扰去除,并对数据进行小面积滤波,去除杂点。
28、所述线性退偏振比判断模块具体实现以下内容:
29、如果径向数i≤n,ldr>m且前后距离库速度赋无效值,则对1到i径向对应距离库赋无效值,n表示设定的径向数值,m表示设定的ldr值;
30、如果径向数i>n,ldr>m且i-n+1、i-n径向对应距离库速度赋无效值,则对i-n+2到i径向对应距离库赋无效值;
31、如果i≤最大径向数-n,ldr>m且i+n-1、i+n径向对应距离库速度赋无效值,则对i到i+n-2径向对应距离库赋无效值;
32、如果径向数i>最大径向数-n,ldr>m且前后距离库速度赋无效值,则对i到最大径向数对应距离库速度赋无效值。
33、所述筛选模块具体实现以下内容:
34、如果数据区域初始速度绝对值大于等于3,该数据区域有效速度距离库和数据区域前后速度无效区域距离库的数量分别超过20,且数据区域内有效速度与初始速度的绝对值之差小于等于0.5,则认为该数据区域内初始速度值为疑似干扰速度值;
35、如果数据区域初始速度绝对值大于1.5且小于3,该数据区域有效速度距离库数量超过30,前后速度无效区域距离库数量超过20,且数据区域内其余速度与初始速度的绝对值之差小于等于0.3,则认为该数据区域内初始速度值为疑似干扰速度值。
36、所述数据分类模块具体包括:当谱宽小于预设值时,如果满足以下任意一个条件,则认为对应条件下的数据疑似为同频干扰,标记为疑似干扰数据,其余数据标记为正常数据;
37、条件1:abs(s_data)≥3,且速度与s_data的绝对值之差小于等于1;
38、条件2:2≤abs(s_data)<3,且速度与s_data的绝对值之差小于等于0.5;
39、条件3:1.5≤abs(s_data)<2,且速度与s_data的绝对值之差小于等于0.2;
40、条件4:abs(s_data)<1.5,且速度与s_data相等。
41、所述判断去除模块具体包括:在径向上,连续疑似干扰数据组成疑似干扰区域,如果疑似干扰区域距离库的前一个距离库速度为无效值或者疑似干扰区域前一个距离库与疑似干扰区域初始距离库之间速度的绝对值之差大,且疑似干扰区域后存在连续的速度无效值区域或者疑似干扰区域末尾数据速度与最近的正常数据速度绝对值之差大,则认为疑似干扰区域为同频干扰区域,将同频干扰区域速度赋无效值;处理完所有同频干扰区域后,对有效数据进行小面积滤波,将连通区域小于预设值的数据赋无效值,去除杂点。
42、本发明具有以下优点:一种单发双收顶扫云雷达同频干扰识别方法及装置,根据同频干扰和正常回波在速度上的差别,借助线性退偏振比和谱宽等参量,筛选出同频干扰的速度值,找到干扰区域并去除同频干扰,能很好的识别并去除同频干扰,同时正常回波能得到较好地保留,提高了数据的可靠性并为后续数据的观察和处理打下了良好的基础。
- 还没有人留言评论。精彩留言会获得点赞!