针对自主驾驶围绕停放车辆导航的机动计划的方法与流程
[0001]
本公开涉及自主车辆,特别地涉及一种用于相对于停放或静止的车辆导航自主车辆的系统和方法。
背景技术:
[0002]
自主车辆能够相对于车辆移动并且基于其周围环境中的远程车辆的动作来计划其驾驶行为。然而,当在远程车辆后面停放时,自主车辆没有足够的信息来确定远程车辆是临时停放(例如红灯)还是永久停放。如果没有这样的信息,自主车辆可能会无意中发现自己停在停放车辆后面很长时间。因此,期望提供一种用于对静止车辆进行分类并由此针对该静止车辆计划合适的行为的系统和方法。
技术实现要素:
[0003]
在一个示例性实施例中,公开了一种导航自主车辆的方法。远程静止车辆被分类为对象假设。基于对象假设的概率确定自主车辆的可动作行为。经由该可动作行为,相对于远程车辆导航自主车辆。
[0004]
除了本文描述的一个或多个特征之外,该方法还包括计算远程静止车辆的对象假设的概率,针对对象假设将建议行为分配给自主车辆,针对针对建议行为,计算自主车辆的冯
·
诺伊曼-摩根斯坦(von neumann
–
morgenstern)(vnm)成本,基于成本值和对象假设的概率确定针对建议行为的自主车辆的设定成本,并基于设定成本确定可动作行为。在将远程静止车辆分类为多个对象假设的实施例中,该方法进一步包括确定多个对象假设中的每一个的设定成本,基于多个对象假设的设定成本确定总设定成本,以及基于该总设定确定可动作行为。在其中远程静止车辆包括多个远程车辆且每个远程车辆具有多个对象假设的实施例中,该方法还包括确定每个远程车辆的总设定成本,以及使用该总设定成本确定用于自主车辆的可动作行为。该方法还包括使用运动学数据和与远程静止车辆有关的感知数据对远程静止车辆进行分类。该方法还包括将第一卡尔曼滤波器应用于运动学数据以确定远程静止车辆是非停放车辆的可能性,将第二卡尔曼滤波器应用于运动学数据以确定远程静止车辆是停放车辆的可能性。对象假设包括基于远程静止车辆的当前状态的空间假设和基于远程静止车辆的预测的未来运动的预测假设。
[0005]
在另一个示例性实施例中,公开了一种用于导航自主车辆的系统。该系统包括一个或多个用于获得关于远程静止车辆的数据的传感器,以及处理器。该处理器被配置为基于所述数据将所述远程静止车辆分类为对象假设,基于所述对象假设的概率确定所述自主车辆的可动作行为,并且经由该可动作行为相对于所述远程车辆导航所述自主车辆。
[0006]
除了本文所述的一个或多个特征之外,处理器还被配置为计算远程静止车辆的对象假设的概率,针对该对象假设将建议行为分配给自主车辆,针对建议行为,计算自主车辆的冯
·
诺伊曼-摩根斯坦(vnm)成本值,基于成本值和对象假设的概率确定针对建议行为的自主车辆的设定成本,并基于该设定成本确定可动作行为。在将远程静止车辆分类为多个
对象假设的实施例中,处理器还被配置为确定多个对象假设中的每一个的设定成本,基于多个对象假设的设定成本来确定总设定成本,以及基于该总设定成本确定可动作行为。在其中远程静止车辆还包括多个远程车辆且每个远程车辆具有多个对象假设的实施例中,处理器还被配置为确定每个远程车辆的总设定成本并使用该总设定成本来确定该自主车辆的可动作行为。处理器还被配置为使用运动学数据和与远程静止车辆有关的感知数据对远程静止对象进行分类。处理器还被配置为将第一卡尔曼滤波器应用于运动学数据以确定远程静止车辆是非停放车辆的可能性,并且将第二卡尔曼滤波器应用于运动学数据以确定远程静止车辆是停放车辆的可能性。处理器还被配置为基于远程静止车辆的当前状态从至少一个空间假设和基于远程静止车辆的预测的未来运动的预测假设形成对象假设。
[0007]
在又一示例性实施例中,公开了一种自主车辆。该自主车辆包括一个或多个用于获得关于远程静止车辆的数据的传感器,以及处理器。所述处理器被配置为基于所述数据将所述远程静止车辆分类为对象假设,基于所述对象假设的概率确定所述自主车辆的可动作行为,并且经由所述可动作行为相对于所述远程车辆导航所述自主车辆。
[0008]
除了本文所述的一个或多个特征之外,处理器还被配置为计算远程静止车辆的对象假设的概率,针对对象假设将建议行为分配给自主车辆,针对建议行为,计算自主车辆的冯
·
诺伊曼-摩根斯坦(vnm)成本值,基于成本值和对象假设的概率来确定针对建议行为的自主车辆的设定成本,并基于该设定成本确定所述可动作行为。在将远程静止车辆分类为多个对象假设的实施例中,处理器还被配置为确定每个对象假设的设定成本,基于多个对象假设的设定成本来确定总设定成本,并基于总设定成本确定可动作行为。在其中远程静止车辆还包括多个远程静止车辆且每个远程静止车辆具有多个对象假设的实施例中,处理器还被配置为确定每个远程车辆的总设定成本并使用该总设定成本来确定自主车辆的可动作行为。处理器还被配置为使用运动学数据和与远程静止车辆有关的感知数据对远程静止对象进行分类。处理器还被配置为将第一卡尔曼滤波器应用于运动学数据以确定远程静止车辆是非停放车辆的可能性,并且将第二卡尔曼滤波器应用于运动学数据以确定远程静止车辆是停放车辆的可能性。
[0009]
当结合附图考虑时,根据以下详细描述,本公开的上述特征和优点以及其他特征和优点将显而易见。
附图说明
[0010]
在下面的详细描述中,仅以示例的方式出现其他特征、优点和细节,该详细描述参考附图,在附图中:
[0011]
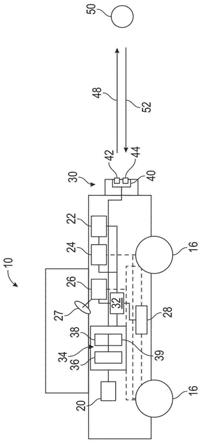
图1示出了示例性实施例中的自主车辆;
[0012]
图2a示出了第一交通场景(scenario)的平面图,其中,图1的自主车辆正在从后面接近未停放或暂时停止的远程车辆;
[0013]
图2b示出了第二交通场景的平面图,其中,自主车辆正在从后面接近停放或永久停止的远程车辆;
[0014]
图3示出了用于对远程车辆的状态进行分类的方法的示意图;
[0015]
图4示出了用于确定自主车辆处的可动作行为的方法的流程图;
[0016]
图5示出了用于示出本文公开的方法的操作的图示场景;和
[0017]
图6示出了示意图,该示意图示出了用于基于图5所示场景的远程车辆的分类概率来选择自主车辆的可动作行为的方法的示意图。
具体实施方式
[0018]
以下描述本质上仅是示例性的,并不旨在限制本公开、其应用或用途。应当理解,在所有附图中,相应的附图标记表示相同或相应的部件和特征。
[0019]
根据示例性实施例,图1示出了自主车辆10。在示例性实施例中,自主车辆10是所谓的四级或五级自动化系统。四级系统表示“高度自动化”,是指由自动驾驶系统对动态驾驶任务的所有方面的驾驶模式特定性能,即使驾驶员没有适当地干预要求也是如此。五级系统表示“完全自动化”,是指由自动驾驶系统在可由驾驶人员管理的所有道路和环境条件下动态驾驶任务各个方面的全时性能。应当理解,本文公开的系统和方法也可以与以1至5级中的任何一个操作的自主车辆一起使用。
[0020]
自主车辆10通常至少包括导航系统20、推进系统22、传动系统24、转向系统26、制动系统28、传感器系统30、致动器系统32和控制器34。导航系统20确定用于自主车辆10的自动驾驶的道路等级路线计划。推进系统22提供动力以为自主车辆10产生动力,并且在各种实施例中可以包括内燃机、电机,例如牵引马达和/或燃料电池推进系统。传动系统24构造成根据可选择的速比将动力从推进系统22传递到自主车辆10的两个或更多个车轮16。转向系统26影响两个或更多个车轮16的位置。尽管出于说明性目的示出为包括方向盘27,但是在本发明范围内预期的一些实施例中,转向系统26可以不包括方向盘27。制动系统28构造成向两个或更多个车轮16提供制动扭矩。
[0021]
传感器系统30包括雷达系统40,该雷达系统感测自主车辆10的外部环境中的对象,并提供该对象的各种参数,这些参数可用于在自主车辆的环境中定位各种远程车辆的位置和相对速度。可以将这样的参数提供给控制器34。在操作中,雷达系统40的发送器42发出射频(rf)参考信号48,该信号在自主车辆10处被雷达系统40的视野中的一个或多个对象50反射回来作为一个或多个反射回波信号52,其在接收器44处被接收。一个或多个回波信号52可用于确定一个或多个对象50的各种参数,诸如对象的范围,对象的多普勒频率或相对径向速度,以及方位角等。传感器系统30包括用于识别道路特征的附加传感器,例如数字相机。
[0022]
控制器34基于感测系统30的输出为自主车辆10构建轨迹。控制器34可以将轨迹提供给致动器系统32,以控制推进系统22、传动系统24、转向系统26,和/或制动系统28,以便相对于对象50导航自主车辆10。
[0023]
控制器34包括处理器36和计算机可读存储设备或存储介质38。计算机可读存储介质包括程序或指令39,当程序或指令由处理器36执行时,基于传感器系统的输出来操作自主车辆。计算机可读存储介质38可以进一步包括程序或指令39,该程序或指令在由处理器36执行时确定对象50的状态,以允许自主车辆相对于该对象行驶。特别地,处理器可以确定对象50是处于临时停放状态还是永久停放状态,并基于所确定的状态来计划自主车辆的行为。临时停放的车辆是准备在适当的信号(例如,交通信号灯的变化等)时移动的车辆。
[0024]
图2a示出了第一交通场景的平面图200,在该场景中,自主车辆10正在从后面接近未停放或暂时停止的远程车辆210。平面图200示出了具有第一车道202或右车道以及第二
车道204或左车道的道路。自主车辆10和远程车辆210都在第一车道202中。自主车辆10可以基于远程车辆未被停放而相对于远程车辆210采取第一动作。如计划轨迹212所示的,自主车辆10上拉至远程车辆210后面的位置214并停止。
[0025]
图2b示出了第二交通场景的平面图201,在该场景中,自主车辆10正在从后面接近停放或永久停止的远程车辆210,例如已经关闭的车辆。自主车辆10和远程车辆210都在第一车道202中。自主车辆10可以基于停放的远程车辆而相对于远程车辆210采取第二动作。如计划轨迹216所示的,自主车辆10将车道从第一车道202改变为第二车道204,并在第二车道204中超过远程车辆210。
[0026]
自主车辆10使用多个数据输入以确定远程车辆210的状态。例如,自主车辆10在多个时间步长监视远程车辆210的位置和运动学。另外,自主车辆10使用感知数据以获得远程车辆210的可能状态。例如,自主车辆10可以监视用于远程车辆210的制动灯是打开还是关闭。如果制动灯点亮,则很可能远程车辆210未停放。如果刹车灯熄灭,则很可能远程车辆210被停放。
[0027]
类似地,自主车辆10可以观察交通信号灯的状态,并将交通信号灯的状态与远程车辆210的状态进行比较。如果交通信号灯为绿色或指示“行驶”,则远程车辆210保持静止不动,则很有可能会远程车辆被停放。到交通信号灯的距离也会影响概率计算,因为随着远程车辆和交通信号灯之间距离的增加,车辆运动和交通信号灯之间会有延迟。可以通过确定各种道路标志(例如停放标志、停放标志、“禁止停放”标志等)的位置以及远程车辆210与停放收费表(meter)的接近程度来获取其他提示。另外,可以指出远程车辆的类型。例如,可能期望校车具有多个临时停放站,然而,当其静止时,应该将其处理为或分类为停放,以便自主车辆10不会非法通过。另一个指示器可以是远程车辆210的热读数,而“热”温度读数可以指示远程车辆210正在运行,而“冷”温度读数可以指示远程车辆210被停放并且已经关掉。在确定远程车辆210的状态时,图300中的方法使用这些输入的组合(如果可用的话)。
[0028]
图3示出了用于对远程车辆210的状态进行分类的方法的示意图300。分类方法通过将概率值分配给每个可能的远程车辆状态(即,未停放或停放)来提供远程车辆的概率状态。
[0029]
该方法从框302开始,在框302处,在自主车辆10处获得远程车辆数据。该数据包括与可从环境中获得的指示器有关的感知数据304和运动学数据306,该运动学数据是有关远程车辆的运动的数据。感知数据304可以是但不限于本文讨论的各种指示器(即,交通标志、交通灯、远程车辆尾灯、车道标记等)。运动学数据306可以包括例如远程车辆的位置、速度和加速度。感知数据304被提供给概率分类器308,该概率分类器基于感知数据304产生用于远程车辆210处于停放状态的概率值和用于远程车辆处于非停放状态的概率值。运动学数据和感知数据在多个帧或时间步长处获得,并提供给处理器。
[0030]
运动学数据306被提供给两个卡尔曼滤波器,以确定远程车辆210的运动的可能性。卡尔曼滤波器是根据远程车辆210处于停放状态还是非停放状态来设计的。第一卡尔曼滤波器310(即,非停放卡尔曼滤波器)假设用于非停放车辆的不受约束的运动学模型,例如非零速度、加速度和转弯速率。第二卡尔曼滤波器312(即,停放的卡尔曼滤波器)采用约束运动学模型(例如,零速度、零加速度和零转弯速率)。用新数据在每个时间步长更新卡尔曼滤波器,以确定远程车辆处于选定状态的可能性。该可能性用于更新从概率分类器确定的
最终概率。
[0031]
返回到图3,在乘法器314中将远程车辆未停放的概率乘以来自第一卡尔曼滤波器310的似然计算。类似地,将远程车辆停放的概率乘以在乘法器316处来自于第二卡尔曼滤波器的似然计算。两次相乘的结果在框318处用于更新假设概率。
[0032]
使用以下等式组合来自模型的似然度以更新假设概率:
[0033][0034]
其中x是包含轨道位置、运动学和感知特征的轨道数据,l
i
(x|h
i
)是第i个假设的分类器概率和卡尔曼滤波器似然的乘积,并且p
t-1
(h
i
|x
1:t-1
)是前一概率(使用直到时间t-1的数据,其中t是时间步长)。
[0035]
图4示出了用于确定自主车辆10上具有成本效益或可动作行为的方法的流程图400。在框402中,获得了针对一个或多个远程车辆及其相关概率的一个或多个空间假设。空间假设为远程车辆的可能位置提供了与其状态(例如,停放或未停放)相关的概率。在框404中,对于每个空间假设,创建一个或多个预测假设,具有针对每个预测假设的概率。预测假设可在将来的某个时间提供车辆的可能运动。空间假设及其关联的预测假设的组合形成对象假设。在框406中,将空间假设和预测假设中的每一个进行组合,以创建完整一组对象假设。在框408中,为(多个)远程车辆的对象假设导出或分配了一组建议行为。在框410中,假设建议行为是冯
·
诺依曼-摩根斯坦(vnm)有理数,则计算出自主车辆10的较高阶vnm有理数成本值以评估该一组建议行为。在框412中,具有最高效用(即,最低成本值)的该一组提议行为被选择为自主车辆的最佳、最具成本效益或可动作行为。在框414中,通过探索连续动作空间来构造可动作行为的vnm等效物,并且根据该vnm等效物来导航自主车辆。
[0036]
图5示出了用于示出本文公开的方法的操作的说明性场景500。场景500包括自主车辆10和各种远程车辆rv1、rv2和rv3。如所示的,道路段包括两个车道,其中车道502指向第一方向(从a到b的方向),相反的车道504沿与第一方向相反的第二方向(从b到a的方向)行进。假定车道502和车道504中的每一个足够宽,例如双向邻街道,以允许在侧面停放车辆。
[0037]
自主车辆10当前位于车道502中,并获得有关道路中对象或远程车辆的数据。另外,道路包括第一远程车辆rv1、第二远程车辆rv2和第三远程车辆rv3。第一远程车辆rv1在第二远程车辆rv2的后面,第二远程车辆rv2又在第三远程车辆rv3的后面。
[0038]
由于关于远程车辆rv1、rv2、rv3的感知数据的不确定性,对于每个车道方向,每个远程车辆可以被分类为停放假设和非停放假设(空间假设)中的至少一个,其中每个假设具有通过图3所示的算法计算出的与之相关的概率。例如,第一远程车辆rv1被分类为以1.0的概率停放在车道502的侧面。第二远程车辆rv2被分类为以0.4的概率停放在车道502的侧面,被分类为以0.35的概率停放在车道502的中间以及被分类为以0.25的概率停放在相对车道504的侧面。第三远程车辆rv3被分类为以0.5的概率位于车道502的中间,并且以0.5的概率被分类为停放在车道502的侧面。由于第三远程车辆rv3距自主车辆最远,因此有关第三远程车辆的数据是最不可靠的,导致针对第三移出车辆的概率值的奇偶性。
[0039]
图6示出了示意图600,该示意图示出了用于基于图5的远程车辆rv1、rv2和rv3的概率分类来为自主车辆10选择最佳、具有成本效益或可动作行为的方法。该示意图包括第
一列602、第二列604和第三列606。第一列602示出关于第一远程车辆的一组计算。第二列604示出了关于第二远程车辆rv2的一组计算,并且第三列606示出了关于第三远程车辆rv3的一组计算。
[0040]
例如,在第一列602中,在框610中,用于第一远程车辆rv1的对象假设示出为以1.0的概率停放在该侧面。然后,在框612中,基于对象假设(即,停放在车道502的侧面)为自主车辆分配建议的行为。在这种情况下,建议的行为是保持在当前车道中并缓慢移动。在框614中,然后针对建议行为确定用于自主车辆10的空间和时间成本值(来自框612)。关于第一远程车辆rv1,自主车辆10应该在停留在车道502中的同时减速。该建议行为暗示负的纵向加速度(例如,-0.05g),这转化为时间成本(例如,-0.5),以及空间成本(例如[0.5,0,1],其中第一数字表示向左移动的空间成本,第二数字表示沿其当前路径保持的空间成本,第三数字表示移动到右侧的空间成本)。在框616中,从成本值和相应假设的概率确定设定成本。设定成本被计算为假设概率和成本值的乘积。对于第一远程车辆rv1,仅存在一个概率为1的假设。因此,第一移出车辆rv1的总设置时间成本为-0.5。
[0041]
转向列604,针对第二远程车辆rv2的每个可能假设进行计算。在框620中,确定第二远程车辆rv2的第一对象假设,其中第二远程车辆rv2被分类为以概率0.4停放在车道502的侧面上。在框622中,然后,基于框620的第一对象假设,将建议的在车道502中缓慢移动的行为分配给自主车辆。在框624中,然后,基于建议的行为(来自框622),确定自主车辆10的空间和时间成本值。关于第二远程车辆rv2的第一假设,自主车辆会产生时间成本(例如-0.5),对应于-0.05g的纵向加速度,空间成本(例如[0.5,0,1]),对应于停留在当前车道。
[0042]
在框630中,确定第二移出车辆rv2的第二对象假设,其中第二远程车辆rv2被分类为以0.35的概率未停放在车道502的内部。在框632中,基于框630的第二对象假设,为自主车辆10分配改变到车道502的左侧的提议行为。在框634中,基于建议的行为(来自框632),确定自主车辆的空间和时间成本值。关于第二远程车辆rv2的第二假设,由于纵向加速度为-0.2g,因此自主车辆10导致的时间成本为-2,以及空间成本为[0.5,0,1]。
[0043]
在框640中,确定了用于第二移出车辆rv2的第三对象假设,其中第二远程车辆rv2被分类为以0.25的概率停放在对面车道504中。在框642中,基于框640的第三对象假设,为自主车辆10分配了停留在车道502上的建议行为。在框644中,基于建议行为(来自框642)确定了该自主车辆的空间和时间成本值。关于用于第二远程车辆rv2的第三假设,自主车辆10没有导致纵向加速度(例如,纵向加速度成本=0),因此时间成本为0,空间成本为[0.5,0,1]。
[0044]
在框646中,可以确定用于第二远程车辆rv2的总设定成本。该总设定成本是三个假设中每个假设的成本总和。每个假设的成本是与假设关联的概率与假设的成本值的乘积。对于用于第二远程车辆的说明性假设,设定成本计算为-0.9。
[0045]
对第三远程车辆rv3进行类似的计算。转到列606,针对第三远程车辆rv3的每个可能的假设进行计算。在框650中,确定针对第三远程车辆rv3的第一对象假设,其中第二远程车辆rv3被分类为以0.5的概率停放在车道502的侧面上。在框652中,然后,基于框650的第一对象假设,将在车道502上保持慢行的建议行为分配给自主车辆10。在框654中,然后,基于建议的行为(来自框652)来确定用于自主车辆10的空间和时间成本值。关于针对第三远程车辆rv3的第一假设,自主车辆10导致-0.05g的纵向加速度(即,时间成本为-0.5和空间
成本为[0.5,0,1])。
[0046]
在框660中,确定针对第三远程车辆rv3的第二对象假设,其中第三远程车辆rv3被分类为以0.5的概率未停放在车道502的内部。在框662中,基于框660的第二对象假设,将跟随该车辆的建议行为(即,自适应巡航控制(acc))被分配给自主车辆10。在框664中,基于建议的行为(来自框662)确定用于自主车辆的空间和时间成本值。关于针对第三远程车辆rv3的第二假设,自主车辆10导致-0.15g的纵向加速度,这转化为-1.5的时间成本和[0.5,0,1]的空间成本。在框666中,使用关于框616和646讨论的方法来确定用于第三远程车辆rv3的总设定成本。对于针对第三远程车辆的说明性假设,用于rv3的总设定成本被计算为-1。
[0047]
在框668中,基于为远程车辆计算的总设定成本的最小值来计算针对图5所示场景的可动作行为。对于说明性场景,可动作行为考虑与rv3相关的总设定成本(所有总成本的最小值),时间成本为-1,空间成本为[0.5,0,1]。这意味着纵向加速度为-0.1g,其中自主车辆10停留在当前车道(车道502)上。
[0048]
尽管已经参考示例性实施例描述了以上公开,但是本领域技术人员将理解,在不脱离本发明范围的情况下,可以进行各种改变并且可以用等同物代替其要素。另外,在不脱离本公开的实质范围的情况下,可以做出许多修改以使特定情况或材料适应本公开的教导。因此,意图是本公开不限于所公开的特定实施例,而是将包括落入其范围内的所有实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1