一种多旋翼无人机的控制方法及装置与流程
本说明书涉及计算机,尤其涉及一种多旋翼无人机的控制方法及装置。
背景技术:
1、目前,无人机通常使用rtk(real-time kinematic,实时动态)载波相位差分技术进行无人机定位。基准站和无人机上安装的流动站同时接收同一时间、同一卫星发射的信号,基准站实时地将测量的载波相位观测值、伪距观测值、基准站坐标等数据,用4g网络传输给运动中的流动站,而流动站通过4g网络接收基准站所发射的信息,将载波相位观测值实时进行差分处理,得到无人机的坐标。
2、在实际应用中,这种方式会受到网络信号的影响,在雨、雪、风、暴等极端天气下,受到电离层、对流层、空气、电磁波等因素的影响,接收到的rtk基站的信号有很大的时延,会导致确定出的无人机的定位数据的准确性降低。并且,无人机降落的的场景主要是在市区,较多的高楼建筑会造成多路径效应,从而造成确定出的无人机的定位数据存在较大的偏差,进而,使得无人机无法进行精准降落。
3、因此,如何能够提高确定出的无人机的定位数据的准确性,从而完成无人机的精准降落,则是一个亟待解决的问题。
技术实现思路
1、本说明书提供一种多旋翼无人机的控制方法及装置,以部分的解决现有技术存在的上述问题。
2、本说明书采用下述技术方案:
3、本说明书提供了一种多旋翼无人机的控制方法,包括:
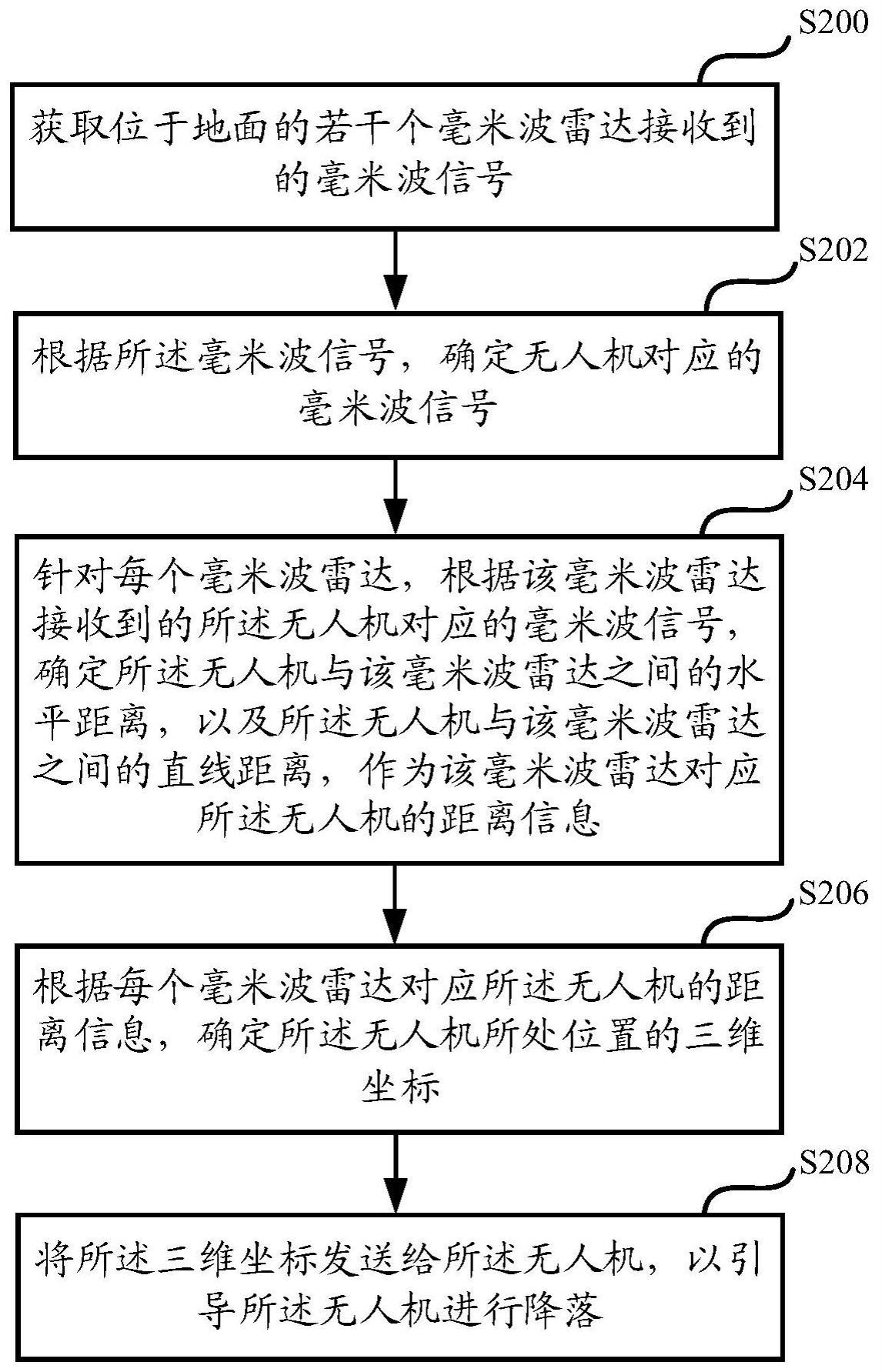
4、获取位于地面的若干个毫米波雷达接收到的毫米波信号;
5、根据所述毫米波信号,确定无人机对应的毫米波信号;
6、针对每个毫米波雷达,根据该毫米波雷达接收到的所述无人机对应的毫米波信号,确定所述无人机与该毫米波雷达之间的水平距离,以及所述无人机与该毫米波雷达之间的直线距离,作为该毫米波雷达对应所述无人机的距离信息;
7、根据每个毫米波雷达对应所述无人机的距离信息,确定所述无人机所处位置的三维坐标;
8、将所述三维坐标发送给所述无人机,以引导所述无人机进行降落。
9、可选地,获取位于地面的若干个毫米波雷达接收到的毫米波信号之前,所述方法还包括:
10、若接收到所述无人机发送的通信连接请求,通过预设的通信连接方式,与所述无人机建立通信连接,所述通信连接请求是所述无人机接收到通信广播信号后发送的,所述通信连接方式包括:wifi连接;
11、针对位于地面的每个毫米波雷达,向该毫米波雷达发送启动指令,以使该毫米波雷达开启雷达扫描。
12、可选地,根据所述毫米波信号,确定无人机对应的毫米波信号,具体包括:
13、确定每个毫米波信号对应的多普勒频谱;
14、将所述多普勒频谱的频宽大于设定频宽阈值的毫米波信号,确定为符合旋翼旋转时产生的毫米波信号,作为所述无人机对应的毫米波信号。
15、可选地,所述无人机上设置的旋翼包含有若干个旋翼叶片;
16、确定所述无人机对应的毫米波信号,具体包括:
17、根据所述旋翼的旋转中心、所述旋翼的转速,以及所述若干个旋翼叶片对应的散射点到所述旋转中心的距离,确定所述若干个旋翼叶片对应的散射点坐标;
18、根据所述若干个旋翼叶片对应的散射点坐标,确定所述无人机对应的散射中心;
19、根据所述无人机对应的散射中心,确定所述无人机对应的散射中心的毫米波信号。
20、可选地,所述毫米波雷达包含有若干个接收天线;
21、根据该毫米波雷达接收到的所述无人机对应的毫米波信号,确定所述无人机与该毫米波雷达之间的水平距离,具体包括:
22、从若干个接收天线中,以一个接收天线为基准,作为基准接收天线;
23、根据所述基准接收天线接收到的所述无人机对应的毫米波信号,以及其他接收天线接收到的所述无人机对应的毫米波信号,确定所述无人机与该毫米波雷达之间的水平距离。
24、可选地,根据所述基准接收天线接收到的所述无人机对应的毫米波信号,以及其他接收天线接收到的所述无人机对应的毫米波信号,确定所述无人机与该毫米波雷达之间的水平距离,具体包括:
25、根据所述基准接收天线接收到的所述无人机对应的毫米波信号、所述其他接收天线接收到的所述无人机对应的毫米波信号,以及所述基准接收天线到所述其他接收天线之间的距离,确定基于所述距离的所述无人机对应的毫米波信号的振幅;
26、根据所述基准接收天线在第一时刻接收到的所述无人机对应的毫米波信号、所述其他接收天线在第二时刻接收到的所述无人机对应的毫米波信号,以及所述第一时刻到所述第二时刻的时间间隔,确定基于所述时间间隔的所述无人机对应的毫米波信号的振幅,所述第二时刻为所述第一时刻的下一时刻;
27、根据基于所述距离的所述无人机对应的毫米波信号的振幅,以及基于所述时间间隔的所述无人机对应的毫米波信号的振幅,确定所述无人机与该毫米波雷达之间的水平距离。
28、可选地,根据每个毫米波雷达对应所述无人机的距离信息,确定所述无人机所处位置的三维坐标,具体包括:
29、针对每个毫米波雷达,根据该毫米波雷达对应所述无人机的距离信息,以该毫米波雷达为坐标原点,确定该毫米波雷达对应的所述无人机的二维坐标;
30、根据各毫米波雷达对应的所述无人机的二维坐标,以及各毫米波雷达对应的位置信息,确定所述无人机的三维坐标。
31、本说明书提供了一种无人机的控制系统,包括:无人机,位于地面上的若干个毫米波雷达以及服务器;
32、所述毫米波雷达,用于向所述服务器发送接收到的毫米波信号;
33、所述服务器,用于获取位于地面的若干个毫米波雷达接收到的毫米波信号,根据所述毫米波信号,确定无人机对应的毫米波信号,针对每个毫米波雷达,根据该毫米波雷达接收到的所述无人机对应的毫米波信号,确定所述无人机与该毫米波雷达之间的水平距离,以及所述无人机与该毫米波雷达之间的直线距离,作为该毫米波雷达对应所述无人机的距离信息,根据每个毫米波雷达对应所述无人机的距离信息,确定所述无人机所处位置的三维坐标,将所述三维坐标发送给所述无人机,以引导所述无人机进行降落。
34、可选地,所述无人机,若接收到所述服务器的通信广播信号,向所述服务器发送通信连接请求;
35、所述服务器,若接收到所述无人机发送的通信连接请求,通过预设的通信连接方式,与所述无人机建立通信连接,并针对位于地面的每个毫米波雷达,向该毫米波雷达发送启动指令,所述通信连接方式包括:wifi连接;
36、所述毫米波雷达,在接收到所述服务器发送的启动指令后,开启雷达扫描。
37、本说明书提供了一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述多旋翼无人机的控制方法。
38、本说明书提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述多旋翼无人机的控制方法。
39、本说明书采用的上述至少一个技术方案能够达到以下有益效果:
40、在本说明书提供的多旋翼无人机的控制方法中。首先,获取位于地面的若干个毫米波雷达接收到的毫米波信号。其次,根据毫米波信号,确定无人机对应的毫米波信号。而后,针对每个毫米波雷达,根据该毫米波雷达接收到的无人机对应的毫米波信号,确定无人机与该毫米波雷达之间的水平距离,以及无人机与该毫米波雷达之间的直线距离,作为该毫米波雷达对应无人机的距离信息。最后,根据每个毫米波雷达对应无人机的距离信息,确定无人机所处位置的三维坐标,并将三维坐标发送给无人机,以引导无人机进行降落。
41、从上述方法中可以看出,本方法可以通过位于地面的若干个毫米波雷达与无人机之间的水平距离,以及直线距离,确定出无人机所处位置的三维坐标,并引导无人机进行降落。相比于现有技术来说,本方法通过位于地面的若干个毫米波雷达,可以在极端天气下确定出无人机较为准确的三维坐标,进而,使得无人机进行精准降落。
- 还没有人留言评论。精彩留言会获得点赞!