适用于LNG薄膜罐施工过程的送风系统、温湿度控制系统及方法与流程
适用于lng薄膜罐施工过程的送风系统、温湿度控制系统及方法
技术领域
1.本发明涉及lng薄膜罐内罐壁面施工技术领域,特别地涉及一种适 用于lng薄膜罐内罐壁面施工过程的送风系统、温湿度控制系统及温湿 度控制方法。
背景技术:
2.lng薄膜罐是一种新型的储罐,其与传统的9%镍钢罐在储罐结构上 存在明显不同。9%镍钢罐由混凝土外罐、绝缘填充层(包括衬板、膨胀珍 珠岩、弹性棉毡等)和9%镍钢板组成,而lng薄膜罐是由混凝土外罐、 绝缘板和不锈钢波纹板组成。绝缘板要依靠特殊的胶粘到混凝土外罐上, 这个施工过程要求在一定的温湿下进行。因此需要设计合理的气流组织形 式及空气温湿度控制系统,使得绝版板安装环境能够满足温湿度控制的要 求。由于织物管道系统在效率方面优于传统管道送风系统,织物管道送风 系统可以更快、更均匀、更有效地对房间局部区域进行空气调节,但应用 于大空间建筑时需要对其送风组织形式进行进一步研究。而在送风温湿度 控制系统中,往往存在系统对外部温湿度变化反应延迟的现象,不能及时 调整送风温湿度,对于这种特殊材料的施工现场往往不能满足其温湿度控 制要求。
技术实现要素:
3.有鉴于此,本发明提出一种适用于lng薄膜罐内罐壁面施工过程的 送风系统、温湿度控制系统及温湿度控制方法,结合送风系统,采用预测 控制的方法实现对lng薄膜罐内罐壁面施工过程的送风环境的实时控制, 保证温湿度始终位于要求范围之内,已解决目前的温湿度控制系统所存在 的控制延时的问题。
4.本技术第一方面提供了一种适用于lng薄膜罐内罐壁面施工过程的 送风系统,该送风系统包括储罐、环形送风管及垂直送风管;所述储罐的 内部为空腔结构,所述环形送风管位于所述储罐的内部,且所述环形送风 管架设于预设高度处,所述环形送风管由四段环形水平织物风管组成,每 段所述环形水平织物风管的中间分别设有一静压箱,所述静压箱与所述环 形水平织物风管的空气处理段相连接;所述储罐的内部设有若干根所述垂 直送风管,若干根所述垂直送风管沿周向均匀布置;每根所述垂直送风管 的顶端连接于所述储罐的顶部,每个所述静压箱的两侧还分别与位于其两 侧的所述垂直风管相连接。
5.进一步的,所述储罐的底部设有槽钢支架,所述环形送风管设置于所 述槽钢支架上。
6.进一步的,所述垂直送风管上布置有两排交叉设置的用于送风的微型 小孔。
7.进一步的,位于水平方向上的相邻两个所述微型小孔之间的夹角为90 度,且两个所述微型小孔之间的送风角度为45度。
8.本技术第二方面提供了一种用于送风系统的温湿度控制系统,该系统 包括:室内控制模块,包括温湿度传感器及室内送风机组,所述温湿度传 感器设于所述储罐的内壁面
施工位置,用于采集所述储罐的内壁面施工位 置的温度数据和湿度数据;所述室内送风机组设于储罐的内部,且所述室 内送风机组与每段所述环形水平织物风管的静压箱连接,以向所述静压箱 送风;室外控制模块,包括室外送风机组及与室外送风机组连接的换热机 组,所述室外送风机组设于所述储罐的外部,且所述室外送风机组与每段 所述环形水平织物风管的静压箱连接,以向所述静压箱送风;处理器,用 于接收所述温湿度传感器采集的所述储罐的内壁面施工位置的温度数据 和湿度数据,建立时间序列分析模型,将采集到的所述储罐的内壁面施工 位置的温度数据和湿度数据输入至所述时间序列分析模型,预测下一时刻 的所述储罐的内壁面施工位置的温度值和湿度值,分别判断预测到的下一 时刻的所述储罐的内壁面施工位置的温度值和湿度值与预设值的大小,基 于判断结果,生成控制指令,以控制所述室内送风机组及所述室外送风机 组的加湿段及换热段,以调节所述室内送风机组及所述室外送风机组的送 风温度和湿度。
9.进一步的,所述室内送风机组包括两组,两组所述室内送风机组相对 设置在所述储罐的内部;每组所述室内送风机组分别包括两个间隔设置的 室内空调机组,每个所述室内空调机组分别通过室内送风管道与对应的一 段环形水平织物风管的静压箱连接,用于处理空气,并将处理后的空气送 入所述静压箱。
10.进一步的,所述室外送风机组包括两组,两组所述室外送风机组相对 设置在所述储罐外部的两侧,每组所述室外送风机组分别包括两个间隔设 置的室外空调机组,所述室外空调机组通过室外送风管道与对应的一段环 形水平织物风管的静压箱连接,用于处理空气,并将处理后的空气送入所 述静压箱。
11.进一步的,所述控制指令包括第一湿度调节指令或第二湿度调节指令; 所述处理器判断预测到的下一时刻的所述储罐的内壁面施工位置的湿度 值与预设值的大小,基于判断结果,生成控制指令,包括:设置最小湿度 值和最大湿度值;如果预测到的下一时刻的所述储罐的内壁面施工位置的 湿度值低于所述最小湿度值,生成第一湿度调节指令,所述第一湿度调节 指令用于调节所述室内送风机组及所述室外送风机组的加湿段来提高送 风湿度,以提高所述储罐的内壁面施工位置的湿度的操作;如果预测到的 下一时刻的所述储罐的内壁面施工位置的湿度值高于所述最大湿度值,生 成第二湿度调节指令,所述第二湿度调节指令用于调节所述室内送风机组 及所述室外送风机组的加湿段来降低送风湿度,以降低所述储罐的内壁面 施工位置的湿度的操作。
12.进一步的,所述控制指令包括第一温度调节指令或第二温度调节指令; 所述处理器判断预测到的下一时刻的所述储罐的内壁面施工位置的温度 值与预设值的大小,基于判断结果,生成控制指令,包括:设置最小温度 值和最大温度值;如果预测到的下一时刻的所述储罐的内壁面施工位置的 温度值低于所述最小温度值,生成第一温度调节指令,所述第一湿度调节 指令用于降低所述室内送风机组及所述室外送风机组的换热段风机转速 来提高送风温度,以提高所述储罐的内壁面施工位置的温度的操作;如果 预测到的下一时刻的所述储罐的内壁面施工位置的湿度值高于所述最大 温度值,生成第二温度调节指令,所述第二温度调节指令用于提高所述室 内送风机组及所述室外送风机组的换热段风机转速来降低送风温度,以降 低所述储罐的内壁面施工位置的温度的操作。
13.本技术第三方面提供了一种用于送风系统的温湿度控制方法,该方法 包括:采集所述储罐的内壁面施工位置的温度数据和湿度数据;建立时间 序列分析模型;将采集到的
所述储罐的内壁面施工位置的温度数据和湿度 数据输入至所述时间序列分析模型,预测下一时刻的所述储罐的内壁面施 工位置的温度值和湿度值;分别判断预测到的下一时刻的所述储罐的内壁 面施工位置的温度值和湿度值与预设值的大小,基于判断结果,生成控制 指令,以控制所述室内送风机组及所述室外送风机组的加湿段及换热段, 以调节所述室内送风机组及所述室外送风机组的送风温度及湿度。
14.上述的送风系统、温湿度控制系统及方法,可以控制送风系统实现均 匀送风,还能实现对储罐的内壁面施工位置的温湿度的预测控制,并且能 满足储罐的内壁面施工位置的温湿度控制及舒适度要求。该温湿度控制系 统实现对送风系统的制冷、制热及除湿,且除湿效果好,能够满lng薄 膜罐的内壁面施工位置的温湿度环境的要求。
附图说明
15.为了说明而非限制的目的,现在将根据本发明的优选实施例、特别是 参考附图来描述本发明,其中:
16.图1是本技术第一实施方式提供的适用于lng薄膜罐内罐壁面施工 过程的送风系统的结构示意图;
17.图2是图1中送风系统的风管布置示意图;
18.图3是图1中单垂直送风管的气流示意图;
19.图4是本技术第二实施方式提供的用于送风系统的温湿度控制系统的 结构示意图;
20.图5是本技术第三实施方式提供的用于送风系统的温湿度控制方法的 流程图。
具体实施方式
21.为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附 图和具体实施例对本发明进行详细描述。需要说明的是,在不冲突的情况 下,本发明的实施例及实施例中的特征可以相互组合。
22.在下面的描述中阐述了很多具体细节以便于充分理解本发明,所描述 的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明 中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的 所有其他实施例,都属于本发明保护的范围。
23.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的 技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所 使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。
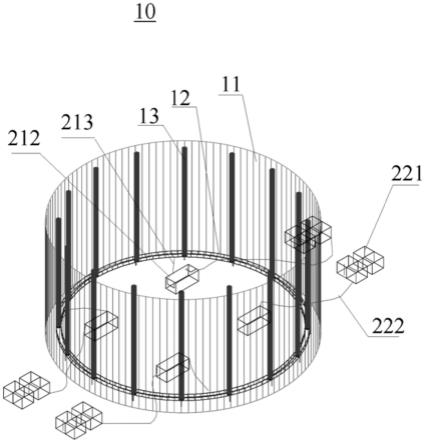
24.图1是本技术第一实施方式提供的适用于lng薄膜罐内罐壁面施工 过程的送风系统10的结构示意图。图2是图1中送风系统10的风管布置 示意图。如图1和图2所示,该送风系统10包括储罐11、环形送风管12 及垂直送风管13。
25.储罐11呈圆柱体结构,且储罐11的内部为空腔结构。环形送风管12 位于储罐11的内部,且环形送风管12架设于预设高度处,环形送风管12 由四段环形水平织物风管121组成,每段环形水平织物风管121的中间分 别设有一静压箱122,静压箱122与环形水平织物风管121的空气处理段 相连接。
26.储罐11的内部沿周向均匀布置有16根垂直送风管13,每根垂直送风 管13的顶端连接于储罐11的顶部,每个静压箱122的两侧还分别与位于 其两侧的两根垂直风管13相连接。
27.在本实施例中,优选地,每段环形水平织物风管的长度为44000mm, 直径为1727mm。
28.在本实施例中,预设高度可为2m。请参阅附图2,储罐11的底部设 有槽钢支架14,环形送风管12设置于槽钢支架14上。
29.在本实施例中,垂直送风管13采用垂直织物送风立管,优选地,垂 直织物送风立管的直径为1473mm,长度为36000mm。垂直送风管13采 用角钢连接于储罐11的顶部。优选地,垂直送风管13通过吊扣15与钢 丝16连接,钢丝16的最顶端固定在角钢上,角钢通过螺栓与储罐15的 顶部连接,钢丝的最下方固定在槽钢支架上。
30.在本实施例中,垂直送风管13上布置有两排交叉设置的用于送风的 微型小孔17。图3是图1中单垂直送风管的气流示意图。请参阅附图3, 位于水平方向上的相邻两个微型小孔17之间的夹角α为90度,两个微型 小孔之间的送风角度β为45度。优选地,微型小孔吹向墙壁处的风速为 0.3m/s,送风距离为4米。微型小孔送风下的送风气流组织最能满足lng 薄膜罐内罐壁面施工过程中壁面温湿度的要求。
31.上述的适用于lng薄膜罐内罐壁面施工过程的送风系统,由环形送 风管14及垂直送风管13组成室内送风系统,实现均匀送风。
32.图4是本技术第二实施方式提供的用于送风系统的温湿度控制系统的 结构示意图。该温湿度控制系统20通过传感器对壁面人员施工位置的温 度和湿度的实时监测,进一步通过预测控制模型对下一时刻的温湿度值进 行预测,实现送风系统的温湿度的自动控制。
33.请参阅图4,该温湿度控制系统20包括室内控制模块21、室外控制 模块22及处理器23。
34.其中,室内控制模块21包括温湿度传感器211及室内送风机组212, 温湿度传感器211设于储罐11的内壁面施工位置,用于采集储罐11的内 壁面施工位置的温度数据和湿度数据。室内送风机组212包括两组,两组 室内送风机组212相对设置在储罐11的内部,如图1所示。每组室内送 风机组212分别包括两个间隔设置的室内空调机组,每个室内空调机组分 别通过室内送风管道213与对应的一段环形水平织物风管的静压箱122连 接,用于处理空气,并将处理后的空气送入静压箱122。
35.其中,室外控制模块22包括室外送风机组221及与室外送风机组221 连接的换热机组222。室外送风机组221包括两组,两组室外送风机组221 相对设置在储罐11外部的两侧,如图1所示。每组室外送风机组221分 别包括两个间隔设置的室外空调机组,室外空调机组通过室外送风管道 222与对应的一段环形水平织物风管的静压箱122连接,用于处理空气, 并将处理后的空气送入静压箱122。换热机组222连接室外送风机组221, 用于与室外送风机组221引入的风流进行换热。
36.其中,处理器23,用于接收温湿度传感器211采集的温度数据和湿度 数据,建立时间序列分析模型,将采集到的温度数据及湿度数据输入至时 间序列分析模型,预测下一时刻的储罐11的内壁面施工位置的温度值和 湿度值,分别判断预测到的下一时刻的储罐11
的内壁面施工位置的温度 值和湿度值与预设值的大小,基于判断结果,生成控制指令,以控制室内 送风机组212及室外送风机组221的加湿段及换热段,以调节室内送风机 组212及室外送风机组221的送风温度及湿度。
37.在本实施例中,温湿度传感器211包括安装于储罐11的内壁面施工 处的干球温度传感器、湿球温度传感器及相对湿度传感器,通过干球温度 传感器、湿球温度传感器及相对湿度传感器实时监测储罐11的内壁面施 工位置的温度数据及湿度数据。
38.在本实施例中,时间序列分析模型为arima模型。单积分自回归滑 动平均模型(arima(p,d,q))是时间序列分析模型中的一种,是基于自 回归移动平均模型(arma(p,q))的改进,对非平稳时间序列进行d阶 差分,实现时间序列平稳化转变,其模型形式如下式所示:
[0039][0040]
其中,γ为滞后系数,ai为p阶的自回归系数,bj为q阶移动平均系数, d为差分阶数,ε
t
为随机误差项。
[0041]
以时间序列分析模型为arima模型为例,处理器23建立arima模 型的步骤包括:
[0042]
(1)检验时间序列平稳性与平稳化变换:采用adf单位根检验法来 检验序列是否存在单位根,从而来判断序列是否平稳。
[0043]
假设序列服从具有单位根的p阶自回归过程,运用普通最小二乘法回 归模型进行检验,检验模型形式如下式所示:
[0044][0045]
若a1=0,统计量服从标准正态分布,则假设成立,该序列是非平稳的; 若|a1|<0,统计量发生退化,该序列不存在单位根,是平稳的。利用matlab 软件的adftest函数对时间序列进行检验,得到该序列统计值在10%的显 著水平上无法拒绝原假设,即该序列是非平稳时间序列;利用r软件对时 间序列进行一阶差分,进行差分后adf检验在1%的显著水平下小于标准 值,因此拒绝原假设,完成了时间序列平稳化转换。
[0046]
(2)arima模型定阶:计算序列的自相关函数acf和偏自相关函 数pacf,通过判断函数是否呈现拖尾规律来确定模型的阶数。
[0047]
自相关函数acf反映了序列总体相关性,对于p阶自回归模型,其 自相关函数如下式所示:
[0048]
ρk=a1ρ
k-1
+a2ρ
k-2
+
…ap
ρ
k-p
ꢀꢀ
(3)
[0049]
自相关函数由ρk由1-p阶滞后自相关函数所决定,呈现拖尾变化规律; 偏自相关函数pacf反映了滞后变量间的相关关系,其函数表达式如下式 所示:
[0050][0051]
偏自相关系数由自相关系数所决定;通过函数图进行判断,如果自相 关函数和偏自相关函数都是拖尾的,且在某一滞后项后开始逐渐趋向于零, 则该随机序列可采用arima(p,d,q),但是在计算中采用从最低阶开 始拟合模型,每增加一个参数并观察拟合结果变化。
[0052]
(3)最优参数选取:通过aic准则来检验模型的显著性和拟合优度, 根据不同的阶数组合分别计算aic值,其中aic值最小的为最优模型。
[0053]
如上个步骤所述,在模型阶数确定过程中,往往存在多组(p,q)参 数值能满足模型要求,因此采用赤池信息准则(aic准则)来检验模型合 理性,通过计算aic值来检验模型显著性和拟合优度,计算公式如下式所 示:
[0054]
aic=2k-2ln(l)
ꢀꢀ
(5)
[0055]
式中,k为模型参数个数,l是似然函数。模型拟合过程中,sarima ()函数会生成aic值,aic值最小的即为最优模型,根据拟合结果最终 确定为arima(1,1,1)模型。
[0056]
(4)模型合理性检验:通过计算模型的残差来检验模型的合理性, 采用正态q-q图检验法检验模型残差是否满足正态性假设。
[0057]
为进一步反映模型拟合情况以及样本数据与实际值之间的差异,通过 计算模型的残差来检验模型的合理性,若理性模型的残差满足均值为零的 正态分布,则说明该模型适用于此随机序列,通过采用正态q-q图检验法 检验模型残差是否满足正态性假设。
[0058]
处理器22建立时间序列分析模型(arima模型)后,将测得的上一 时刻的储罐11的内壁面施工处的温度数据和湿度数据,输入至时间序列 分析模型中进行训练并预测,得到下一时刻的储罐11的内壁面施工位置 的温度值和湿度值。
[0059]
在本实施例中,所述控制指令包括第一湿度调节指令或第二湿度调节 指令。处理器23判断预测到的下一时刻的储罐11的内壁面施工位置的湿 度值与预设值的大小,基于判断结果,生成控制指令,包括:
[0060]
根据人员舒适度区间和施工湿度要求,设置湿度阈值,包括最小湿度 值和最大湿度值,即最小湿度值为30%;最大湿度值为60%;
[0061]
如果预测到的下一时刻的储罐11的内壁面施工位置的湿度值低于预 设的最小湿度值30%,生成第一湿度调节指令,所述第一湿度调节指令用 于调节室内送风机组212及室外送风机组221的加湿段来提高送风湿度, 以提高储罐15的内壁面施工位置的湿度的操作;
[0062]
如果预测到的下一时刻的储罐11的内壁面施工位置的湿度值高于预 设的最大湿度值60%,生成第二湿度调节指令,所述第一湿度调节指令用 于调节室内送风机组212及室外送风机组221的加湿段来降低送风湿度, 以降低储罐15的内壁面施工位置的湿度的操作。
[0063]
在本实施例中,所述控制指令包括第一温度调节指令或第二温度调节 指令。处理器22判断预测到的下一时刻的储罐11的内壁面施工位置的温 度值与预设值的大小,基于判断结果,生成控制指令,包括:
[0064]
按照人员舒适度区间和施工温度要求,设置最低温度值t
min
和最高温 度值t
max
;
[0065]
如果预测到的下一时刻的储罐11的内壁面施工位置的温度值低于最 低温度值t
min
,生成第一温度调节指令,所述第一温度调节指令用于降低 室内送风机组212及室外送风机组221的换热段风机转速来提高送风温度, 以提高储罐15的内壁面施工位置的温度的操作;或
[0066]
如果预测到的下一时刻的储罐11的内壁面施工位置的温度值高于最 高温度值t
max
,生成第二温度调节指令,所述第二温度调节指令用于提高 室内送风机组212及室外送
风机组221的换热段风机转速来降低送风温度, 以降低储罐15的内壁面施工位置的温度的操作。
[0067]
在本实施例中,最低温度值t
min
为24℃,最高温度值t
max
为26℃。当 预测到的下一时刻的储罐11的内壁面施工位置的温度值低于最低温度值 24℃,通过降低室内送风机组212和室外送分机组221的换热段风机转速, 来提高室内送风机组和室外送分机组的送风温度;当预测到的下一时刻的 储罐15的内壁面施工位置的温度值高于最高温度值26℃,通过提高室内 送风机组和室外送分机组的换热段风机转速,来降低送风机组和室外送分 机组的送风温度。
[0068]
上述的温湿度控制系统,基于时间序列arima模型,通过安装于储 罐的内壁面施工位置的温湿度传感器实时监测施工位置的温度和湿度,通 过时间序列arima模型来预测下一时刻的施工位置的温度值及湿度值, 能够对室内送风机组和室外送分机组进行自动控制,从而控制送风的湿度 及温度。
[0069]
上述的温湿度控制系统,可以控制送风系统实现均匀送风,还能实现 对储罐的内壁面施工位置的温湿度的预测控制,并且能满足储罐的内壁面 施工位置的温湿度控制及舒适度要求。该温湿度控制系统实现对送风系统 的制冷、制热及除湿,且除湿效果好,能够满lng薄膜罐的内壁面施工 位置的温湿度环境的要求。
[0070]
上述的温湿度控制系统,实现对室内送风机组和室外送分机组的实时 控制,保证储罐的内壁面施工位置的温湿度始终位于要求范围之内,已解 决目前的温湿度控制系统所存在的控制延时的问题。
[0071]
图5是本技术第三实施方式提供的用于送风系统的温湿度控制方法的 流程图。请参阅图5,该温湿度控制方法包括以下步骤:
[0072]
s1,采集储罐的内壁面施工位置的温度数据和湿度数据。
[0073]
在本实施例中,通过温湿度传感器211采集储罐11的内壁面施工位 置的温度数据和湿度数据。
[0074]
s2,建立时间序列分析模型。
[0075]
在本实施例中,时间序列分析模型为arima模型。单积分自回归滑 动平均模型(arima(p,d,q))是时间序列分析模型中的一种,是基于自 回归移动平均模型(arma(p,q))的改进,对非平稳时间序列进行d阶 差分,实现时间序列平稳化转变,其模型形式如下式所示:
[0076][0077]
其中,γ为滞后系数,ai为p阶的自回归系数,bj为q阶移动平均系数, d为差分阶数,ε
t
为随机误差项。
[0078]
以时间序列分析模型为arima模型为例,建立arima模型的步骤 包括:
[0079]
(1)检验时间序列平稳性与平稳化变换:采用adf单位根检验法来 检验序列是否存在单位根,从而来判断序列是否平稳。
[0080]
假设序列服从具有单位根的p阶自回归过程,运用普通最小二乘法回 归模型进行检验,检验模型形式如下式所示:
[0081][0082]
若a1=0,统计量服从标准正态分布,则假设成立,该序列是非平稳的; 若|a1|<0,统计量发生退化,该序列不存在单位根,是平稳的。利用matlab 软件的adftest函数对时间序列进行检验,得到该序列统计值在10%的显 著水平上无法拒绝原假设,即该序列是非平稳时间序列;利用r软件对时 间序列进行一阶差分,进行差分后adf检验在1%的显著水平下小于标准 值,因此拒绝原假设,完成了时间序列平稳化转换。
[0083]
(2)arima模型定阶:计算序列的自相关函数acf和偏自相关函 数pacf,通过判断函数是否呈现拖尾规律来确定模型的阶数。
[0084]
自相关函数acf反映了序列总体相关性,对于p阶自回归模型,其 自相关函数如下式所示:
[0085]
ρk=a1ρ
k-1
+a2ρ
k-2
+
…ap
ρ
k-p
ꢀꢀ
(3)
[0086]
自相关函数由ρk由1-p阶滞后自相关函数所决定,呈现拖尾变化规律; 偏自相关函数pacf反映了滞后变量间的相关关系,其函数表达式如下式 所示:
[0087][0088]
偏自相关系数由自相关系数所决定;通过函数图进行判断,如果自相 关函数和偏自相关函数都是拖尾的,且在某一滞后项后开始逐渐趋向于零, 则该随机序列可采用arima(p,d,q),但是在计算中采用从最低阶开 始拟合模型,每增加一个参数并观察拟合结果变化。
[0089]
(3)最优参数选取:通过aic准则来检验模型的显著性和拟合优度, 根据不同的阶数组合分别计算aic值,其中aic值最小的为最优模型。
[0090]
如上个步骤所述,在模型阶数确定过程中,往往存在多组(p,q)参 数值能满足模型要求,因此采用赤池信息准则(aic准则)来检验模型合 理性,通过计算aic值来检验模型显著性和拟合优度,计算公式如下式所 示:
[0091]
aic=2k-2ln(l)
ꢀꢀ
(5)
[0092]
式中,k为模型参数个数,l是似然函数。模型拟合过程中,sarima ()函数会生成aic值,aic值最小的即为最优模型,根据拟合结果最终 确定为arima(1,1,1)模型。
[0093]
(4)模型合理性检验:通过计算模型的残差来检验模型的合理性, 采用正态q-q图检验法检验模型残差是否满足正态性假设。
[0094]
为进一步反映模型拟合情况以及样本数据与实际值之间的差异,通过 计算模型的残差来检验模型的合理性,若理性模型的残差满足均值为零的 正态分布,则说明该模型适用于此随机序列,通过采用正态q-q图检验法 检验模型残差是否满足正态性假设。
[0095]
s3,将采集到的温度数据及湿度数据输入至时间序列分析模型,预测 下一时刻的储罐的内壁面施工位置的温度值和湿度值。
[0096]
建立时间序列分析模型(arima模型)后,将测得的上一时刻的内 壁面施工处的温度数据和湿度数据,输入至时间序列分析模型中进行训练 并预测,得到下一时刻的内壁面施工位置的温度值和湿度值。
[0097]
s4,分别判断预测到的下一时刻的储罐的内壁面施工位置的温度值和 湿度值与
预设值的大小,基于判断结果,生成控制指令,以控制室内送风 机组及室外送风机组的加湿段及换热段,以调节室内送风机组及室外送风 机组的送风温度及湿度。
[0098]
在本实施例中,所述控制指令包括第一湿度调节指令或第二湿度调节 指令。判断预测到的下一时刻的储罐的内壁面施工位置的湿度值与预设值 的大小,基于判断结果,生成控制指令,包括:
[0099]
根据人员舒适度区间和施工湿度要求,设置湿度阈值,即最小湿度值 为30%;最大湿度值为60%;
[0100]
如果预测到的下一时刻的储罐11的内壁面施工位置的湿度值低于预 设的最小湿度值30%,生成第一湿度调节指令,所述第一湿度调节指令用 于调节室内送风机组212及室外送风机组221的加湿段来提高送风湿度, 以提高储罐15的内壁面施工位置的湿度的操作;或
[0101]
如果预测到的下一时刻的储罐11的内壁面施工位置的湿度值高于预 设的最大湿度值60%,生成第一湿度调节指令,所述第一湿度调节指令用 于调节室内送风机组212及室外送风机组221的加湿段来降低送风湿度, 以降低储罐15的内壁面施工位置的湿度的操作。
[0102]
在本实施例中,所述控制指令包括第一温度调节指令或第二温度调节 指令。处理器22判断预测到的下一时刻的储罐11的内壁面施工位置的温 度值与预设值的大小,基于判断结果,生成控制指令,包括:
[0103]
按照人员舒适度区间和施工温度要求,设置最低温度值t
min
和最高温 度值t
max
;
[0104]
如果预测到的下一时刻的储罐15的内壁面施工位置的温度值低于最 低温度值t
min
,生成第一湿度调节指令,所述第一湿度调节指令用于降低 室内送风机组212及室外送风机组221的换热段风机转速来提高送风温度, 以提高储罐15的内壁面施工位置的温度的操作;或
[0105]
如果预测到的下一时刻的储罐15的内壁面施工位置的温度值高于最 高温度值t
max
,生成第一湿度调节指令,所述第一湿度调节指令用于提高 室内送风机组212及室外送风机组221的换热段风机转速来降低送风温度, 以降低储罐15的内壁面施工位置的温度的操作。
[0106]
在本实施例中,最低温度值t
min
为24℃,最高温度值t
max
为26℃。当 预测到的下一时刻的储罐11的内壁面施工位置的温度值低于最低温度值 24℃,通过降低室内送风机组212和室外送分机组221的换热段风机转速, 来提高内送风机组和室外送分机组的送风温度;当预测到的下一时刻的储 罐15的内壁面施工位置的温度值高于最高温度值26℃,通过提高室内送 风机组和室外送分机组的换热段风机转速,来降低送风机组和室外送分机 组的送风温度。
[0107]
上述的温湿度控制方法,基于时间序列arima模型,通过安装于储 罐的内壁面施工位置的温湿度传感器实时监测施工位置的温度和湿度,通 过时间序列arima模型来预测下一时刻的施工位置的温度值及湿度值, 能够对室内送风机组和室外送分机组进行自动控制,从而控制送风的湿度 及温度。
[0108]
上述具体实施方式,并不构成对本发明保护范围的限制。本领域技术 人员应该明白的是,取决于设计要求和其他因素,可以发生各种各样的修 改、组合、子组合和替代。任
何在本发明的精神和原则之内所作的修改、 等同替换和改进等,均应包含在本发明保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1