模块化多功能机器人无人控制系统的制作方法
1.本实用新型属于机器人控制系统技术领域,具体涉及一种模块化多功能机器人无人控制系统。
背景技术:
2.目前的各类无人机、机器人、无人车辆等设备的控制系统都是以x86架构的进口处理器作为控制系统的处理器与地面站系统,在军事领域中采用进口处理器作为我国的设备控制系统是存在巨大的信息安全隐患的,并且x86架构的计算机系统在生产中造价要比arm架构计算机系统的造价要高许多。
3.目前的各类无人机、机器人、无人车辆等设备的控制系统的操作系统大多数都是以windows系统,因此在军用及各种应用领域都是存在巨大的信息安全隐患的,在伊拉克战争中,美国微软公司就采用技术手段将伊拉克采用windows的军用电脑打开后,将伊拉克的军用电脑里的军事机密盗取,因此在国防涉密的行业领域作业中使用windows系统是极其不安全的。因此有必要提出改进。
技术实现要素:
4.本实用新型解决的技术问题:提供一种模块化多功能机器人无人控制系统,本实用新型是一套由国产arm架构处理器为控制系统的主控处理器,以linux操作系统作为本控制系统的操作系统,因此硬件、操作系统及应用程序都是国产研发,信息安全可以实现更高的安全系数,并且制作成本低、可靠性高,抗干扰能力强,具有更强的用户扩展空间。
5.本实用新型采用的技术方案:模块化多功能机器人无人控制系统,包括机载控制系统和地面站控制系统,所述机载控制系统包括机载机器人执行系统主板、机载通信控制主板、机载智能决策主板组、机载外围设备,所述地面站控制系统包括地面站通信控制主板、地面站主板、地面站遥控操作盘、地面站外围设备;
6.所述机载机器人执行系统主板是由主处理器mcu与副处理器mcu协同工作,主处理器mcu与副处理器mcu之间通过串口通信;
7.所述机载通信控制主板通过串口与can通信将指令下发给机载机器人执行系统主板,所述主处理器mcu与副处理器mcu同时接收机载通信控制主板的指令,所述主处理器mcu做指令处理工作,所述副处理器mcu做实时监控工作,所述副处理器mcu在主处理器mcu出现故障后立即替代主处理器mcu的工作,并向机载通信控制主板上报故障代码;
8.所述机载智能决策主板组为多片arm架构的rk3399型处理器核心板,所述arm架构的rk3399处理器核心板之间是通过千兆网插在一个微型千兆交换机上进行数据交互;
9.所述机载通信控制主板接收433mhz/900mhz通信模块的控制指令数据并进行校验处理,所述机载通信控制主板处理后的数据通过千兆网发给机载智能决策主板组进行人工智能控制指令分析并将处理指令返回给机载通信控制主板,所述机载通信控制主板再将机载智能决策主板组处理后的指令信息通过can总线下发给机载机器人执行系统主板的主处
理器mcu与副处理器mcu进行受控设备的运动控制工作;
10.所述机载通信控制主板接收到机载智能决策主板组的自动控制指令后通过can总线读取毫米波雷达与激光雷达传感器的环境感知数据信息并将读取到的毫米波雷达与激光雷达数据备份后通过千兆网通信发给机载智能决策主板组的arm架构的rk3399型处理器核心板1号板卡,所述机载通信控制主板将备份的雷达数据进行粗处理后立即对外围环境的障碍物进行紧急规避;
11.地面站通信控制主板通过433mhz/900mhz通信模块给机载控制系统的433mhz/900mhz无线电台发送控制数据,通过2.4ghz通信模块接收机载控制系统2.4ghz通信模块的视频数据后再通过交换机发给地面站主板;
12.地面站通信控制主板采集地面站遥控操作盘的实时数据并上传给地面站主板所述地面站主板将遥控数据进行智能处理后通过433mhz/900mhz通信模块发给机载控制系统,并对机载控制系统的视频数据进行智能算法处理与显示。
13.进一步的,所述主处理器mcu通过gpio引脚控制多路mos开关管控制组,并将多路mos开关管控制组的工作状态实时反馈给副处理器mcu进行监控;
14.所述主处理器mcu使用mcu内部pwm信号驱动通过gpio引脚控制5v驱动电路实现5v电压的pwm信号输出,给外界受控对象提供5v的pwm信号控制,同时将输出的pwm反馈给副处理器mcu进行实时监控;
15.所述主处理器mcu通过gpio引脚进行外部受控对象的adc模拟信号采集与高低3.3v数字电平信号采集,并且同时输入给副处理器mcu,副处理器mcu进行实时监控;
16.所述主处理器mcu通过gpio引脚控制多路继电器控制组而实现用处理器mcu驱动继电器通断来控制外部受控对象的电路通断,所述主处理器mcu同时将继电器通断的状态信号反馈给副处理器mcu进行实时监控。
17.进一步的,所述机载通信控制主板预留通过gpio通道采集3.3v数字信号功能、通过gpio通道采集adc模拟信号、通过gpio通道输出5v高低数字信号与5v的pwm数字信号;所述机载通信控制主板通过i2c总线采集9轴陀螺仪姿态信号;所述机载通信控制主板通过串口读取北斗/gps定位系统模块的位置信息;所述机载通信控制主板通过千兆网接收机载智能决策主板组的arm架构的rk3399处理器1号板卡的数据与指令,并同时通过千兆网将机载通信控制主板的信息数据发送给arm架构的rk3399处理器1号板卡;
18.所述机载通信控制主板通过串口读取433mhz/900mhz通信模块的远程数传电台控制数据指令,并对433mhz/900mhz通信模块电数据进行实时校验;
19.所述机载通信控制主板通过spi总线与2.4ghz通信模块收发数据实现2mb/s带宽的数据通信,所述arm架构的rk3399型处理器核心板将采集到高清网络摄像头的视频数据进行智能处理并通过2.4ghz通信模块发给地面站的2.4ghz通信模块,实现智能视频处理并图像传回的功能。
20.进一步的,所述arm架构的rk3399型处理器核心板1号板卡是进行整个系统的数据读取、输出与信号处理,并且挂接一块固态硬盘、一个5g通信模块、wifi模块,并预留usb、hdmi外接接口;其他的arm架构的rk3399型处理器核心板n号板卡是根据系统的人工智能算法的算力需求而进行扩展。
21.进一步的,所述地面站主板通过键盘与鼠标接收用户的指令。
22.本实用新型与现有技术相比的优点:
23.1、本方案优点是采用国产arm架构处理器为控制系统的主控处理器,以linux操作系统作为本控制系统的操作系统,从硬件、操作系统及应用程序都是国产研发,因此信息安全可以实现更高的安全系数;
24.2、本方案中所有处理器芯片是采用arm架构的国产芯片,arm架构处理器及主板在生产中成本较低,因此从成本与可靠性角度而言,成本更低,可靠性更高;
25.3、本方案的控制系统布局设计,在硬件电路原理设计时采用双处理器协同工作,一个处理器做主处理,另一个处理器做监控副处理器,当工作中的主处理器一旦发生故障,则监控副处理器立马停止主处理器工作并接替主处理器的所有工作,同时报警,从而实现更加可靠的系统控制策略,保护受控设备的运行与作业安全以免因为故障而发生灾难;
26.4、相比市场上其他控制系统而言,本方案的通信技术采用更先进的数据传输压缩技术,通信带宽占用率低,用低频段低带宽无线电台传输重要大量数据,多信道自动切换,因此抗干扰能力更强;
27.5、本方案采用多波段信道无线通信方式,并且5g蜂窝通信技术只是备用信道,在实际应用生产与作业中,所有通信是不需要使用运营商的网络的,因此本系统的所有通信是零成本,比目前市场上太多控制系统采用5g蜂窝通信的方式在实际应用中的使用成本更低;
28.6、相比市场上人工控制的控制系统而言,本方案智能化水平更高,可以人机结合半自动控制,也可以采用ai智能技术实现全自助控制机器人、特种车辆与无人机的运动作业,适用范围广;
29.7、相比市场上的常规控制系统,本方案可以实现相同价格的基础上可以多扩展国产处理的数量,在算力上实现不断提高以满足更强大的ai算法处理需求,具有更强的用户扩展空间,可以根据用户的需求而扩展新的功能。
附图说明
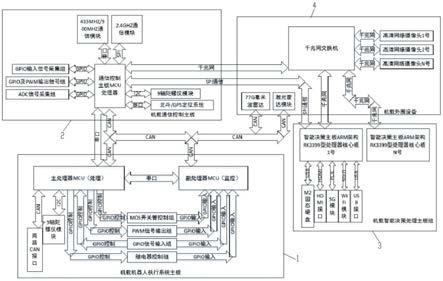
30.图1为本实用新型中的机载控制系统的原理框图;
31.图2为本实用新型中的地面站控制系统的原理框图。
具体实施方式
32.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
33.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下。由语句“包括一个......”限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
34.请参阅图1
‑
2,详述本实用新型的实施例。
35.模块化多功能机器人无人控制系统,包括机载控制系统和地面站控制系统,所述机载控制系统包括机载机器人执行系统主板1、机载通信控制主板2、机载智能决策主板组3、机载外围设备4,所述地面站控制系统包括地面站通信控制主板5、地面站主板6、地面站遥控操作盘7、地面站外围设备8;
36.1、机载机器人执行系统主板1:
37.所述机载机器人执行系统主板1是由主处理器mcu与副处理器mcu协同工作,主处理器mcu与副处理器mcu之间通过串口通信;
38.所述主处理器mcu通过gpio引脚控制多路mos开关管控制组,实现用处理器mcu驱动mos管实现对外界受控对象的12v~24v电压电路高频通断控制,并将多路mos开关管控制组的工作状态实时反馈给副处理器mcu进行监控,若主处理器有故障,则副处理器可替代主处理器进行工作;
39.所述主处理器mcu使用mcu内部pwm信号驱动通过gpio引脚控制5v驱动电路实现5v电压的pwm信号输出,给外界受控对象提供5v的pwm信号控制,同时将输出的pwm反馈给副处理器mcu进行实时监控,当副处理器发现故障后立马停止主处理器工作并代替主处理器mcu器工作;
40.所述主处理器mcu通过gpio引脚进行外部受控对象的adc模拟信号采集与高低3.3v数字电平信号采集,并且同时输入给副处理器mcu,副处理器mcu进行实时监控,若主处理器采集信号出现故障则立即替代主控工作;
41.所述主处理器mcu通过gpio引脚控制多路继电器控制组而实现用处理器mcu驱动继电器通断来控制外部受控对象的电路通断,所述主处理器mcu同时将继电器通断的状态信号反馈给副处理器mcu进行实时监控,若主处理器故障则副处理器即刻替代主处理器工作。
42.所述机载通信控制主板2通过串口与can通信将指令下发给机载机器人执行系统主板1后,主处理器mcu与副处理器mcu同时接收机载通信控制主板2的指令后,主处理器mcu做指令处理工作,副处理器mcu做实时监控工作,所述副处理器mcu在主处理器mcu出现故障后立即替代主处理器mcu的工作,并向机载通信控制主板2上报故障代码。
43.本执行系统主板具有极高可靠性的优势,可以控制成本昂贵的设备,实现设备的稳定可靠工作。
44.2、机载通信控制主板2:
45.所述机载通信控制主板2预留通过gpio通道采集3.3v数字信号功能、通过gpio通道采集adc模拟信号、通过gpio通道输出5v高低数字信号与5v的pwm数字信号;所述机载通信控制主板2通过i2c总线采集9轴陀螺仪姿态信号;所述机载通信控制主板2通过串口读取北斗/gps定位系统模块的位置信息;所述机载通信控制主板2通过千兆网接收机载智能决策主板组3的arm架构的rk3399处理器1号板卡的数据与指令,并同时通过千兆网将机载通信控制主板2的信息数据发送给arm架构的rk3399处理器1号板卡;
46.所述机载通信控制主板2通过串口读取433mhz/900mhz通信模块的远程数传电台控制数据指令,并通过先进的算法对433mhz/900mhz通信模块电数据进行实时校验,当发现控制数据通信故障时,立即切换900mhz等其他备用波段的电台进行控制通信数据通信;
47.所述机载通信控制主板2通过spi总线与2.4ghz通信模块收发数据实现2mb/s带宽
的数据通信,所述arm架构的rk3399型处理器核心板将采集到高清网络摄像头的视频数据进行智能处理并通过2.4ghz通信模块发给地面站的2.4ghz通信模块,实现智能视频处理并图像传回的功能。
48.所述机载通信控制主板2接收433mhz/900mhz通信模块的控制指令数据并进行校验处理,所述机载通信控制主板2处理后的数据通过千兆网发给机载智能决策主板组3进行人工智能控制指令分析并将处理指令返回给机载通信控制主板2,所述机载通信控制主板2再将机载智能决策主板组3处理后的指令信息通过can总线下发给机载机器人执行系统主板1的主处理器mcu与副处理器mcu进行受控设备的运动等控制工作;
49.所述机载通信控制主板2接收到机载智能决策主板组3的自动控制指令后通过can总线读取毫米波雷达与激光雷达传感器的环境感知数据信息并将读取到的毫米波雷达与激光雷达数据备份后通过千兆网通信发给机载智能决策主板组3的arm架构的rk3399型处理器核心板1号板卡,所述机载通信控制主板2将备份的雷达数据进行粗处理后立即对外围环境的障碍物进行紧急规避。
50.3、机载智能决策主板组3:
51.所述机载智能决策主板组3为多片国产的arm架构的rk3399型处理器核心板,有自己特定的功能与千兆网口,所述arm架构的rk3399处理器核心板之间是通过千兆网插在一个微型千兆交换机上进行数据交互;
52.所述arm架构的rk3399型处理器核心板1号板卡是进行整个系统的数据读取、输出与信号处理,并且挂接一块固态硬盘、一个5g通信模块、wifi模块,并预留usb、hdmi外接接口,进行与用户进行升级维护等工作使用;
53.其他的arm架构的rk3399型处理器核心板n号板卡是根据系统的人工智能算法的算力需求而进行扩展。
54.4、地面站通信控制主板5:
55.地面站通信控制主板5通过433mhz/900mhz通信模块给机载控制系统的433mhz/900mhz无线电台发送控制数据,通过2.4ghz通信模块接收机载控制系统2.4ghz通信模块的视频数据后再通过交换机发给地面站主板6;
56.地面站通信控制主板5采集地面站遥控操作盘7的实时数据并上传给地面站主板6,所述地面站主板6将遥控数据进行智能处理后通过433mhz/900mhz通信模块发给机载控制系统,并对机载控制系统的视频数据进行智能算法处理与显示。
57.5、地面站主板6:
58.地面站主板6对机载控制系统的视频数据进行智能算法处理与显示,同时将遥控数据进行智能处理后发给机载控制系统。
59.所述地面站主板6通过键盘与鼠标接收用户的指令。
60.本实用新型是一套由国产arm架构处理器为控制系统的主控处理器,以linux操作系统作为本控制系统的操作系统,从硬件、操作系统及应用程序都是国产研发,因此信息安全可以实现更高的安全系数,并且制作成本低、可靠性高,抗干扰能力强,具有更强的用户扩展空间。本实用新型可以应用于各类移动机器人与特种车辆的控制领域;可以取代现有的采用进口处理器与windows操作系统或其他操作系统的机器人或无人机控制系统;可以更加智能的控制移动机器人、特种车辆与无人机,具有人机结合操作与全自动控制等更加
智能的功能。
61.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
62.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1