使用无人机确定物体位置的系统和方法与流程
本公开实施例总体上涉及目标物体识别,更具体地,涉及使用无人机(uav)技术确定目标物体的位置信息的系统和方法。
背景技术:
1、可移动物体可用于执行军事和民用应用中的监视、侦察和探索任务。无人飞行器(uav)(例如,无人机)是可移动物体的一个示例。可移动物体可以承载有效载荷,以用于执行例如获取可移动物体周围环境的图像和视频的特定功能,或用于跟踪特定目标(例如,目标物体)。例如,可移动物体可以跟踪在地面或空中移动的目标物体。通常由可移动物体从远程设备接收和/或由可移动物体确定用于控制可移动物体的移动控制信息。
技术实现思路
1、uav技术的进步使得uav航空摄影和摄像成为可能。如果用户打算使用uav航空摄影和摄像获取特定目标物体的图像和/或视频,则用户需要向uav提供目标物体的精确位置信息。如果用户不知道目标物体的位置信息,和/或如果目标物体包括没有固定位置坐标的移动物体,这将特别具有挑战性。
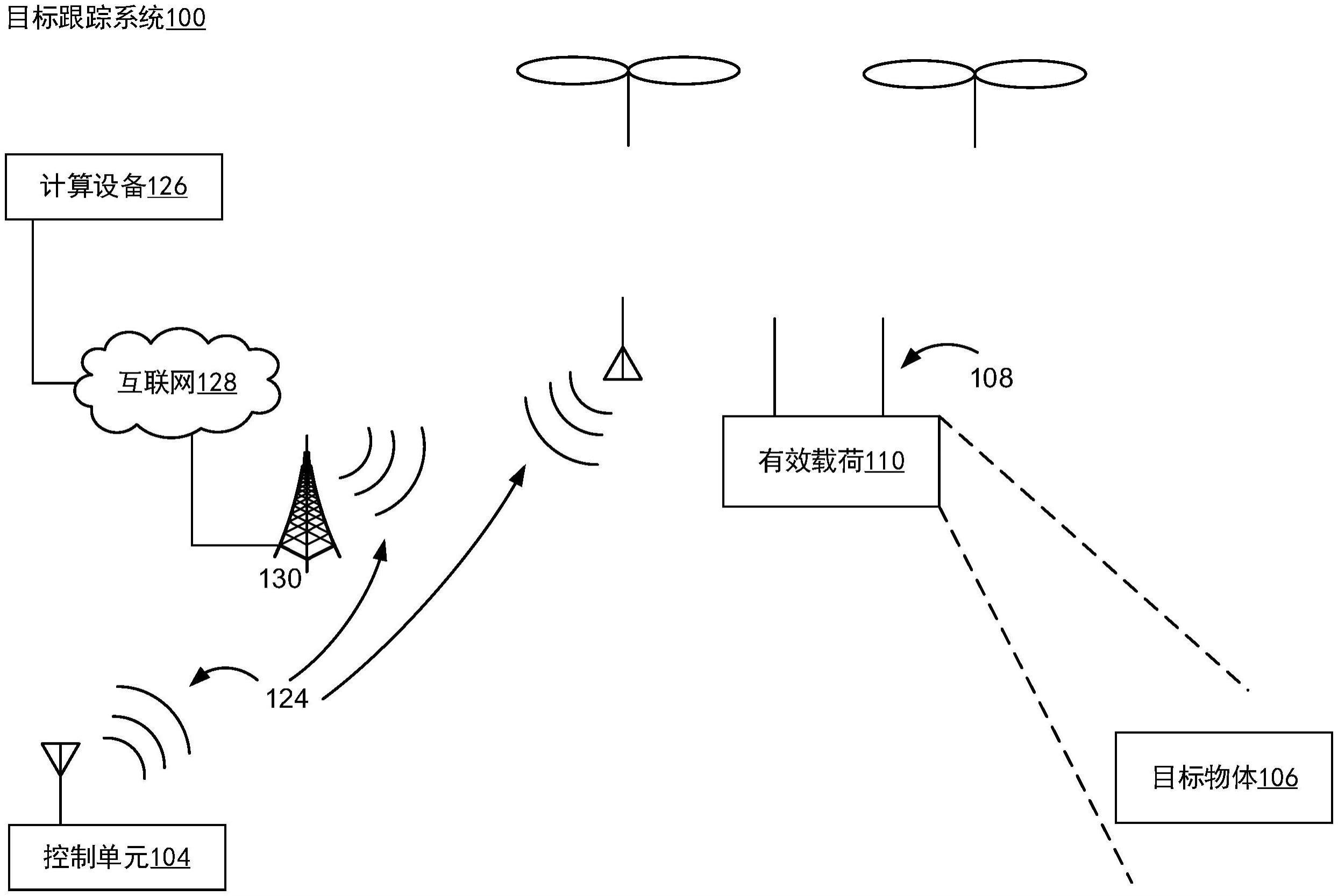
2、因此,需要改进的系统、设备和方法,以轻松精确地确定目标物体的位置(例如,位置坐标),并就目标物体的位置与uav通信,从而使uav能够获取目标物体的图像和/或视频。本文中公开的各实施例描述了与电子设备通信连接的uav。uav从电子设备接收无线信号,并至少部分地基于接收到的信号确定目标物体的位置坐标。这样的系统和方法可选地补充或替代了用于目标识别、目标跟踪和/或图像或视频获取的常规方法。
3、根据本公开的一些实施例,提供了一种在无人机(uav)处执行的方法,所述无人机具有位置传感器、图像传感器、一个或多个处理器、以及存储器。所述uav从电子设备接收第一无线信号,所述第一无线信号包括第一照射方向。根据所述第一无线信号,所述uav至少部分地基于所述第一照射方向识别目标物体。所述uav确定所述目标物体的位置坐标。
4、在一些实施例中,至少部分地基于所述第一照射方向识别目标物体还包括:根据所述第一无线信号,所述uav将所述图像传感器朝向所述第一照射方向定向。在将所述图像传感器定向之后,所述uav经由所述图像传感器获得视频数据。所述uav从所述视频数据中确定所述目标物体。所述uav识别所述目标物体。
5、在一些实施例中,从所述视频数据中确定所述目标物体还包括:所述uav从所述电子设备接收包括所述目标物体的图像。所述uav根据所述视频数据中的物体与所述图像中的物体之间的匹配,确定所述目标物体。
6、在一些实施例中,从所述视频数据中确定所述目标物体还包括:所述uav检测所述视频数据中的第一预定义照射模式。所述uav将反映所述第一预定义照射模式的物体识别为所述目标物体。
7、在一些实施例中,所述第一预定义照射模式包括第一时间频率。
8、在一些实施例中,所述第一预定义照射模式包括颜色。
9、在一些实施例中,在确定所述目标物体的所述位置坐标之后,从所述电子设备接收第二无线信号。所述第二无线信号包括不同于所述第一预定义照射模式的第二预定义照射模式。响应于所述第二无线信号,所述uav在无用户发明的情况下,从多个预定义飞行路线中自动选择与所述第二时间频率对应的所述uav的第一飞行路线。一个或多个处理器控制所述uav根据所述第一飞行路线自主飞行。
10、在一些实施例中,控制所述uav根据所述第一飞行路线自主飞行包括:由所述图像传感器获取具有所述图像传感器的视场的视频馈送。
11、在一些实施例中,所述第一无线信号还包括所述电子设备的位置信息。确定所述目标物体的所述位置坐标还包括:所述uav确定所述目标物体相对于所述uav的角度信息。所述uav从所述第一无线信号提取所述电子设备的位置信息。所述uav利用所述电子设备的所述位置信息,确定所述目标物体相对于所述电子设备的角度信息。所述uav利用所述电子设备的所述位置信息、所述uav的位置信息以及所述目标物体相对于所述电子设备和所述uav的所述角度信息,确定所述目标物体的所述位置坐标。
12、在一些实施例中,确定所述目标物体的所述位置坐标还包括:所述uav从所述电子设备接收第三无线信号。所述第三无线信号包括具有规则预定义时间间隔的照射。所述第三无线信号包括所述照射的各个时间。响应于接收到所述第三无线信号,所述uav使用所述图像传感器获取所述照射的视频数据。对于每次照射,所述uav确定所述照射时间和对应的视频数据获取时间之间的时间差。基于所述时间差,所述uav确定所述电子设备与所述目标物体之间的距离以及所述uav与所述目标物体之间的距离。所述uav利用所述电子设备与所述目标物体之间的所述距离、所述uav与所述目标物体之间的所述距离、所述电子设备的位置信息以及所述uav的位置信息,确定所述目标物体的所述位置坐标。
13、在一些实施例中,在接收所述第三无线信号之前,所述uav将所述uav的时钟与所述电子设备的时钟同步。
14、在一些实施例中,确定所述目标物体的所述位置坐标还包括:所述uav查询与所述第一照射方向对应的地图。所述uav从所述地图中确定第一物体。所述uav将所述第一物体指定为所述目标物体。所述uav确定所述第一物体的位置坐标。所述目标物体的所述位置坐标为所述第一物体的所述位置坐标。
15、在一些实施例中,所述第一无线信号还包括所述电子设备的位置信息以及所述电子设备与所述目标物体之间的距离信息。识别所述目标物体还至少部分地基于所述电子设备的所述位置信息以及所述电子设备与所述目标物体之间的所述距离信息。
16、根据本公开的另一方面,提供了一种在电子设备处执行的方法。所述电子设备具有位置传感器、光发射器、一个或多个处理器、以及存储器。所述电子设备沿第一方向朝向目标物体进行照射。基于所述照射,所述电子设备确定所述目标物体与所述电子设备之间的距离。所述电子设备向无人机(uav)传输无线信号。所述无线信号包括所述目标物体与所述电子设备之间的距离并且包括所述电子设备当前的位置和朝向。所述uav被配置为基于所述目标物体与所述电子设备之间的所述距离以及所述电子设备当前的所述位置和朝向,将所述uav的图像传感器朝向所述目标物体定向。
17、在一些实施例中,所述照射包括具有第一时间频率的预定义照射模式。
18、在一些实施例中,所述照射包括具有第一波长的预定义照射模式。
19、在一些实施例中,所述电子设备还包括相机。所述电子设备使用所述相机获取包含所述目标物体的图像。所述电子设备将所述图像传输到所述uav。所述uav被配置为基于所述图像和使用所述uav的所述图像传感器获取的物体的图像的匹配来识别所述目标物体。
20、在一些实施例中,uav包括图像传感器、距离传感器、一个或多个处理器、存储器、以及存储在所述存储器中的一个或多个程序。所述一个或多个程序被配置为由所述一个或多个处理器执行。所述一个或多个程序包括用于执行本文所述任一方法的指令。
21、在一些实施例中,电子设备包括一个或多个处理器、存储器、以及存储在所述存储器中的一个或多个程序。所述一个或多个程序被配置为由所述一个或多个处理器执行。所述一个或多个程序包括用于执行本文所述任一方法的指令。
22、在一些实施例中,提供了一种非瞬时计算机可读存储介质,存储有配置为由具有一个或多个处理器和存储器的无人机uav执行的一个或多个程序。所述一个或多个程序包括用于执行本文所述任一方法的指令。
23、在一些实施例中,提供了一种非瞬时计算机可读存储介质,存储有配置为由具有一个或多个处理器和存储器的电子设备执行的一个或多个程序。所述一个或多个程序包括用于执行本文所述任一方法的指令。
24、由此,公开了能够更加轻松精确地确定目标物体的位置坐标的方法、系统和设备,从而便于使用uav进行航空摄影和摄像。
- 还没有人留言评论。精彩留言会获得点赞!