一种基于DSP和CPLD的引风机信号采集系统的制作方法
一种基于dsp和cpld的引风机信号采集系统
技术领域
1.本实用新型火电厂风机领域,尤其是涉及一种基于dsp和cpld的引风机信号采集系统。
背景技术:
2.引风机是火电厂重要的辅机设备,其运行状态直接影响电力生产的经济性和安全性。引风机一旦出现故障就会造成机组负荷降低或者非计划停机,从而减少机组发电量,增加电厂的维修费用。更严重的是由于引风机在现场运行环境恶劣,故障率较高,易引发潜在安全事故,给火电厂造成巨大的经济损失。
3.为防止出现重大事故,必须对风电机组进行实时状态评估、故障分析、健康诊断和预警等动作。而实时、精确的获取风电机组数据运行数据是开展风电机组运维指标、状态评估、故障分析、健康诊断与预警等工作的基础。这就要求引风机必须有较为齐全且可靠的振动信号采集和分析系统,如果振动信号采集分析不全或者不可靠,运行人员就不能监测机组的运行情况,更无法判断机组的安全性。
4.目前,我国对火电厂风机的状态监测与故障诊断技术研究尚处于起步阶段,自行研制开发的高质量引风机监测系统装置较少,且此类装置多采用单片机,系统多采用96系列单片机等控制型器件,但随着电力系统对实时性、数据量和计算要求的不断提高,这些器件在计算能力方面已不能很好的适应工业监测的要求,致使机械工业的高精度测量、实时监控和先进算法的应用受到限制。
技术实现要素:
5.本实用新型的目的在于克服上述现有技术存在的缺陷而提供一种基于dsp和cpld的引风机信号采集系统,该实用新型可以快速、准确、可靠地采集引风机中的各种振动信号。
6.本实用新型的目的可以通过以下技术方案来实现:
7.本实用新型提供一种基于dsp和cpld的引风机信号采集系统,用于引风机振动信号的采集,包括依次连接的传感器模块、信号处理模块、数字信号处理模块、通信接口模块和上位机,所述数字信号处理模块还分别与数据存储器模块和cpld连接,所述cpld分别与数据存储器模块和信号处理模块连接。
8.优选地,所述信号处理模块包括依次连接的信号调理单元、多路复用器和ad转换器,所述多路复用器和所述ad转换器分别与cpld连接。
9.优选地,所述信号调理单元包括依次连接的交流信号耦合器、增益放大器和低通滤波器,所述交流信号耦合器与传感器模块连接,所述低通滤波器与多路复用器连接。
10.优选地,所述多路复用器与cpld通信连接,所述cpld与ad转换器单向连接。
11.优选地,所述ad转换器采用ad7863芯片。
12.优选地,所述数字信号处理模块包括数据存储单元、通信接口单元和中断管理单
元,所述数据存储单元与数据存储器模块通信连接,所述通信接口单元和通信接口模块通信连接,所述中断管理单元与cpld单向连接。
13.优选地,所述数据存储器模块的片选端通过cpld与中断管理单元建立连接。
14.优选地,所述数字信号处理模块采用tms320vc5402芯片。
15.优选地,所述cpld的芯片采用em1270zt144c5型号的芯片。
16.优选地,所述传感器模块包括电涡流传感器和霍尔转速传感器。
17.与现有技术相比,本实用新型具有如下有益效果:
18.1、本实用新型通过建立数字信号处理模块和cpld之间的连接,使得数字信号处理模块产生的中断信号可以和cpld各种逻辑功能配合,从而准确有效的对多路复用器、ad转换器和数据存储器模块进行片选,并且控制数据的传输方向和读写,提高了引风机信号采集系统的准确性和灵活性。
19.2、本实用新型通过建立cpld和多路复用器之间的通信连接,使得系统可以按照需求对某个信号进行精准采集,从而减少ad转换器的数量,也可以减少数据存储器模块的容量使用,大大降低系统成本。
20.3、本实用新型采用tms320vc5402芯片作为数字信号处理模块,利用其自身所具有的高速处理数据和同时执行多条指令的特性,加快引风机采集系统的运算速度。
21.4、本实用新型采用em1270zt144c5型号的芯片作为cpld,利用其连续式布线结构,精确完成各种算法和组合逻辑,增加引风机采集系统采集数据的准确性。
22.5、本实用新型采用ad7863芯片作为ad转换器,利用其转换精度较高这一特性,避免由于ad转换过程中的失真导致引风机采集系统获取信号的不准确。
附图说明
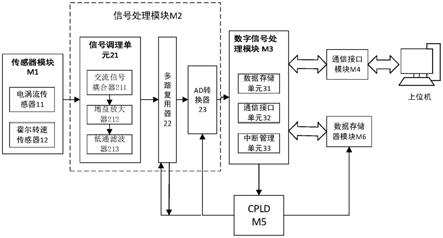
23.图1为本实用新型的结构示意图;
24.图中标记为:m1、传感器模块,m2、信号处理模块,21、信号调理单元,22、多路复用器,23、ad转换器,m3、数字信号处理模块,m4、通信接口模块,m5、cpld,m6、数据存储器模块,11、电涡流传感器,12、霍尔转速传感器,211、交流信号耦合器,212、增益放大器,213、低通滤波器,31、数据存储单元,32、通信接口单元和33、中断管理单元。
具体实施方式
25.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本实用新型实施例的组件可以以各种不同的配置来布置和设计。
26.参考图1所示,本实施例提供一种基于dsp和cpld的引风机信号采集系统,包括:传感器模块m1、信号处理模块m2、信号调理单元21、多路复用器22、ad转换器23、数字信号处理模块m3、通信接口模块m4、cpld m5、数据存储器模块m6、电涡流传感器11、霍尔转速传感器12、交流信号耦合器211、增益放大器212、低通滤波器213、数据存储单元31、通信接口单元32和中断管理单元33。
27.传感器模块m1、信号处理模块m2、数字信号处理模块m3、通信接口模块m4和上位机
依次连接,传感器模块m1包括电涡流传感器11和霍尔转速传感器12,信号处理模块m2包括依次连接的信号调理单元21、多路复用器22和ad转换器23。信号调理单元21包括依次连接的交流信号耦合器211、增益放大器212和低通滤波器213,交流信号耦合器211与传感器模块m1连接,低通滤波器213与多路复用器22连接,数字信号处理模块m3包括数据存储单元31、通信接口单元32和中断管理单元33,数据存储单元31与数据存储器模块m6通信连接,通信接口单元32和通信接口模块m4通信连接,中断管理单元33与cpld m5单向连接;cpld m5与多路复用器22通信连接,还与ad转换器23和数据存储器模块m6单向连接。
28.传感器模块m1:用于测量振动信号,并将振动信号转换为模拟电信号。传感器模块m1包括电涡流传感器11和霍尔转速传感器12,其中电涡流传感器11用于对引风机各轴承的振动幅值进行测量,将各个振动幅值信号转换为电压信号,采用hz-891xl型号;霍尔转速传感器12用于通过霍尔原理准确测量引风机的转速,将转速信号转换为电压信号,采用szcb-03型号。
29.传感器模块m1输出的信号包括交流电压信号、直流电压信号和一些从现场环境中混入的噪声信号。
30.信号调理单元21:用于将从传感器模块输出的电信号进行信号处理,使之满足ad转换器23的信号输入的要求。信号调理单元21包括用于消除直流信号的交流信号耦合器211、用于对信号进行放大的增益放大器212和用于对信号进行滤波的低通滤波器213。其中,交流信号耦合器211采用mols22,增益放大器212采用lf353 bi-fet,低通滤波器213采用sjb920-30a。
31.多路复用器22:用于实现多路模拟信号的选通,通过不同的指令选择不同信号的采集。
32.ad转换器23:用于将处理后的模拟电信号转化为数字电信号。ad转换器23采用型号为ad7863的芯片,其转换的范围为
±
10v,是一款高速、低功耗、双14位模数转换器。
33.数字信号处理模块m3:用于对数字电信号进行快速傅里叶变换,获取1倍频的幅度值和相位值。采用tms320vc5402芯片,包括数据存储单元31、通信接口单元32和中断管理单元33,数据存储单元31和数据存储器模块m6通信连接,通信接口单元22与通信接口模块m4通信连接,中断管理单元33和cpld m5单向连接,数据信号处理模块m3的地址总线和数据总线与数据存储器模块m6连接。
34.由于旋转机械的故障大多反映在转速为基频的倍频信号的幅值和相位上,尤其是旋转机械的转子的转速为1倍频的信号。当一组数据经过数字信号处理模块m3的处理,得到幅度值谱和相位值谱。选取幅度值谱和相位值谱中每两点之间代表的频率间隔为采样频率,再除以采样长度,从而判断哪一点是1倍频的幅值和相位值。
35.cpld m5:通过逻辑功能产生不同优先级的中断信号,再通过不同的中断指令使数字信号处理模块m3和其他模块进行数据的发送和接收。同时,cpld m 5负责对数字信号处理模块m3的读写信号和地址信号进行译码,以产生对多路复用器22的选通信号、ad转换器23和数据存储器模块m6的控制信号。其功能主要是按照设定的帧结构和码速率,cpld m5产生各路模拟信号的选通脉冲,控制对数据存储器模块m6和ad转换器23的片选、数据的读写以及控制数据的传输方向。
36.数据存储器模块m6:系统选用256
×
16bit的is6ilv25616芯片作为ram存储器,选
用存储容量为4m位的sst39vf040芯片作为flash,数据存储器模块m6的片选端通过cpld m5再与数字信号处理模块m3连接。
37.通信接口模块m4:作为数字信号处理模块m3和上位机的中间枢纽。通信接口模块m4包括rtl8019as芯片,速率为10m/s,数字信号模块m3通过通信接口模块m4把数据传送到上位机中,上位机收集和显示振动信号。
38.通信接口模块m4中还包括xc95144x1芯片,位于rtl8019as芯片之前。由于通信接口模块的工作电压为5v,而数字信号处理模块m3的工作电压为3.3v,因此通信接口模块m4的输出信号要经过电平转换,中断信号也要经过电平转换反向传送给数字信号处理模块m3。xc95144x1芯片作为数字信号处理模块m3和rtl8019as芯片的转换枢纽,完成译码、电平变换及反向功能。
39.本实施例所提供的一种基于dsp和cpld的引风机振动信号采集系统的工作原理如下所述:
40.(1)电涡流传感器11和霍尔转速传感器12分别采集引风机各个振动信号和转速信号;采集的信号经交流信号耦合器211、增益放大器212和低通滤波器213依次进行隔直、放大和滤波处理后,得到交流信号。
41.(2)上位机发出采集命令并通过通信接口模块m4传送到数字信号处理模块m3;数字信号处理模块m3通过通信接口单元32接收命令后产生中断,由中断管理单元33将中断信号传送至cpld m5,cpld m5根据设定的帧结构和码速率产生各路模拟信号的选通脉冲;
42.(3)cpld m5产生的各路模拟信号的选通脉冲和经信号调理单元21处理的交流信号同时进入多路复用器22,进行模拟信号的选通。
43.(4)当某路模拟信号被选通后,多路复用器22反馈指令给cpld m5,cpld m5生成ad转换器23的读写信号和片选信号,由ad转换器23将此信号转换为数字信号传送给数字信号处理模块m3;
44.(5)数字信号处理模块m3接收到数字信号后进行快速傅里叶变换,得到幅值和相位值并存入至数据存储单元31的缓冲区内;同时中断管理单元33产生中断发送至cpld m5中;
45.(6)cpld m5接收中断信号后生成数据存储器模块m6的读写信号和片选信号并传送给数据存储器模块m6,同时释放数据存储单元31中的数据;
46.(7)当上位机发出读取命令时,数据存储单元31与数据存储器模块m6建立通信连接,获取数据存储器模块m6中的数据,通信接口单元32通过通信接口模块m4将数据传送给上位机。
47.以上详细描述了本实用新型的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本实用新型的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本实用新型的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1